(54) ШТАНГОВЫЙ КОНВЕЙЕР-НАКОПИТЕЛБ
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1979 |
|
SU839903A1 |
| Шаговый конвейер-накопитель | 1978 |
|
SU770947A1 |
| Шаговый конвейер | 1980 |
|
SU908690A1 |
| Штанговый конвейер | 1980 |
|
SU908693A1 |
| Штанговый конвейер | 1978 |
|
SU776959A1 |
| Шаговый конвейер | 1980 |
|
SU939350A1 |
| Шагающий конвейер-накопитель | 1985 |
|
SU1270075A1 |
| Штанговый конвейер | 1980 |
|
SU891528A1 |
| Шаговый конвейер | 1977 |
|
SU663637A1 |
| Транспортное устройство автоматических линий | 1982 |
|
SU1033405A1 |
Изобретение относится к транспортированию грузов с возможностью накопления их при наличии свободных мест на Линии транспортирования и может быть использовано в различных технологических процессах.
Известен штанговый конвейер, содержащий толкающую штангу, соверщающую возвратно-поступательное движение, с закрепленными на ней подпружиненными кулачками и планки, закрепленные на неподвижной станине 1.
Однако данный конвейер ненадежен в работе из-за частых поломок подпружиненных кулачков, особенно при значительном весе транспортируемых предметов.
Наиболее близким к предлагаемому, является штанговый конвейер-накопитель, содержащий раму с направляющими и штангу с толкателями, взаимодействующими с расположенными на раме датчиками 2., ,
Однако этот конвейер не обеспечивает надежной и безопасной работы из-за наличия большого количества упругих элементов, которыми снабжены и толкающие кулачки и датчики. Кроме того, наличие трущихся поверхностей увеличивает преждевременный
износ составных частей конвейера. Кулачки конвейера расположены в шахматном порядке с двух сторон щтанги, что способствует перекосу груза при перемещении. Основным недостатком конвейера является сложность его конструкции.
Цель изобретения - упрощение конструкции.
Поставленная цель достигается тем, что каждый датчик выполнен в виде изогнутого нeypaвнoвeшeннo o рычага, длина квторого равна двум шагам толкателя, при этом один
10 из концов толкателя снабжен консольно расположенным роликом, установленным с возможностью взаимодействия с наклонным участком рычага. Кроме тогО; другие концы рычагов и толкателей снабжены дополнительными роликами, причем в толкаISтеле выполнена выемка, в которой размещен дополнительный ролик.
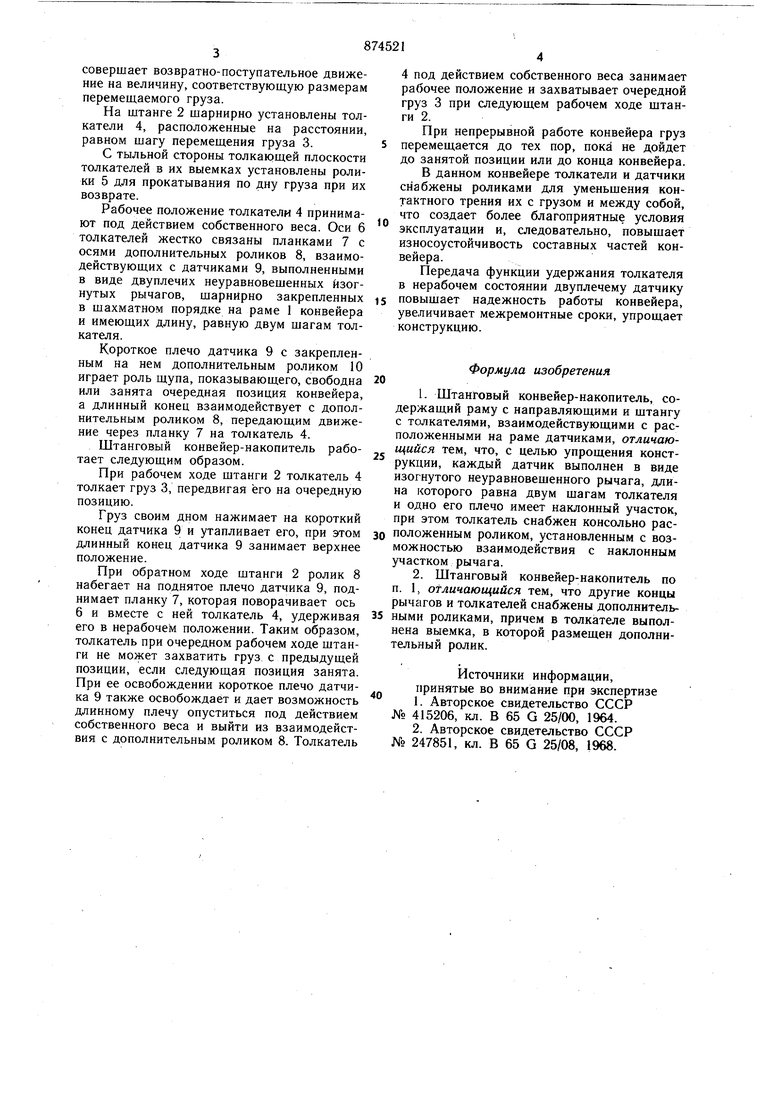
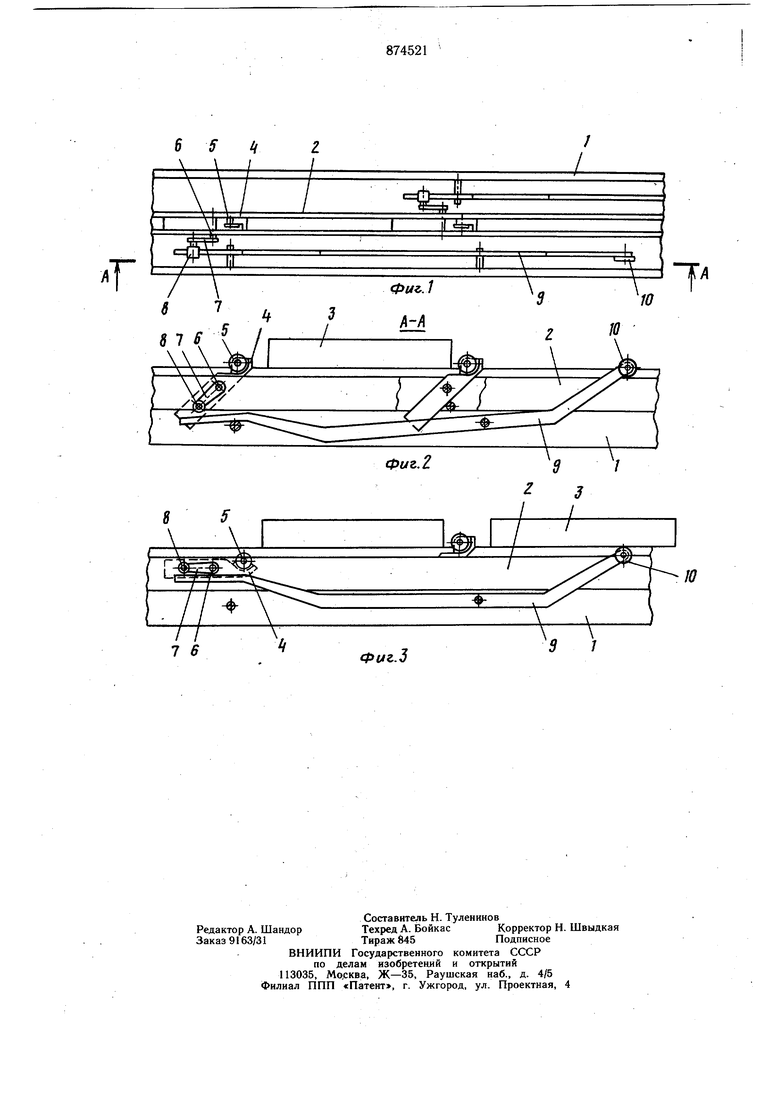
На фиг. 1 схематически изображен конвейер, вид сверху; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - положение конвейера 20 в работе.
Штанговый конвейер-накопитель содержит раму 1 с направляющими, по которым перемещается штанга 2 и груз 3. Штанга 2
совершает возвратно-поступательное движение на величину, соответствующую размерам перемещаемого груза.
На щтанге 2 шарнирно установлены толкатели 4, расположенные на расстоянии, равном шагу перемещения груза 3.
С тыльной стороны толкающей плоскости толкателей в их выемках установлены ролики 5 для прокатывания по дну груза при их возврате.
Рабочее положение толкатели 4 принимают под действием собственного веса. Оси 6 толкателей жестко связаны планками 7 с осями дополнительных роликов 8, взаимодействующих с датчиками 9, выполненными в виде двуплечих неуравновешенных изогнутых рычагов, щарнйрно закрепленных в шахматном порядке на раме 1 конвейера и имеющих длину, равную двум шагам толкателя.
Короткое плечо датчика 9 с закрепленным на нем дополнительным роликом 10 играет роль щупа, показывающего, свободна или занята очередная позиция конвейера, а длинный конец взаимодействует с дополнительным роликом 8, передающим движение через планку 7 на толкатель 4.
Штанговый конвейер-накопитель работает следующим образом.
При рабочем ходе щтанги 2 толкатель 4 толкает груз 3, передвигая его на очередную позицию.
Груз своим дном нажимает на короткий конец датчика 9 и утапливает его, при этом длинный конец датчика 9 занимает верхнее положение.
При обратном ходе штанги 2 ролик 8 набегает на поднятое плечо датчика 9, поднимает планку 7, которая поворачивает ось 6 и вместе с ней толкатель 4, удерживая его в нерабочем положении. Таким образом, толкатель при очередном рабочем ходе штанги не может захватить груз с предыдущей позиции, если следующая позиция занята. При ее освобождении короткое плечо датчика 9 также освобождает и дает возможность длинному плечу опуститься под действием собственного веса и выйти из взаимодействия с дополнительным роликом 8. Толкатель
4 ПОД действием собственного веса занимает рабочее положение и захватывает очередной груз 3 при следующем рабочем ходе щтанги 2.
При непрерывной работе конвейера груз перемещается до тех пор, пока не дойдет до занятой позиции или до конца конвейера.
В данном конвейере толкатели и датчики снабжены роликами для уменьшения контактного трения их с грузом и между собой, что создает более благоприятные условия эксплуатации и, следовательно, повышает износоустойчивость составных частей конвейера.
Передача функции удержания толкателя в нерабочем состоянии двуплечему датчику повыщает надежность работы конвейера, увеличивает межремонтные сроки, упрощает конструкцию.
Формула изобретения
Источники информации, принятые во внимание при экспертизе
Г
