изобретение относится к автоматическому управлению нестационарными технологическими процессами и может быть использовано в химической, нефтехимической ri металлургической промышленности, в частности, при производстве кальцинированной .соды.
Известна адаптивная система управления нестационарным процессом, содержащая Объект управления и соединенный с ним первым входом блок идентификации, с выхода которого сигнал поступает на блок управления, а выход блока управления соединен с входом объекта и вторым входом блока идентификации ij .
Недостатками этой системы являются отсутствие необходимых условий для идентификации и низкая точность управления при выходе управляющих воздействий, определенных блоком управления, за пределы технологических ограничений. Первый из указанных недостатков обусловлен технической реализацией линейно зависимых управляющих воздействий и закона идентификации на основе квадратичной меры качества идентификации. Второй недостаток связан с отсутствием возможности технически реализовать управляющие воздействия, определенные блоком управления, что- приводит к рассогласованию реального и заданного выходов объекта управления о
Наиболее близкой по технической сущности к изобретению является адаптивная система управления, содержаая объект управления и модель объекта управления, соединенные соответственно выходом и первым выходом с входами первого сумматора,выход которого соединен с первым входом умножения,регулятор,выходы которого соединены свходами объекта управления, первыми входами модели,последовательно соединены через входы релейного блока,.вторые входы первого блока умножения - с первыми входами первого блока деления и. через входы блока выпрямителей, сумматор - с вторым входом первого блока деления, ричем выходы первого блока деления соединены с вторыми входами модеи 2 .
Однако для известной системы хаактерны недостаточная точность и невысокое, качество управления, приводящие к увеличению расходов входных материальных и энергетических потоков технологического процесса бъекта управления, что обусловлено тсутствием учета технологических, граничений на расходы входных потоов и приводит к рассогласованию заанного значения параметра выходноо потока и его реального значения, .е. снижению точности управления. роме того, система синтезирована с
использованием показателя качества управления в виде квадратичной формы только от изменений входных потоков, параметрами которой является стоимость входных потоков.
Цель изобретения - повЕлшение точности и качества адаптивной системы управления.
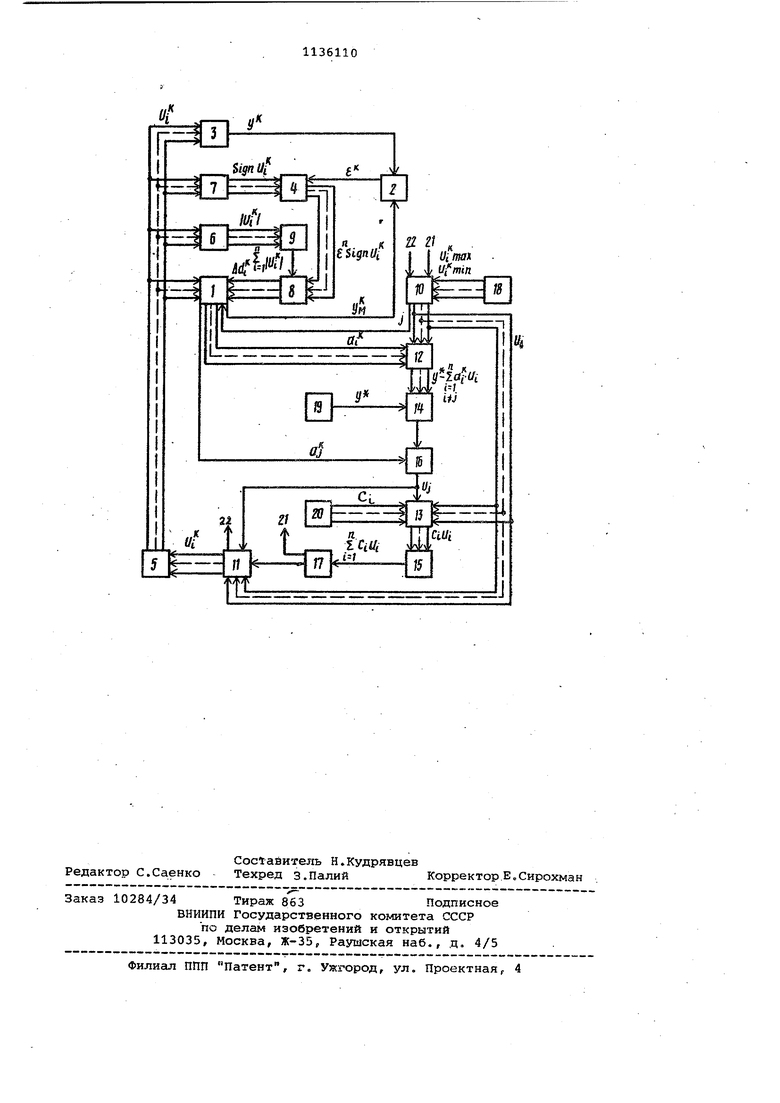
Поставленная цель достигается тем, что в адаптивную систему управления, содержащую модель объекта управления, подключенную первым выходом к первому входу первого сумматора, второй вход которого соединен с выходом объекта управления, выход первого сумглатора подключен к первому входу первого блока умножения, выход регулятора соединен с входом объекта управления, первым входом модели объекта управления, входом блока определения модуля и входом релейного блока, выход которого соединен с вторым входом первого блока умножения, выход которог подключен к первому входу первого блока деления, к второму входу которого подключен через второй суммато выход блока определения модуля, выход первого блока деления соединен с вторым входом модели объекта управления, введены два блока памяти, второй и третий блоки умножения, третий и четвертый сумматоры, второй блок деления, блок сравнения и три задатчика, причем первый вход первого блока памяти соединен с выходом первого задатчика, второй : вход - с первья/ выходом блока сравнения , третий вход - с первым выходом рторого блока памяти, первый выход первого блока памяти соединен с первыми входами йторого блока умножения, третьего блока умножения и второго блока памяти, второй выход первого блока памяти соединен с третьим входом модели объекта управления, вторым выходом подключенной к второму входу второго блока умножения, выход которого через третий сумматор подключен к первому входу второго блока деления, второй вход которого соединен с третьим выходом модели объекта управлений, выход втрого блока деления соединенс вторым входом третьего блока умножения и вторым входом второго блока памяти, вход четвертого сумматора подключен к выходу третьего блока умножения, а выход - к входу блока сравнения, вторым выходом соединенного с третьим входом второго блока, памяти, выходом подключенного к входу регулятора. выход второго задатчика соединен с входом третьего cyMpviaтора и выход третьего задатчика подключен к третьему входу третьего блока умножения. с технологической точки зрения в отличие от известной адаптивной системы качество ведения технологического процесса фиксируют на основе интегрального показателя расходов входных материальных и энерге тических потоков технологического процесса I 1с,П., где п - число входных потоков; - стоимости входных потоков; и- - значение входных потоков. При заданном значении параметра выходного потока технологического процесса, у, заданных верхних паи и нижних и- граничных значениях ВХОДНЫХ потоков, а также при идеи тифицированных параметрах и; модели йестационарного технологического процесса . У. 1 a,U; блоки, введенные дополнительно в предлагаемую систему позволяют образовать новый контур управления, и повысить точность и качество управления. На чертеже представлена блок-схе ма предлагаемой адаптивной системы управления. Система содержит модель 1 объекта .управления/ первый сумматор 2, объект 3 управления, первый блок 4 умножения, регулятор 5, блок б опре деления модуля, релейный блок 7, первый блок 8 деления, второй сумматор 9, первый 10 и второй 11 блоки памяти,. второй 12 и т Зетий 13 блоки умножения, третий 14 и четвер тый 15 сумматоры, второй блок 16 де ления, блок 17 сравнения, первый 18 второй 19 и третий 20 задатчики, вы ход 21 блока сравнения, выход 22 вт рого блока памяти. Система функционирует следующим образом,. Расходы входных потоков 0; в момент времени К с регулятора з посту пают на вход II-мерного объекта 3 уп равления , первый вход модели 1, вхо ды релейного блока 7 и блока б. В течение, заданного интервала времени U, расходы входных потоков остаются постоянными, и происходит идентификация параметров модели про цесса с последующим определением значений новых расходов входных пот ков. Выход у объекта 3 управления выход ijjj; модели сравниваются в первом сумматоре 2. После этого ошибка рассогласования с выхода первого су матора 2 Е-а--у: используется в контуре идентификаци .блоки 4, б, 7, 8, 9) для определеНИН величины коррекции параметров одели по закону , причем релейный блок 7 вырабатывает сигналы sign U;, а блок б и второй сумматор 9 образуют .: . Велиина коррекции параметров модели поступает на модель 1 через второй вход и приводит к новым значениям параметров.UQ . После завершения коррекции параметров контур идентификации (блоки 4, б, 7, 8, 9) переходит в состояние ожидания реакции на новые расходы входных потоков, С появлением реакции идентификация возобновляется. Завершение идентификации переводит в активное состояние из. состояния ожидания контур определения расходов входных потоков (блоки 10 20). Указанный контур в зависимости от конкретной реализации осуществляет от 1 до 2 циклов.поиска расходов входных потоков,,минимизирующих интегральный показатель расходов входных материальных и энергетических потоков. Первый цикл поиска управляющих воздействий отличается от всех последующих -тем, что первый 18, второй 19 и третий 20 задатчики устанавливают в заданное состояние (для интервала времени ) .- Кроме того, в блоке 17 сравнения устанавливают начальное значение Ig, заведомо большее Ippr- Поиск оптимальных расходов входных потоков на m-ом цикле осуществляется следующим образом. Первый блок 10 памяти, ожидающий окончания m -1 цикла, переходит в активное состояние и формирует допусти- , мне значения расходов входных потоков в соответствии с хранящейся матрицей и значениями of pijj и , поступающими на первый вход с первого задатчика 18. На каждом цикле используется одна строка матрицы (имеющей размерность: количество циклов «п) , соответствующая номеру цикла. Строки матрицы состоят из h цифр: минус единиц, плюс единиц и одного нуля. Формирование значений расходов входных потоков происходит путем замены элементов строки матрицы верхними или нижними граничными значениями входных потоков, причем i -и элемент строки соответствует. i -му потоку, минус единица заменяется на нижнее граничное значение, а плюс единица - на верхнее граничное значение. Исключение составляет нулевой элемент строки с номером , он
остается равным нулю. Таким образом на т-ом цикле полгучаем
;
U; , , . , , Ui ,, . , ,и„ ;
и( . О.
Г -.««м
Ui - и. . 1 о 8.
i «Г
причем « г i г С могут принимать все значения ot 1 до п включиteльнo. Вторые блоки 12 умножения, блок 16 деления, задатчик 19 и третий сумматор 14 вычисляют значения
и ( )/a, .
J . причем на первый вход второго бло ка 12 умножения поступают сформированные значения расходов входных потоков U; с первого входа первого блока 10 памяти, а на второй вход.значения параметров модели ci|J второго входа модели 1. Парные произве дения а; of с выхода второго блока. 1 умножения поступгиот на входы третьего сумматора 14, на другой вход которого поступает с второго задатчика 19 заданное значение параметра выходного потока технологического
процесса у. Разность ,5: аГ и с выхода третьего сумматора поступает на первый вход второго блока 16 деления, на другой вход которого с выхода модели 1 поступает значение параметра а .Номер параметра, поступающего на вход второго блока 16 де ления, определяется сигналом, идущи в каждом цикле с выхода nepBot-o бло ка 10 памяти на третий вход модели Блок 13 умножения, задатчик 20 и четвертый сумматор 15 вычисляют интегральный показатель входных потоков
.
причем на входы блока 13 умножения поступают полностью сформированные значения расходов входных потоков с выхода второго блока 16 деления и первого выхода первого блока 10 памяти, с выхода задатчика 20 поступают значения стоимостей входных потоков с . Блок 17 сравнения и второй блок 11 памяти определяют 1д и соответствующие ему значения Ul.
- mii Т,
. ЕСЛИ I., г 1,,,,где i Е, . ТО через I
1 , . .. , 1).Л ° через выход блока сравнения и первый вход первого блока 10 памяти замыкается обратная связь, в результате чего начинается т+1 цикл. Если. l iLtTO Iopt l
и управление передается через елок сравнения на третий вход второго блока 11 памяти. Последний активизируется и запоминает значения расходов входных потоков, поступающих на первый вход с первого выхода первого блока 10 памяти и на второй вход с выхода второго блока 16 деления соответственно. После запоминания значений расходов входных потоков второй блок 11 памяти переходит в состояние ожидания и замыкается обратная связь через блок 10 памяти. В результате этого начинается т+1 цикл
Работа контура определения значений расходов входных потоков на всех циклах, кроме последнего, аналогична
На последнем цикле обратные связи не замыкаются, управление передается с блока 17 сравнения на второй блок 11 памяти, откуда записанные последними, а следовательно, оптимальные значения расходов входных потоков через второй выход поступают на вход регулятора 5 и затем реализуются. Контур определения значений расходов входных потоков переходит в состояние ожидания.
Функционирование предлагаемой адаптивной системы в момент времени К+рС(,1,2...) аналогично описанному.
Изобретение реализует предложения дуального управления и может быть использовано для широкого класса нестационарных технологических процессов, например, в производстве кальцинированной соды.
Техническим преимуществом предлагаемой системы по сравнению с известной является то, что она учитывает ограничения на расходы входных потоков, позволяет в результате корректировки модели добиться высокой точности управления нестационарными технологическими процессами. Поскольку система минимизирует интегральный показатель расходов входных материальных и энергетических потоков, она улучшает технико-экономические показатели ведения процесса. Кроме того, |При управлении процессом она обес|печивает адаптацию не только к изменению характеристик процесса, но и к изменению ограничений .на расходы входных потоков в каждомтакте управления. Это особенно важно при согласовании функционирования нескольких технологических объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления | 1980 |
|
SU980070A1 |
| Адаптивный идентификатор | 1984 |
|
SU1136115A1 |
| Адаптивная система для идентификации объекта управления | 1980 |
|
SU875337A1 |
| Адаптивный регулятор | 1985 |
|
SU1265697A1 |
| Адаптивная система управления | 1982 |
|
SU1071996A1 |
| Система адаптивного управления параметром технологического процесса | 1988 |
|
SU1620989A1 |
| Система автоматического управления | 1984 |
|
SU1275370A1 |
| Адаптивный экстраполятор | 1982 |
|
SU1042031A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Адаптивный идентификатор | 1989 |
|
SU1670674A1 |
АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая модель объекта управления, подключенную первым выходом к первому входу первого сумматора, второй вход которого соединен с выходом объекта управления, выход первого сумматора подключен к первому входу первого блока умножения, выход регулятора соединен с входом объекта управления, первым входом модели объекта управления, входом блока определения модуля и входом релейного блока, выход которого соединен с вторым входом первого блока умножения, выход которого подключен к первому ёходу первого блока деления , к второму входу которого подключен через второй сумматор выход блока определения модуля, выход первого блока деления соединен с вторым входом модели объекта управления, отличающаяся тем, , с целью повышения точности и качества управления, в нее введены два блока памяти, второй и третий блоки умножения, третий и четвертый сумматоры, второй блок деления, блок сравнения и три задатчика, причем первый вход первого блока памяти соединен с выходом первого задатчика, второй вход с первым выходом блока сравнения, третий вход - с первым выходом второго блока памяти, первый выход первого блока памяти соединен с первыми входами второго блока умножения, третьего блока умножения и второго блока памяти, вт)рой выход первого блока памяти соединен с третьим входом модели объекта управления, подключенной вторым выходом к второму входу второго блока умножения, выход которого через третий сумматор подСО ключен к первому входу второго блока деления, второй вход которого соединен с третьим выходом модели объекта управления, выход второго блока деления соединен с вторым входом третьего блока умножения и вторым входом второго блока памяти, вход четвертого сумматора подключен к выходу третьего блока умножения, а вы:о зь ход - к входу блока сравнения, соединенного вторым выходом с г етьим входом второго блока памяти, подключенного выходом к входу регулятора, выход второго задатчика соединен с входом третьего сумматора и выход |третьего задатчике подключен к третьему входу третьего блока умножения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ли Р | |||
| Оптимальные оценки определения характеристик и управления | |||
| М | |||
| , Наука, 1966, с | |||
| Вага для выталкивания костылей из шпал | 1920 |
|
SU161A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
