на твердое тело, и определение крупности по вел.ичине измеренных ди-намяческих воздействий, до оодачи материала на твердое тело непрерывно измеряют расход материала, в зависимости от которого изменяют угол между Поверхностью твердого тела и направлением .потока материала.
Сущность способа заключается в том, что при увеличении расхода материала возрастает кинематическая энергия падающего потока частиц, поэтому возрастает динамическое воздействие потока на твердое тело, расположенное в потоке материала. При расположении поверхности твердого тела под углом а. к направлению потока частиц динамическое воздействие на это тело будет определяться кинетической энергией потока и углом а. При постоянном углр а динамическое воздействие на тело будет зависеть от расхода материала. Изменением угла а можно .компенсировать изменение динамического воздействия .потока на твердое тело. При этом с увеличением ра-схода материала угол ее необходимо уменьщать.
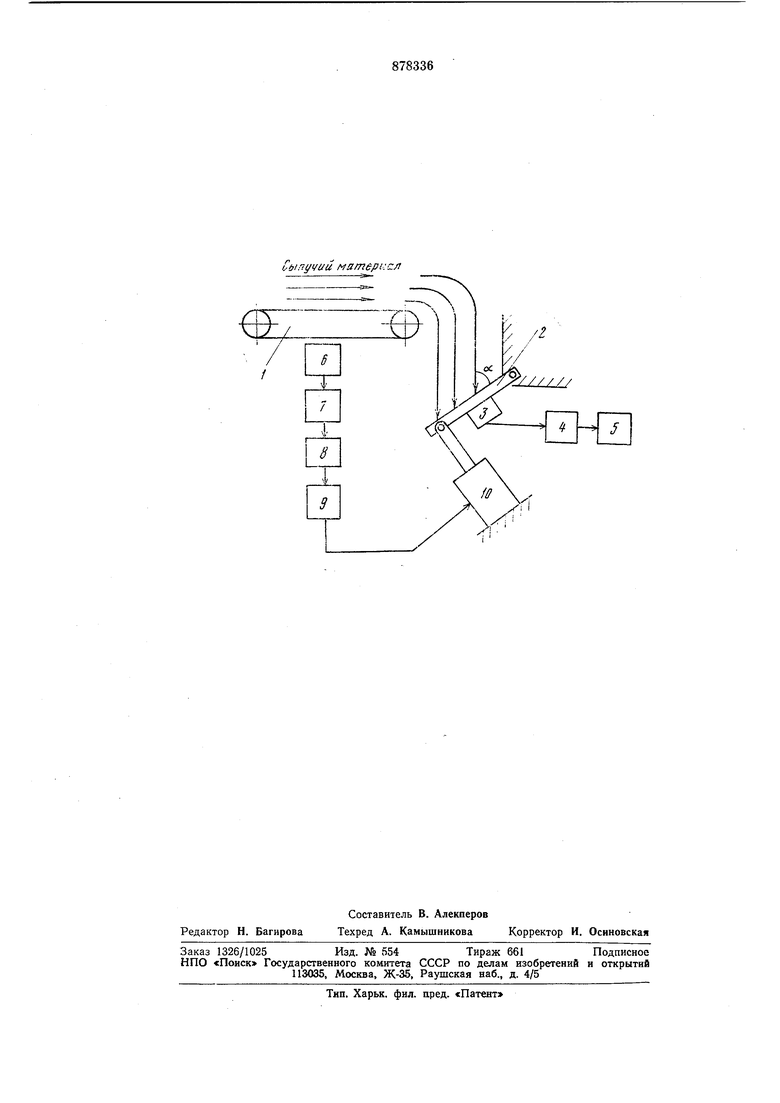
На чертеже изображена схема устройства, реализующая, способ.
Схема содержит конвейер ,/, транспортирующий сыпучий материал, который в месте .перегрузки падает «а твердое тело 2. Угол между поверхностью тела 2 и направлением потока частиц равен ос. Чувствительный элемент 3 жестко связан с телом 2 и измеряет вибрацию, возникающую в теле, вызванную ударом о него потока сыпучего материала. Сигнал с чувствительного элемента 3 поступает на преобразователь 4, а с него на вторичный прибо.р 5. Вес потока сыпучего материала измеряется датчиком 6 веса. Сигнал с датчика 6 поступает на преобразователь 7, а затем в блок
8расчета, где по значению веса материала рассчитывается требуемое значение угла а. Рассчитанное значение угла а поступает в регулятор 9 в качестве задания. Регулятор
9связан с исполнительным органом 10, который изменяет угол а в соответствии с рассчитанным в блоке 5 значением.
Схема работает следующим образом.
С конвейера / сыпучий материал падает на твердое тело 2, расположенное под углом а .к (Направлению потока материала. Динамическое воздействие, оказываемое на тело 2, будет определяться массой материала, скоростью его падения в момент соприкосновения с телом 2 и углом а между поверхностью тела 2 и направ.лен:ием падения материала. Чувствительный элемент 3, расположенный на теле 2, измеряет вябраЦию тела 2.
Сигнал вибрации, пропорциональный средней крупности материала, через преобразователь 4 поступает на вторичный нр.ибор 5, где фиксируется крупность сыпучего материала.
Датчик 6 веса непрерывно измеряет вес сыпучего материала, .падающего на тело 2. При измерении веса материала, сигнал с датчика 6 через преобразователь 7 поступает в блок 8 расчета, где задана функция изменения угла а в зав.исимо.сти от веса материала. В блоке 8 рассчитывается новое задание регулятору 9, которое компенсирует изменение динамического воздействия,
оказываемого на тело 2 и вызванное изменением расхода материала. Рассчитанное задание поступает в регулятор 9, который вырабатывает управляющий сигнал исполнительному органу 10 в соответствии с новым заданием. Исполнительный орган 10 отрабатывает управляющ.ий сигнал и поворачивает тело 2 на заданный угол.
Предлагаемый способ позволяет повысить точность контроля крупности сыпучего материала, так .как исключает влияние на .показания изменения расхода матер.иала.
Формула изобретения
Способ контроля крупности сыпучих материалов, включающий измерение динамических воздействий потока материала,
подаваемого на твердое тело, и определения крупности по величине измеренных динамических воздействий, отличающийс я тем, что, с целью повышения точности контроля, до подачи материала на твердое
тело непрерывно измеряют расход материала, в зависимости от которого изменяют угол между поверхностью твердого тела и направлением потока материала.
Источники информации, принятые во внимание при экспертизе:
1 Авторское св1идетельство СССР № 5781106, кл. В 02 С 25/00, 1977.
2. Авторское свидетельство СССР № 556834, кл. -В i02 С Й5/00, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля крупности сыпучих материалов | 1981 |
|
SU946670A1 |
| Устройство для контроля крупности сыпучих материалов | 1982 |
|
SU1069856A1 |
| Устройство для контроля крупности сыпучих материалов | 1981 |
|
SU1012103A1 |
| Способ автоматического регулирования процесса магнитной сепарации | 1981 |
|
SU1076144A1 |
| Система управления лотковым вибродозатором для шаровых мельниц | 1984 |
|
SU1237252A1 |
| Система автоматического управления измельчительным комплексом | 1983 |
|
SU1134237A1 |
| Система управления измельчительным комплексом | 1982 |
|
SU1021472A1 |
| Способ контроля содержания крупного класса в потоке кускового материала | 1977 |
|
SU662145A1 |
| Способ автоматического управления процессом магнитной сепарации | 1981 |
|
SU1039568A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТЕХНИЧЕСКИ ОПТИМАЛЬНЫМ УГЛОМ НАКЛОНА НЕПОДВИЖНОЙ НАПРАВЛЯЮЩЕЙ ПОВЕРХНОСТИ ДВИЖЕНИЯ ВЗВЕШИВАЕМОЙ И ДОЗИРУЕМОЙ СЫПУЧЕЙ СМЕСИ САМОТЕКОМ ЗА СЧЕТ СИЛЫ ЗЕМНОГО ТЯГОТЕНИЯ ПРИ ПРИГОТОВЛЕНИИ И РАЗДАЧЕ КОРМОВ И КОРМОВЫХ СМЕСЕЙ В ЖИВОТНОВОДСТВЕ И ПТИЦЕВОДСТВЕ | 2014 |
|
RU2597437C2 |