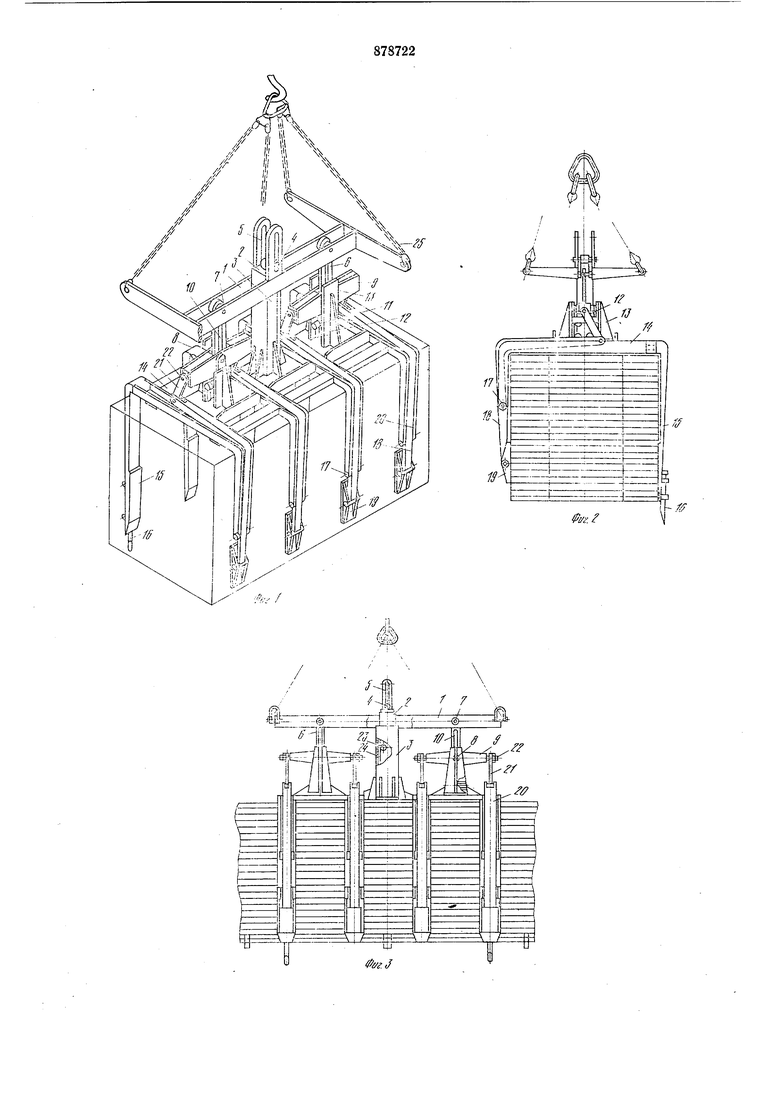
рычаги 18 соединены тягами 21 со штырями 22, установленными на концах коробчатых балансиров 9. Механизм фиксации 3 снабжен также роликовой кареткой 23, передвигающейся по направляющим 24. Захват подвешивается к крану с помощью четырехветвевого канатного стропа 25.
Автоматический захват для пакетов штучных грузов работает следующим образом.
При опускании захвата на пакет пиломатериалов подвижные захватные рычаги 18 раскрыты и траверса 1 удерживается механизмом фиксации 3 в своем нижнем положении. Неподвижные захватные рычаги 15 вводятся в узкую щель между пакетами пиломатериалов, а выдвижные направляющие 16, выступающие за нижний габарит захвата, при опускании захвата в момент касания концом пола вдвигаются во внутрь. При дальнейшем опускании стропа 25, когда рама 14 коснется верхней плоскости пакета, траверса 1 с механизмом фиксации 3 займут крайнее нижнее положение, получая свободу перемещения за счет пазов 10 в серьгах 6 и паза в серьге 5. При последующем подъеме стропа 25 произойдет переключение механизма фиксации 3, при котором траверса 1 получает возможность перемещения в крайнее верхнее положение. Поднимаясь вверх, траверса 1 увлекает за собой и серьги 6 с роликовыми каретками 11, на которых шарнирно закреплены балансиры 9, и с помощью тяг 21 поворачивает подвижные захватные рычаги 18 относительно оси 17. Происходит зажатие пакета между подвижными захватными рычагами 18 и неподвижными захватными рычагами 15, причем сила зажатия пропорциональна массе пакета. Равномерность распределения нагрузки на захватные рычаги 18 и 15, обеспечивающая удержание длинномерного пакета, достигается возможностью качания траверсы 1 и балансиров 9, располагающихся вдоль пакета. При выгрузке захват с пакетом опускается на поверхность. При
дальнейшем опускании траверсы 1 серьги 6 освобождают от натяжения каретки И, которые через балансиры 9 и тяги 21 увлекаются вниз неуравновешенной частью захватного рычага 18. Происходит открытие захвата, подвижные захватные рычаги 18 доходят, до крайнего фиксированного положения, а траверса 1 вместе с подвижной частью 2 механизма фиксации 3 за счет пазов в. серьгах 5 и 6 продолжают движение до крайнего нижнего положения, в котором происходит переключение механизма фиксации 3, закрепляющего траверсу 1 в нижнем положении. При подъеме подвижные
захватные рычаги 18 остаются открытыми, так как траверса 1 зафиксирована в нижнем положении, пакет же остается на месте. Данная конструкция захвата исключает
смещение точки подвеса захвата относительно це1|тра тяжести, что повышает удобство его Б эксплуатации.
Формула изобретения
Автоматический захват для пакетов штучных грузов, преимущественно пиломатериалов, содержащий раму, на которой шарнирно закреплены захватные рычаги,
механизм фиксации рычагов в раскрытом положении, закрепленный на раме, траверсу, закрепленную на подвижной части механизма фиксации и соединенную с зажимными рычагами, отл ич а ющи-й ся тем,
что, с целью повышения удобства в эксплуатации, соединение траверсы с захватными рычагами содержит каретку, установленную в направляЕОЩИх, закрепленных на раме, серьгу, связанную с траверсой и кареткой, и балансир, шарнирно связанный с кареткой и через тяги - с захватными рычагами.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 178465, кл. В 66С 1/10, 1964.

| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ПАКЕТОВ ШТУЧНЫХ ГРУЗОВ | 1972 |
|
SU336257A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Автоматическое захватное устройство для пакета рулонов | 1979 |
|
SU895887A1 |
| Автоматическое захватное устройство для пакета рулонов | 1975 |
|
SU583079A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
| Грузозахватное устройство | 1990 |
|
SU1744036A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| Захватное устройство | 1989 |
|
SU1615134A1 |
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |

М- --©Йх г /
25
Xf /
г.
