1
Изобретение относится к транспортному машиностроению, в частности к средствам для погрузки, разгрузки, транспортировки пакетов штучнь Х грузов, Б частности дпя пакета рулонов рубероида, пергамина, бумаги и т.п. материалов.
Известно устройство дпя захвата штучных грузов, содержащее траверсу с меха нвзмом фиксации, соединенным посредством тяг с захватными рычагами, с лапами lj предназначе шое для подъема и транспорти-. ровки пакетов жестких ящиков.
Однако известное устройство не может обеспечить захват пакета рулоНов
Известно также захватное устройство, содержащее раму с захватными рычагами, на которнмх шарнирно закреплены изогнутые вовнутрь аажимные лапы, и траверсу, сое диненную с рамой посредством механизма фиксации рычагов в раскрытом положений
21.
Однако такое устройство не обеспечивае безопасного захвата пакета рулонов, состоящего из нескольких рядов, с четырех сторон,
2
Цели изобретения - повышение надеж™ ности захвата пакета рулонов„
Указашгая цель достгггается тем, что на раме закреплены боковые регулируемые рычагиJ, на которых шарнирно закреплены упорные стенки,
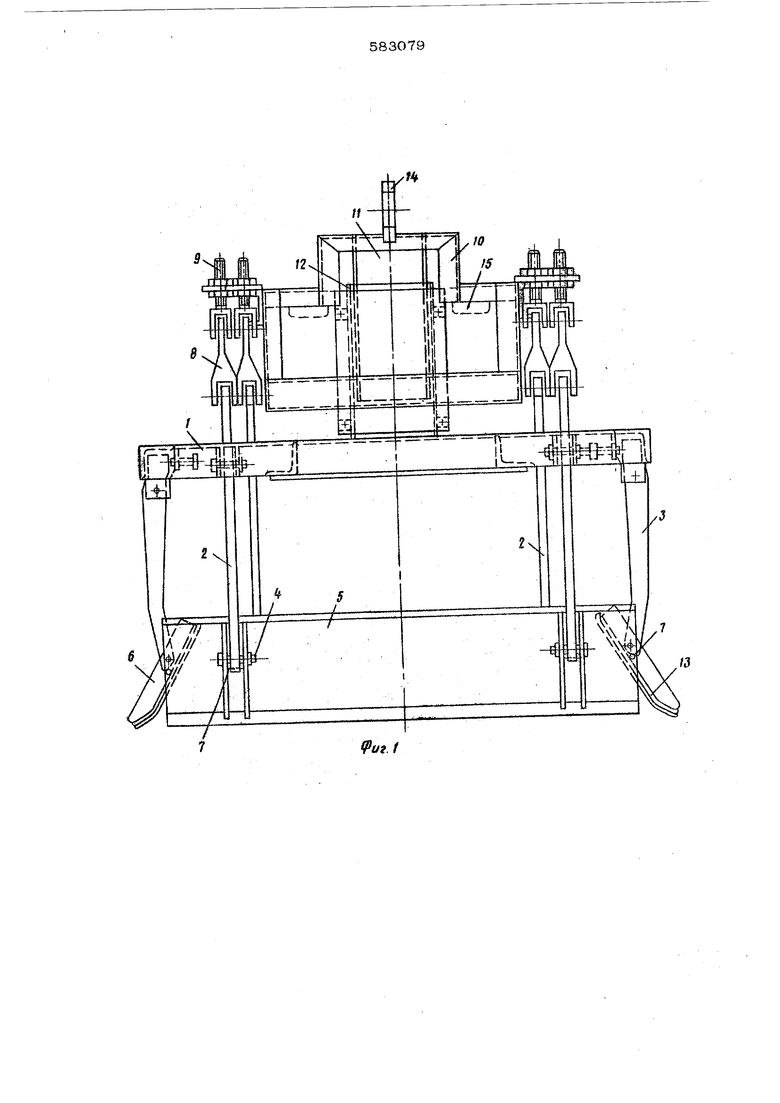
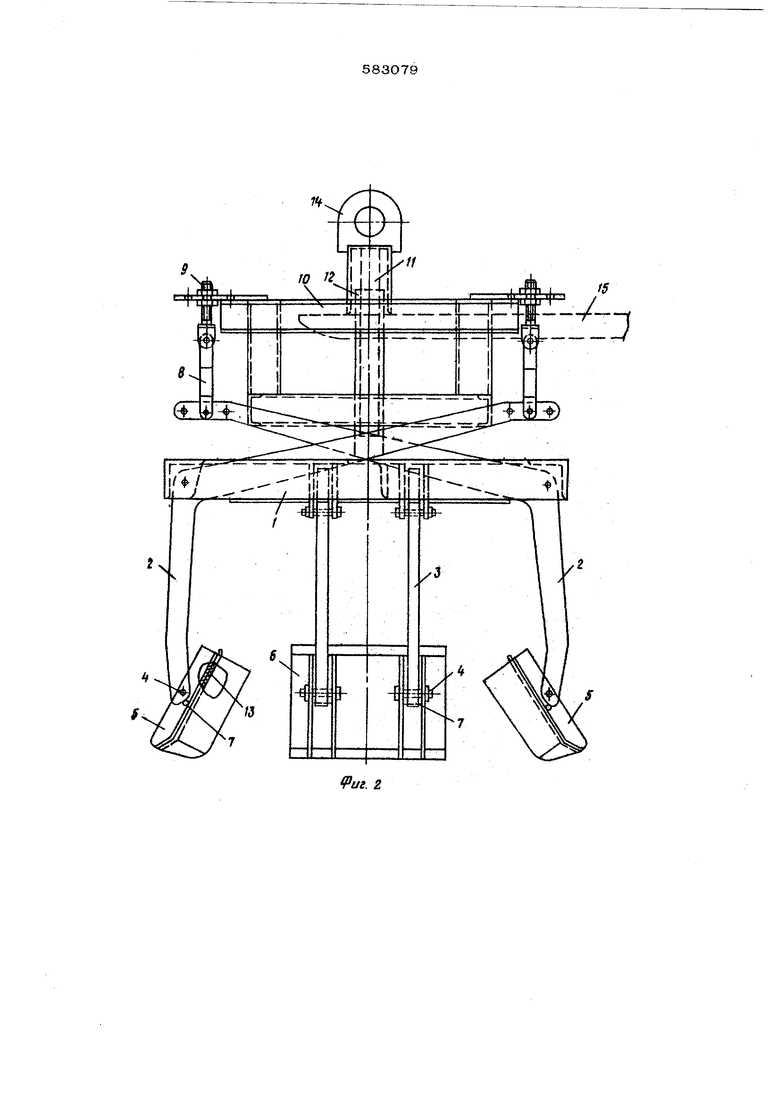
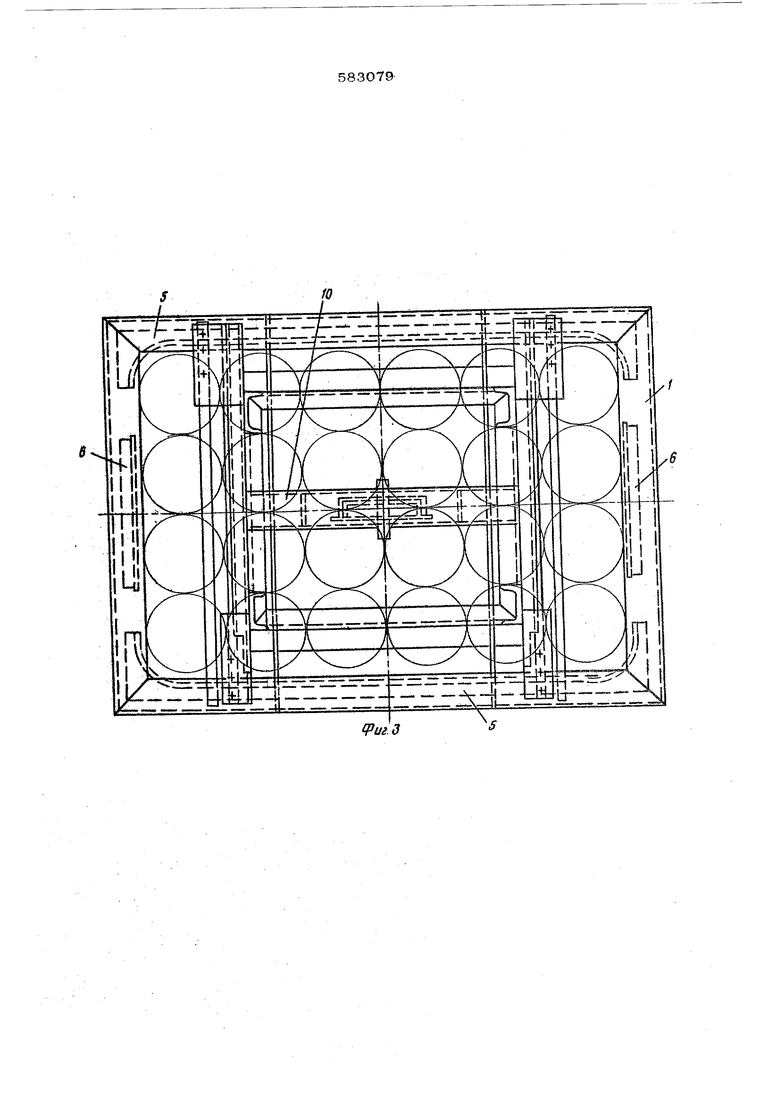
На фиг. 1 изображено устройство в свободном состоянии, ВИД сбоку; на фиг, 2 то же, ввд спереди; на фяг« 3 - то же, вид е влане; на фиг, 4 - упорная стенка, разрез,
Автоматическое захватное устройства состоит из рамы 1, на которой шарнирно устаноа1ено четыре захватных рычага 2 и четыре боковых регулируемых упорных рыча га 3, На рычагах 2 посредством шарниров 4 закреплены зажш.гаые лапы 5 а на рычагах 3 таклад шарнирно закреппены упорные стенкй 6, На лапах 5 и стенках 6 жестко укреплены упоры 7, .вааимодействующнр срычагами 2 и 3. Вторые концы захватных рычагов 2 шарнирно связаны с ч ягами 8 н через регулкруемые подвески 9 соединены с траверсой Ю Последняя жестко скреплена с внутренней подвижкой коробкой i 1 фкксируюшего механизма, неподвижная коробйа 12 которого жестко скреплена с рамой 1, Зажимные лапы 5 и упорные стенки 6 облицованы упругим, эпасгичным i материалом 13, например резиной. Траверса 1О связана с серьгой 14, служащей для подвешивания на подъемный механизм ,Ш1Н же непосредственно устанавливается на кпыкр ig погрузчика. С целью более правииьяого фо мирования пакета рулонных материалов (гру зов) зажимные лапы 5 по концам могут бить выполнены закругленными вовнутрь.
Автоматическое зах 1атное устройство pia-v ботает -следующим образом. При опускании захватного устройства на пакет рулонов aaxiватные рычаги 2 раскрыты и удерживаются в тако положении фиксирующим механизмом а зажимные лапы 5 и упорные стенш 6 на- ходятся в наклонном положении к горизонту и удерживаются в этом положении упорами 7. Как только одна из стенок устройства коснется пакета рулонов, благодаря своему наклону, она начинает ориентировйть уст« ройство относительно пакета. Смещение захватного устройства происходит до тех пор пока стенка псдаорачивается вокруг шарн1фа
4и занимает вертикальное положение. Ааалбгичным образом работает и одна из смежных лап. Таким образом стешш и папы устройства ориентируют его относительно пакета рулонов. При дальнейшем опускашга захватного устройства рама 1 ложится на пакет рулонов. Вместе с рамой 1 приостановит движение и коробка IS, а траверса
1О продолжает движение вниз вместе с коробкой li фиксирующего механизма. Это относительное смещение коробок 11 и 12 фиксирующего механизма освобождает захватные рычаги 2. При последующем подъеме захватного устройства траверса Ю через подвеску 9 и тяги 8 поворачивает захватные рычаги 2, и они посредством зажимных лап
5начинают сжимать пакет рулоне с двух
сторон При этом пакет рулонов расширяется в перпендикулярном направлении и прижимается S. упорным .стенкам 6, Таким образом оруществляетчзя ёсесторонний зажим пакета рулонов, Свяа сжат1 я пакета рулонов регулируется посредстеом подвесок 9 и тяг 8 путем гх смещения на траверсе относительно рычагов 2, изменяя при этом их плечо. В зажатом состоянии стопка рулонов переносятся н опусаается на место скдадировааня или в транспортное устройство,
При опускании захватного устройства рама 1 ложится на пакет рулонов, а траверса 10 двигается вниз Это вызывает относительное движение коробок 11 и 12|мехавизма, который фиксирует рычаги 2- в разведенном состоянии, в которое они приводятся движением трйверсы 10. После этого захватное устройство свободно поднимается и готово для захвата очередного пакета рулонов.
Предложенное авгомагическое захватное устройство может работать как с подъемным краном, так и с погрузчиками,
Ф о р кл у л Эй 3 обретения Автоматическое захватное устройство для паке-Ра рулонов, содержащее раму с зах ватными рычагами, на которых шарннрно закреплены изогнутые вовнутрь зажимные АапЫ( и траверсу, соединенную с рамой посредством механизма фиксации рычагов в раскрытом положении, отличающееся тем, что, с целью повышения надежности захвата пакета рулонов, на раме закреплены боковые регулируемые рычаги, йа которых шарннрно закреплены упорные стенки.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР NO 336257, кл. В 66 С 1/42, 1971с
2,Авторское сввдетепьство СССР № 2144782, кп. В 66 С 1/44, 1966.
fPui.Z ж
iif
li I
i I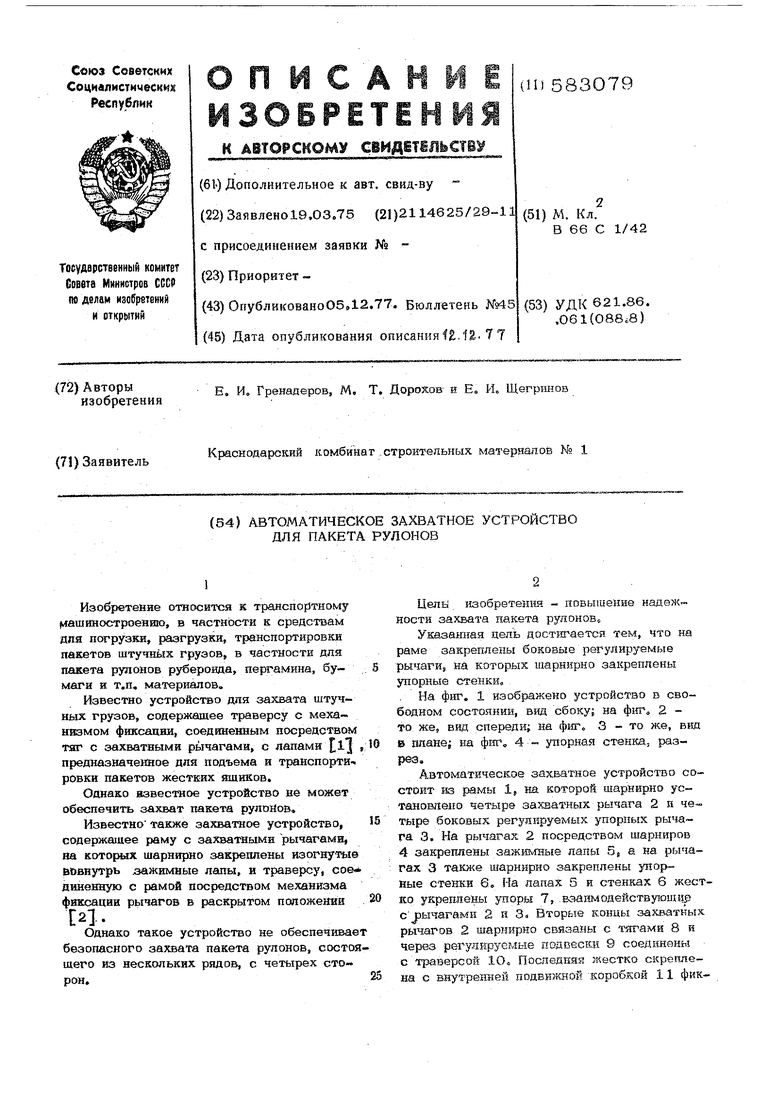
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое захватное устройство для пакета рулонов | 1979 |
|
SU895887A1 |
| Захватное устройство к погрузчику | 1978 |
|
SU749798A1 |
| Захватное устройство для бесподдонных пакетов кирпича | 1979 |
|
SU895882A1 |
| Способ подъема и транспортирования захватным устройством пакетов штучных грузов прямоугольной формы и захватное устройство для его осуществления | 1978 |
|
SU870332A1 |
| Грузозахватное устройство | 1976 |
|
SU763233A1 |
| Автоматический захват для пакетов штучных грузов | 1980 |
|
SU878722A1 |
| Грузозахватное устройство | 1982 |
|
SU1098896A1 |
| Устройство для кантования изделий | 1990 |
|
SU1782877A1 |
| Грузозахватное устройство | 1977 |
|
SU698897A1 |
| Захват для изделий | 1980 |
|
SU931649A1 |