Устройство работает следующим образом.
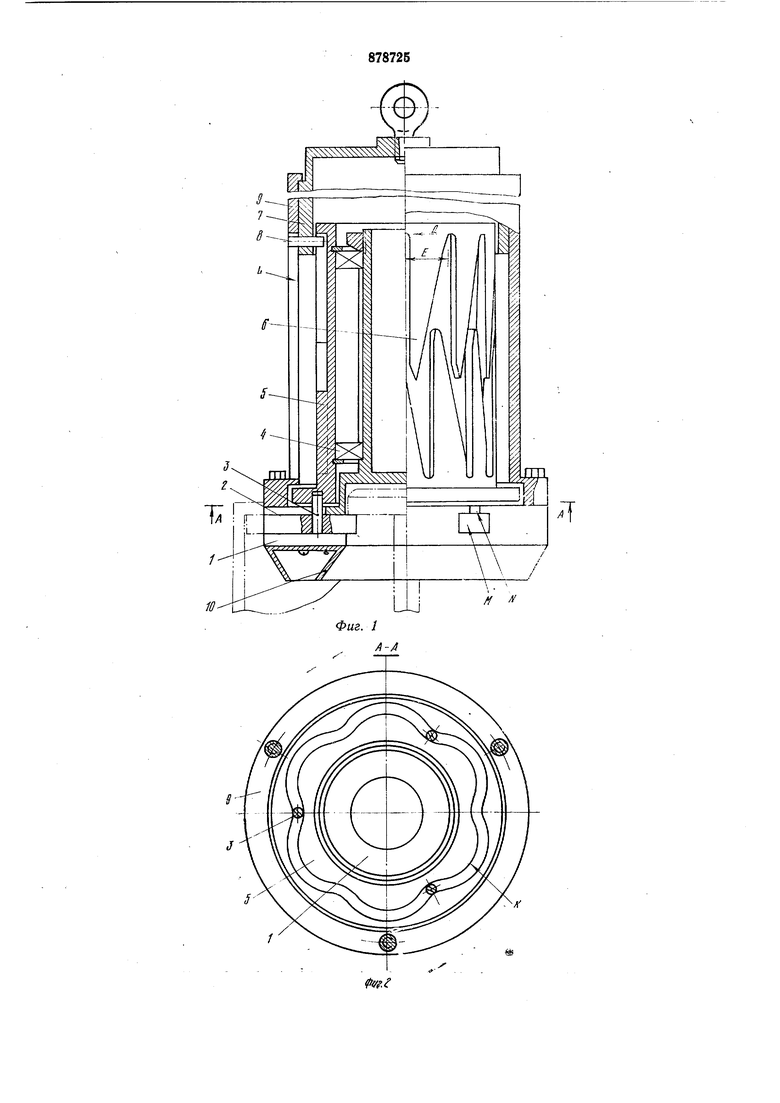
Подъемно-транспортным средством опускают устройство на груз. Корпус 1 упнрается в головку груза и прекращает движение вниз. Ползун 7 под действием собственного веса опускается вниз на всю длину паза L наружной втулки 9, при этом поворотпая втулка 5 поворачивается штифтом 8, скользящим по пазу 6. Это обеспечивает перемещение радиально установлеппых захватных кулачков 2, пальцы 3 которых контактируют с фигурной кац авкой К на торце поворотной втулки 5, к оси захвата на половину их максимального хода. При движеНИИ подъемно-транспортного средства вверх ползун 7 производит доворот поворотной втулки 5 и одновременное перемещение к оси захвата радиально установленных захватных кулачков 2 на вторую половину их максимального хода. Поверхности пазов 6 смещены относительно друг друга так, что штифт 8, запрессованный в ползун 7, при вниз и вверх по пазу L наружной втулки 9 производит вращение поворотной втулки 5 в направлении стрелки D на дугу Е. Груз захватывается кулачками 2 за головку или фланец.
Отстропка груза производится следующим образом.
Когда удерживаемый груз коснется поверхности, на которую его поставили, поворотная втулка 5 при опускании иолзуна 7 поворачивается еще на половину дуги Е, а при последующем подъеме ползуна 7 происходит доворот поворотной втулки 5 на вторую половину дуги Е, при этом радиальпо установленные захватные кулачки 2 задвигаются в корпус 1 и освобождают головку груза.
Таким образом, устройство работает но бесконечному циклу, т. е. при одном опускании и подъеме производится застропка груза, при повторном опускании и подъеме - его отстропка.
Описание работы дано в применении к застропке за наружную поверхность груза, имеющую головку или окна. При застропке за внутреннюю поверхность груза, имеющую окна, используются противоположные движения радиально установленных захватных кулачков, что позволяет расширить технологические возможности захвата.
Применение предлагаемого грузозахватного устройства позволяет осуществлять надежный автоматический захват грузов, снабженных головками, фланцами или окнами.
Формула изобретения
Грузозахватное устройство, содержащее корпус, установленные на нем захватные кулачки и механизм фиксации положения кулачков, включающий ползун, отличающееся тем, что, с целью повыщения надежности захвата груза, механизм фиксации содержит наружную втулку с вертикальным пазом и установленную на корпусе с возможностью поворота внутреннюю втулку, на которой выполнены зигзагообразные пазы и фигурная канавка с выступами для взаимодействия с кулачками, а на ползуне жестко закреплен щтифт, концы которого входят в пазы наружной и внутренней втулок, причем число выстунов канавки равно числу зигзагов пазов.
Источники информации, принятые во внимание при экспертизе
1.Патент Франции № 1337489, кл. В 66С, 1963.
2.Авторское свидетельство СССР № 320436, кл. В 66С 1/66, 1968 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ С ФИГУРНОЙ ГОЛОВКОЙ | 1991 |
|
RU2034770C1 |
| Захватное устройство для грузов, снабженных штырем с фигурной головкой | 1973 |
|
SU542709A1 |
| Захватное устройство для грузов с фигурной головкой | 1977 |
|
SU727553A1 |
| Грузозахватное устройство | 1985 |
|
SU1301761A1 |
| Автоматический захват для грузов с фигурной головкой | 1988 |
|
SU1625808A1 |
| Стыковочный захват | 1975 |
|
SU548541A1 |
| Устройство для автоматической застропки и отстропки грузов с жесткими петлями | 1983 |
|
SU1115991A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2012 |
|
RU2525191C1 |
| Грузозахватное устройство | 1988 |
|
SU1624909A1 |
| Грузозахватное устройство | 1986 |
|
SU1393760A2 |