СП
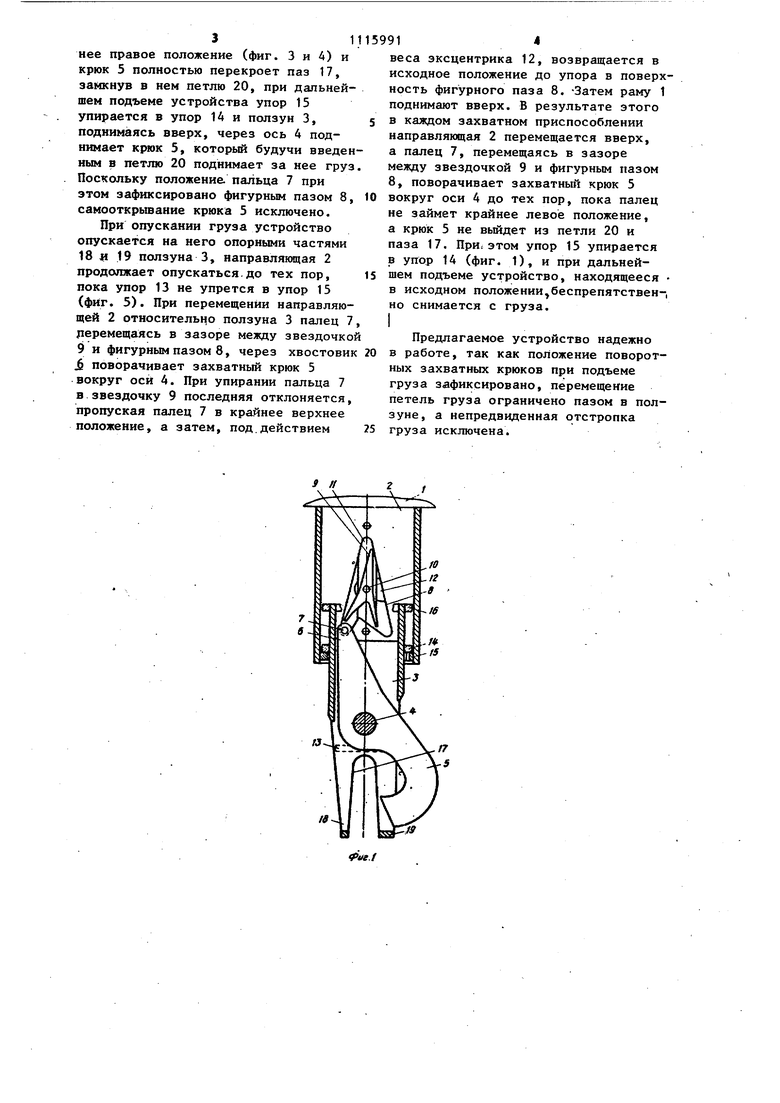
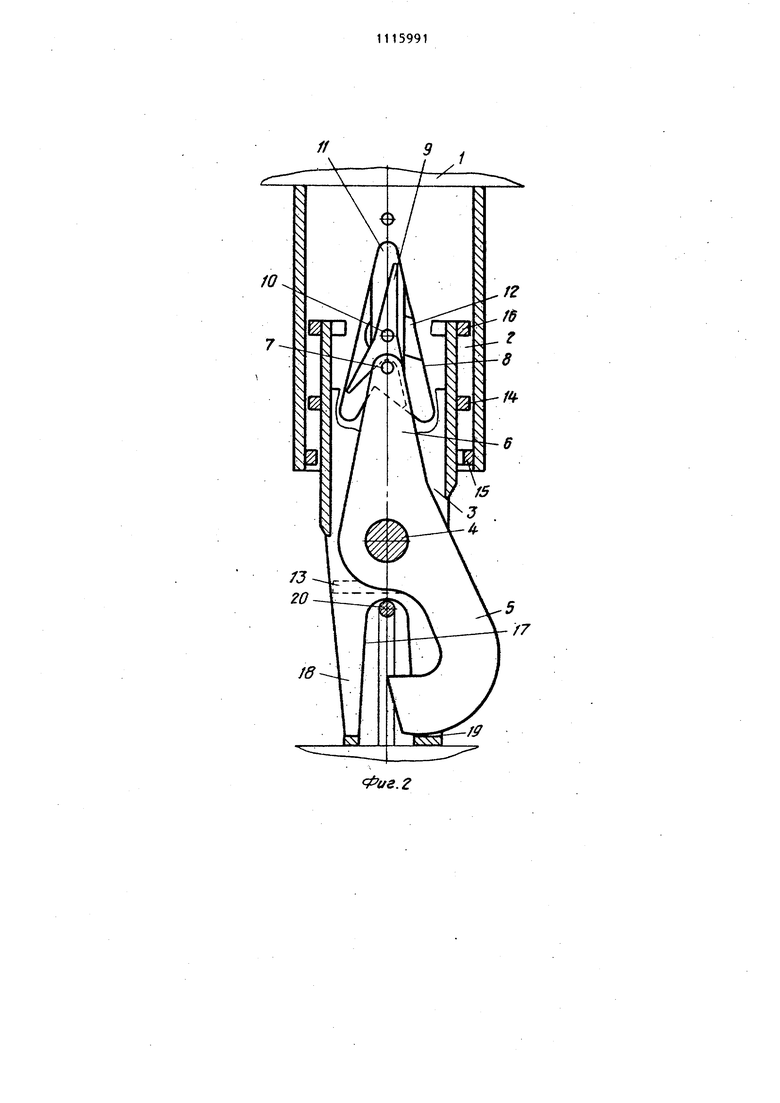
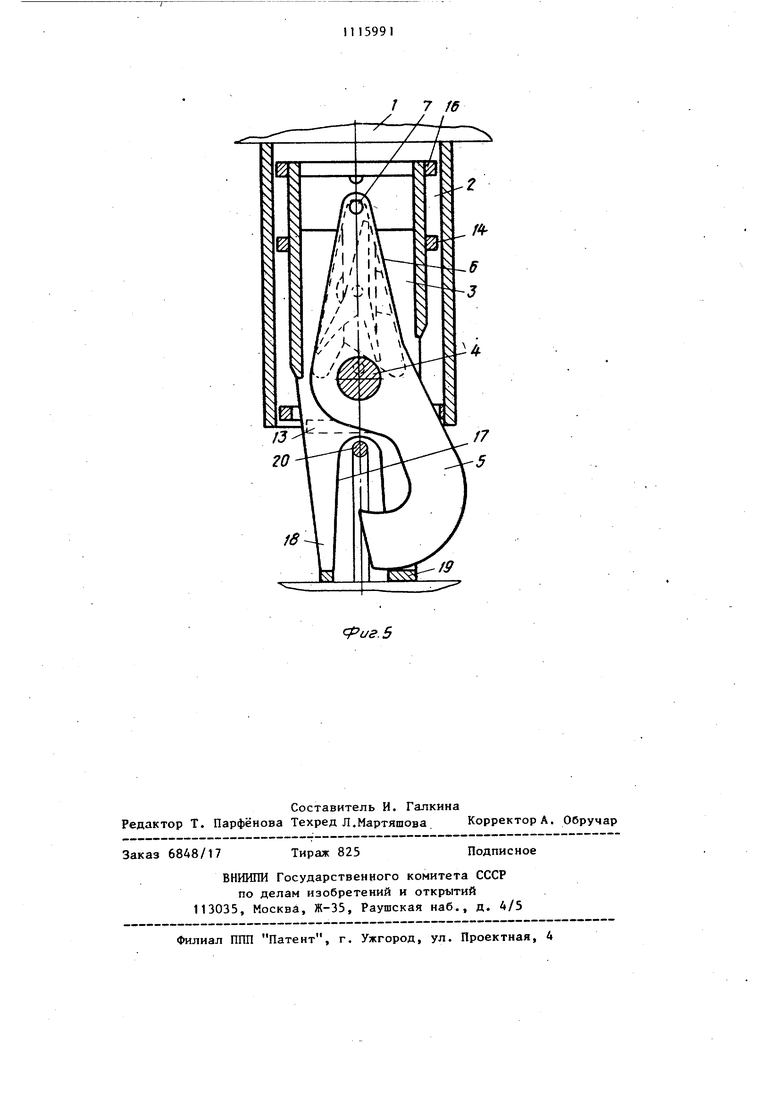
;о со Изобретение относится к подъемнотран.спортной технике, в частности к устройствам для автоматической застропки и отстропки грузов ,с жесткими петлями. . Известно устройство для автоматической застропки и отстропки грузов с жёсткими петлями, содержащее раму по крайней мере с одним поворотным захватным крюком и направляющей, в которой расположен ползун, кинематически связанный с хвостиком крюка, и механизм управления поворотом крюка СП . Недостаткомданного устройства является низкая надежность работы. Цель изобретения - повьппение надежности работы. Указанная цель достигается тем, что в устройстве для автоматической застропки и отстропки грузов с жесткими петлями, содержащем раму по крайней мере с одним поворотным захватным крюком и направляющей, в которой расположен ползун, кинематически связанный с хвостовиком крюка и механизм управления поворотом крюка, поворотный захватный крюк шарнирно закреплен на ползуне и снаб жен установленным на хвостовике пальцем, расположенным параллельно оси поворота крюка, а направляющая выполнена с фигурным пазом в боковой стенке, в котором расположен палецj при этом механизм управления поворотом крюка включает в себя звездочку, шарнирно прикрепленную к направляюще и размещенную в ее пазу с возможностью взаимодействия с папьцем крюка, и размещенный на оси звездочки эксцентрик для возврата ее в исход ное положение. На фиг. 1 изображено устройство д автоматической застропки и отстропки грузов с жесткими петлями в транспор ном положении без груза, общий вид; на фиг. 2 - то же, в положении,, когд оно опущено до опирания о груз; на фиг. 3 - то же, в положении после за стропки груза; на фиг. 4 - разрез Ана фиг. 3; на фиг. 5 - устройство в положении перед отстропкой груза. Устройство для автоматической застропки и отстропки грузов с жесткими петлями содержит несущую раму 1 на которой в соответствии с расположением петель захватываемого груза закреплены захватные приспособления, каждое из которых состоит из жестко закрепленной на раме 1 направляющей 2, входящего в нее ползуна 3 с шарнирно закрепленным посредством оси 4 захватным крюком 5, имеющим хвостовик 6 с жестко закрепленным на нем пальцем 7. В направляющей 2 выполнен фигурный паз 8, в который входит звездочка 9, пгарнирно соединенная посредством оси 10 с планкой 11, (Жестко закрепленной на направляющей 2. На оси 10, жестко соединенной со звездочкой 9, закреплен эксцентрик 12, который прижимает своим весом концы зубьев звездочки 9 к поверхности фигурного паза 8. Палец 7 хвостовика 6взаимодействует с фигурным пазом 8, в который он входит, и со звездочкой 9. На ползуне 3 жестко закреплены упоры 13 и 14, взаимодействующие с упором 1.5, жестко закрепленным в направляющей 2, а также центрирующий упор 16, который вместе с упором 14 взаимодействует с внутренней поверхностью направляющей 2. В ползуне 3 выполнен паз 17, разделяющий его конец на две части 18 и 19,являющиеся опорньми. Устройство работает следующим образом. Раму 1 наводят на груз так, чтобы его петли .попапи в пазы 17 ползунов 3. При этом каледое захватное приспособление находится в положении, показанном на фиг. 1, крюк 5 отведен в сторону и не мешает прохождению петли 20 груза в паз 17. После опирания ползуна 3 на груз при дальнейшем опускании захвата направляющая 2 перемещается относительно ползуна 3 и крюка 5, при этом палец 7, перемещаясь в зазоре между звездочкой 9 и фигурньм пазом 8, через хвостовик 6 поворачивает захватный крюк 5 вокруг оси 4. Это происходит до тех пор,-пока палец 7 не упрется в звездочку 9(фиг. 2). Затем раму 1 поднимают вверх. При этом в каждом захватном приспособлении направляющая 2 перемещается вверх, а палец 7, перемещаясь в зазоре между звездочкой 9 и фигурным пазом 8, поворачивает захватный, крюк 5 вокруг оси 4. При упирании звездочки 9 в палец 7она отклоняется, пропуская палец 7 в крайнее положение, а затем, под действием веса эксцентрика 12, возвращается в исходное положение до упора в поверхность фигурного паза 8. После того, как палец -7 займет крайнее правое положение (фиг. 3 и 4) и крюк 5 полностью перекроет паз 17, замкнув в нем петлю 20, при дальнейшем подъеме устройства упор 15 упирается в упор 14 и ползун 3, поднимаясь вверх, через ось 4 поднимает крюк 5, который будучи введенным в петлю 20 поднимает за нее груз. Поскольку положение пальца 7 при этом зафиксировано фигурным пазом 8, самооткрьтание крюка 5 исключено. При опускании груза устройство опускается на него опорными частями 18 41 19 ползуна 3, направляющая 2 продолжает опускаться.до тех пор, пока упор 13 не упрется в упор 15 (фиг. 5). При перемещении направляющей 2 относительно ползуна 3 палец 7 перемещаясь в зазоре между звездочкой 9 и фигурным пазом 8, через хвостовик J6 поворачивает захватный крюк 5 вокруг оси 4. При упирании пальца 7 в.звездочку 9 последняя отклоняется, пропуская палец 7 в крайнее верхнее положение, а затем, под.действием
веса эксцентрика 12, возвращается в исходное положение до упора в поверхность фигурного паза 8. -Затем раму 1 поднимают вверх. В результате этого в каждом захватном приспособлении направляющая 2 перемещается вверх, а палец 7, перемещаясь в зазоре между звездочкой 9 и фигурным пазом 8, поворачивает захватный крюк 5 вокруг оси 4 до тех пор, пока палец не займет крайнее левое положение, а крюк 5 не выйдет из петли 20 и паза 17. При. этом упор 15 упирается 13 упор 14 (фиг. 1), и при дальнейшем подъеме устройство, находящееся в исходном положении беспрепятственно снимается с груза.
Предлагаемое устройство надежно в работе, так как положение поворотных захватных крюков при подъеме груза зафиксировано, перемещение петель груза ограничено пазом в ползуне, а непредвиденная отстропка груза исключена.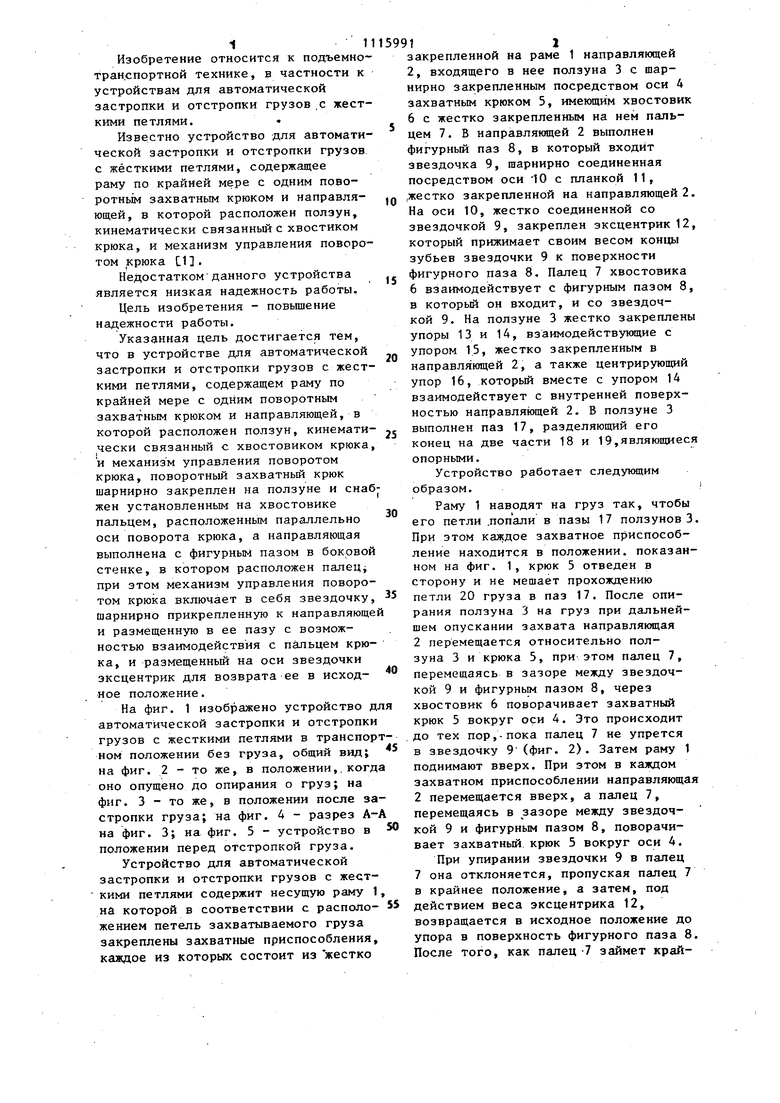
| название | год | авторы | номер документа |
|---|---|---|---|
| Канатный зажимной грузозахват | 1989 |
|
SU1773842A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| Строповочный замок | 1980 |
|
SU933603A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Грузозахватное устройство | 1983 |
|
SU1122603A1 |
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| Грузозахватное устройство | 1990 |
|
SU1751139A1 |
| АВТОСТРОП ДЛЯ ЗАХВАТА КОНТЕЙНЕРОВ | 2008 |
|
RU2387596C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО для КОНТЕЙНЕРОВ | 1971 |
|
SU315682A1 |

УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ЗАСТРОПКИ И ОТСТРОПКИ ГРУЗОВ С ЖЕСТКИМИ ПЕТЛЯМИ, содержащее раму по крайней мере с одним поворотным з хбатным крюком и направлякхцей, в которой расположен ползун, кинематически связанный с хвостовиком крюка, и механизм управления поворотом крюка, отличающееся тем, что, с целью повышения надежности работы, поворотныхзахватный крюк шарнирно закреплен на ползуне и снабжён установле .ным на. хвостовике пальцем, расположенным параллельно оси поворота крюка, а направляющая выполнена с фигурным пазом в боковой стенке, в котором расположен палец, при этом механизм управления поворотом крюка включает в себя звездочку, шарнирно прикрепленную к направляющей и размещенную в ее пазу с возможностью взаимодействия с пальцем крюка, и размещенный на оси г (О звездочки эксцентрик для возврата ее в исходное положение.
А-А
Фигл
иг.5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматической застропки и отстропки универсальных контейнеров | 1977 |
|
SU686974A2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
