зубьями 3 втулки 2 и поворачивают упор 6, а вместе с ним через штифты 16 захватный орган 9 на угол, близкий к 90°. Окончательный доворот захватного органа 9 до 90° происходит при подъеме устройства за счет взаимодействия зубьев 10 с зубьями 5 на втулке 4. Обойма 18 и шарики 19 служат для исключения передачи крутящеИзобретение относится к грузозахватным устройствам, предназначенным преимущественно для захвата грузов, снабженных фигурной головкой.
Цель изобретения - повыщение надежности работы устройства.
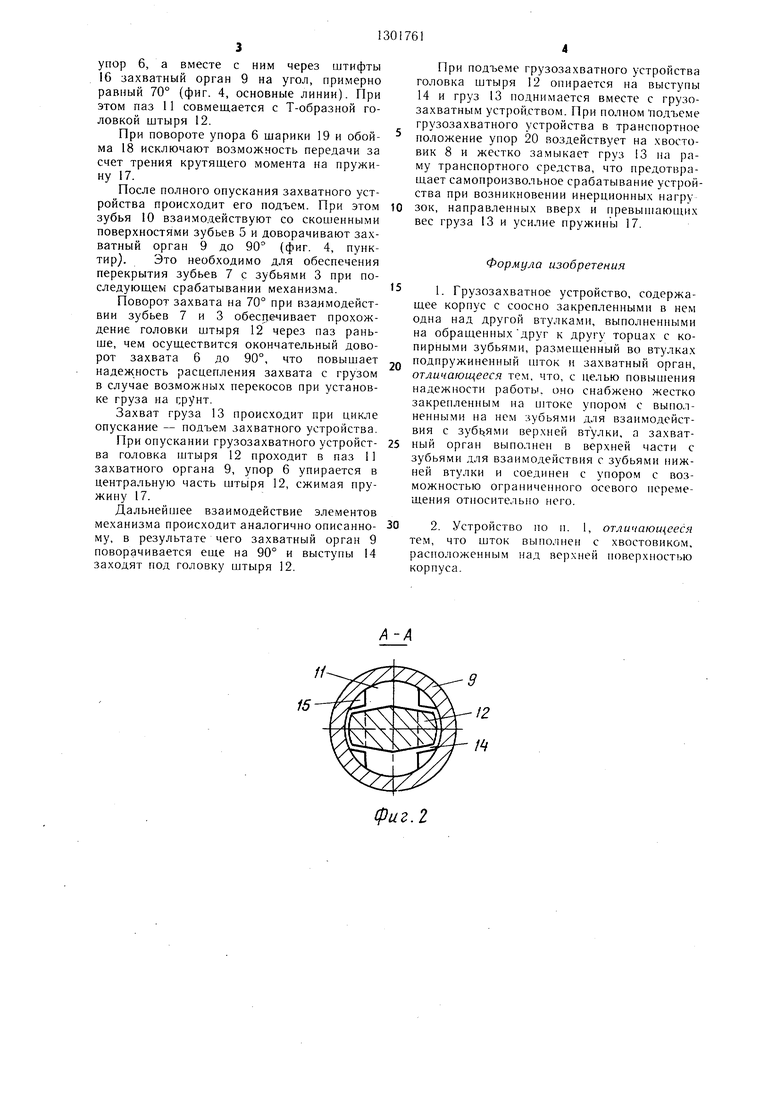
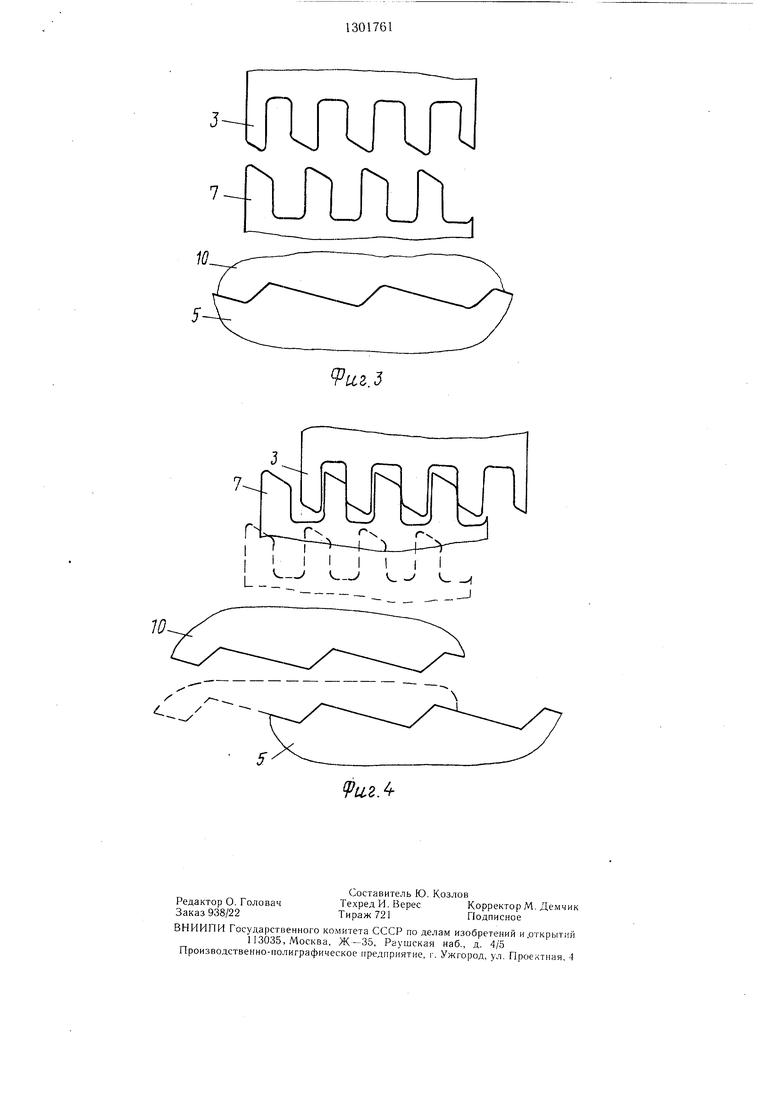
На фиг. 1 изображено грузозахватное устройство в исходном положении, разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - развертка по зубьям в транспортном (исходном) положении; на фиг. 4 - то же, в момент сжатия пружины на величину рабочего хода.
Грузозахватное устройство содержит корпус 1, в котором неподвижно установлены верхняя втулка 2 с четырьмя зубьями 3 и нижняя втулка 4 с четырьмя зубьями 5. Зубья 3 и 5 смещены относительно друг друга (фиг. 3 и 4). В корпусе 1 с возможностью осевого перемещения и вращения установлен упор 6 с зубьями 7, соответствующими зубьям 3. Упор б жестко скреплен с хвостовиком 8, проходящим через отверстие в верхнем торце корпуса 1.
Соосно упору 6 установлен захватный орган 9, снабженный зубьями 10, входящими в зацепление с зубьями 5. В нижнем торце захватного органа 9 выполнен паз (вырез) 11 по форме головки штыря 12, закрепленного на грузе 13. Паз 11 образован выступами 14, на опорных поверхностях которых имеются буртики 15, образующие углубление под головку штыря 12.
В захватном органе 9 установлены штиф- 1Ъ1 6, входящие в пазы упора 6, которые не препятствуют перемещению в осевом на- 11рав, 1ении захватного органа 9 и упора 6 относиre. ibHO друг друга, но обеспечивают передачу крутящего момента от упора 6 на захватный орган 9. Указанное взаимодействие может быть реализовано с помощью щлицов. щпопок и т. п.
Величина перемещения упора 6 относительно захватного органа 9 превышает суммарную величину высоты буртиков 15 и допуска на высоту Т-образной головки 1пты- ря 12.
го момента от пружины 17 на упор 6.
8результате разворота захватного органа
9на 90° при подъеме устройства головка штыря 12 проходит через вырез 1 зах- Езатного органа 9, и груз 13 остается на земле. Захват груза 13 происходит при опускании - подъеме за счет поворота захвата еще на 90°. 13 п. ф-лы, 4 ил.
На унор 6 воздействует пружина 17 сжатия, которая через обойму 18 и шарики 19 поджимает упор б к центральной части штыря 12. Головка последнего в транспортном положении опирается на выступы 14 захватного органа 9 и через поверхности зубьев 10, 5 и нижнюю втулку 4 на корпус 1, а пружина 17 выбирает зазор .между верхней поверхностью головки штыря 12
и упором 6.
Таким образом, обеспечивается зажим головки штыря 12 и безлюфтовое соединение груза 13 с грузозахватным устройством. На раме транспортного средства, относительно которой осуи1ествляется подъем к
опускание грузозахватного устройства, установлен СООСНО хвостовику 8 регулируемый yFiop 20, отрегулированный так, что в транспортном положении, т. е. поднятом вверх к раме транспортного средства грузозахватном устройстве, ограничивает возможное перемещение хвостовика 8 в осевом направлении.
Устройство работает с.аедующим образом.
При транспортировке груза 13 головка
щтыря 12 опирается на выступы 14 захватного органа 9 и удерживается от поворота буртиками 15, а от осевого перемеп1ения -- упором 6, хвостовик 8 которого взаимодействует с упором 20 на раме транспортного средства. Зубья 10 взаимодействуют с зубьями 5, между зубьями 7 и 3 имеется
зазор (фиг. 3).
При опускании захватного устройства хвостовик 8 отходит от упора 20.
При соприкосновении с опорной поверхностью груза 13 головка штыря 12 и упор
6останавливаются, а корпус 1 вместе с захватным органом 9 продолжает движение
вниз, сжимая пружину 17. Буртики 15 опускаются ниже опорной поверхности головки штыря 12.
При дальнейгпем перемеп1ении вниз корнуса 1 зубья 10 захвата 9 выходят из
зацепления с зубьями 5 втулки 4, а зубья
7упора б входят в соприкосновение с зубьями 3 втулки 2 и за счет взаимодействия наклонных поверхностей поворачивают
упор 6, а вместе с ним через штифты 16 захватный орган 9 на угол, примерно равный 70° (фиг. 4, основные линии). При этом паз 11 совмещается с Т-образной головкой штыря 12.
При повороте упора 6 шарики 19 и обой- ма 18 исключают возможность передачи за счет трения крутяш,его момента на пружину 17.
После полного опускания захватного устройства происходит его подъем. При этом зубья 10 взаимодействуют со скошенными поверхностями зубьев 5 и доворачивают захватный орган 9 до 90° (фиг. 4, пунктир). Это необходимо для обеспечения перекрытия зубьев 7 с зубьями 3 при последующем срабатывании механизма.
Поворот захвата на 70° при взалмодейст- вии зубьев 7 и 3 обеспечивает прохождение головки штыря 12 через паз раньше, чем осуществится окончательный дово- рот захвата 6 до 90°, что повышает надежность расцепления захвата с грузом в случае возможных перекосов при установке груза на г,рунт.
Захват груза 13 происходит при цикле опускание - подъем захватного устройства.
При опускании грузозахватного устройст- ва головка штыря 12 проходит в паз 11 захватного органа 9, упор 6 упирается в центральную часть штыря 12, сжимая пружину 17.
Дальнейп ее взаимодействие элементов механизма происходит аналогично описанно- му, в результате чего захватный орган 9 поворачивается еш,е на 90° и выступы 14 заходят под головку штыря 12.
При подъеме грузозахватного устройства головка штыря 12 опирается на выступы 14 и груз 13 поднимается вместе с грузозахватным устройством. При полном подъеме грузозахватного устройства в транспортное положение упор 20 воздействует на хвостовик 8 и жестко замыкает груз 13 на раму транспортного средства, что предотвращает самопроизвольное срабатывание устройства при возникновении инерционных нагру зок, направленных вверх и превышающи.ч вес груза 13 и усилие пружины 17.
Формула изобретения
1.Грузозахватное устройство, содержащее корпус с соосно закрепленными в нем одна над другой втулками, выполненными на обращенных друг к другу торцах с ко- пирными зубьями, размещенный во втулках подпружиненный шток и захватный орган, отличающееся тем, что, с целью повышения надежности работы, оно снабжено жестко закрепленным на штоке упором с выполненными на нем зубьями для взаимодействия с зубь,ями верхней втулки, а захватный орган выполнен в верхней части с зубьями для взаимодействия с зубьями нижней втулки и соединен с упором с возможностью ограниченного осевого перемещения относительно него.
2.Устройство но н. I, отличающееся те.м, что шток выполнен с хвостовиком, расположенным над верхней поверхностью корпуса.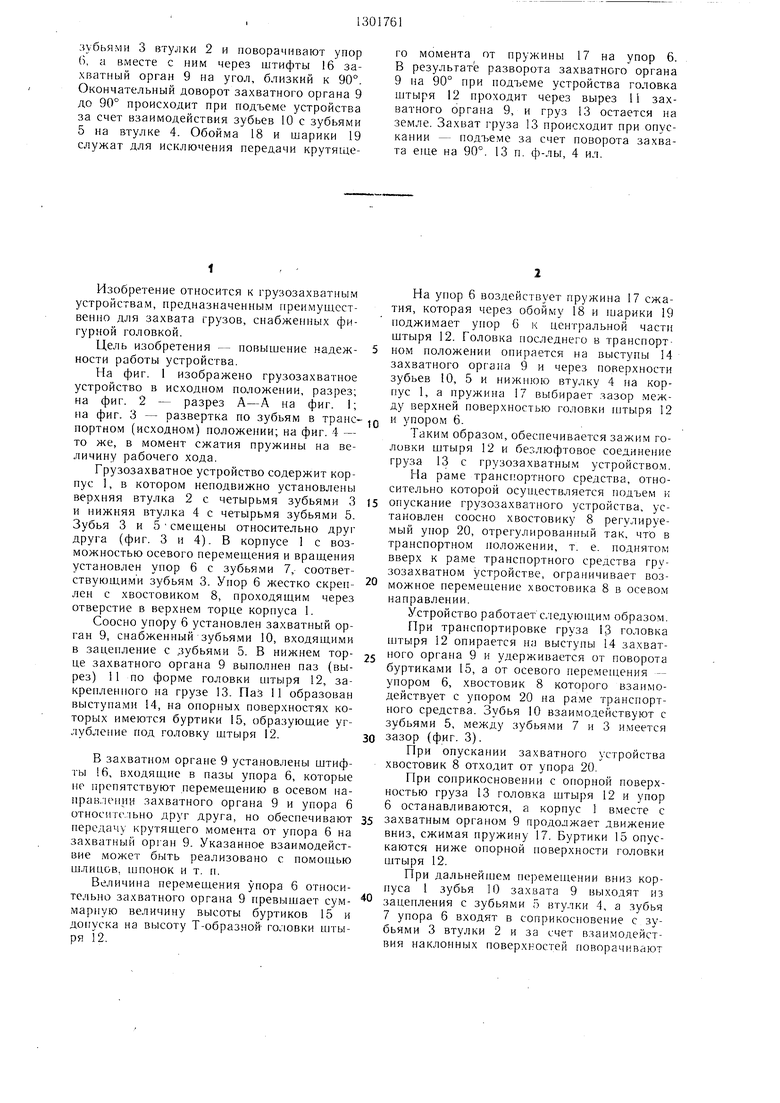
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для грузов со штырем и фигурной головкой | 1986 |
|
SU1525110A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захватное устройство для грузов с фигурной головкой | 1987 |
|
SU1525111A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Захват для изделий | 1979 |
|
SU918246A1 |
| Захват-кантователь для цилиндрических грузов с буртиками | 1985 |
|
SU1375553A1 |
| Захватное устройство для грузов со штырем и фигурной головкой | 1987 |
|
SU1636319A2 |
| Захватное устройство для грузов с головкой | 1987 |
|
SU1519996A1 |
| Контейнер для сыпучих грузов | 1980 |
|
SU982986A1 |
| Подвеска грузозахватного устройства | 1983 |
|
SU1119967A1 |
Изобретение относится к области подъемно-транспортного машиностроения. Целью изобретения является повышение надежности работы устройства. Грузозахватное устройство содержит корпус 1, в котором неподвижно установлены втулка 2 с зубьями 3 и втулка 4 с зубьями 5. В корпусе 1 с возможностью аксиального перемещения и вращения установлены упор 6 с зубьями 7 и хвостовиком 8 и захватный орган 9 с зубьями 10, имеющий вырез 11 по форме головки штыря 12, закрепленного на грузе 13, и выступы 14 с буртиками 15. Захватный орган 9 взаимодействует с упором 6. На упор 6 воздействует пружина сжатия 17 через обойму 18 и шарики 19. На раме транспортного устройства нанротив хвостовика 8 упора 6 установлен регулируемый упор 20. Нри транспортировке груза 13 щтырь 12 опирается на выступы 14 захватного органа 9 и удерживается от перемещений буртиками 15 и упором 6, хвостовик которого взаимодействует с упором 20 на раме транспортного устройства. При опускании устройства хвостовик 8 отходит от упора 20. При соприкосновении груза 13 с землей корпус 1 продолжает движение вниз, при этом выступы 14 с буртиками 15 опускаются ниже нижней поверхности штыря 12, а зазор между верхней поверхностью П1тыря 12 и головкой выбирается. При дальнейшем перемещении зубья 7 входят в соприкосновение с (€ сл 00 с
//
фиг.2
9uz.
Редактор О. Головач Заказ 938/22
ВНИИПИ Государствениого комитета СССР по делам изобретений и.открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная. 4
Фиг.
Составите.чь Ю. Козлов
Техред И. ВересКорректор М.
Тираж 721Подписное
| УСТРОЙСТВО ДЛЯ ФИЗИОТЕРАПИИ ЖИВОТНЫХ | 1994 |
|
RU2048821C1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
