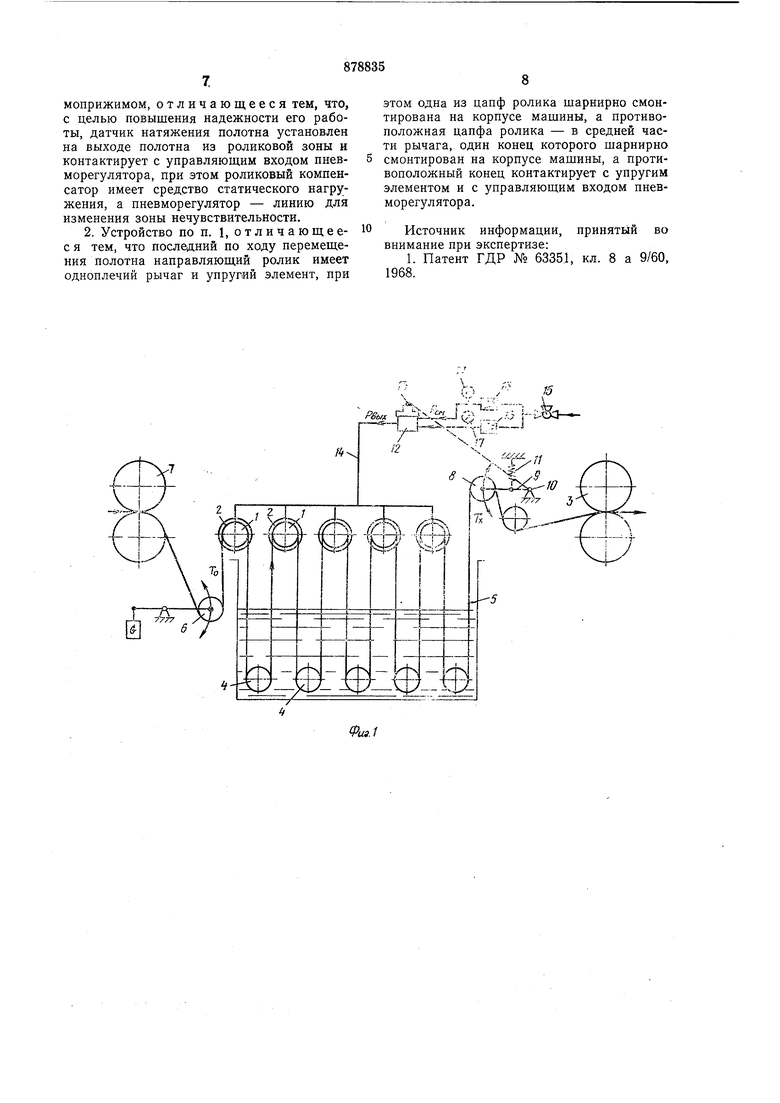
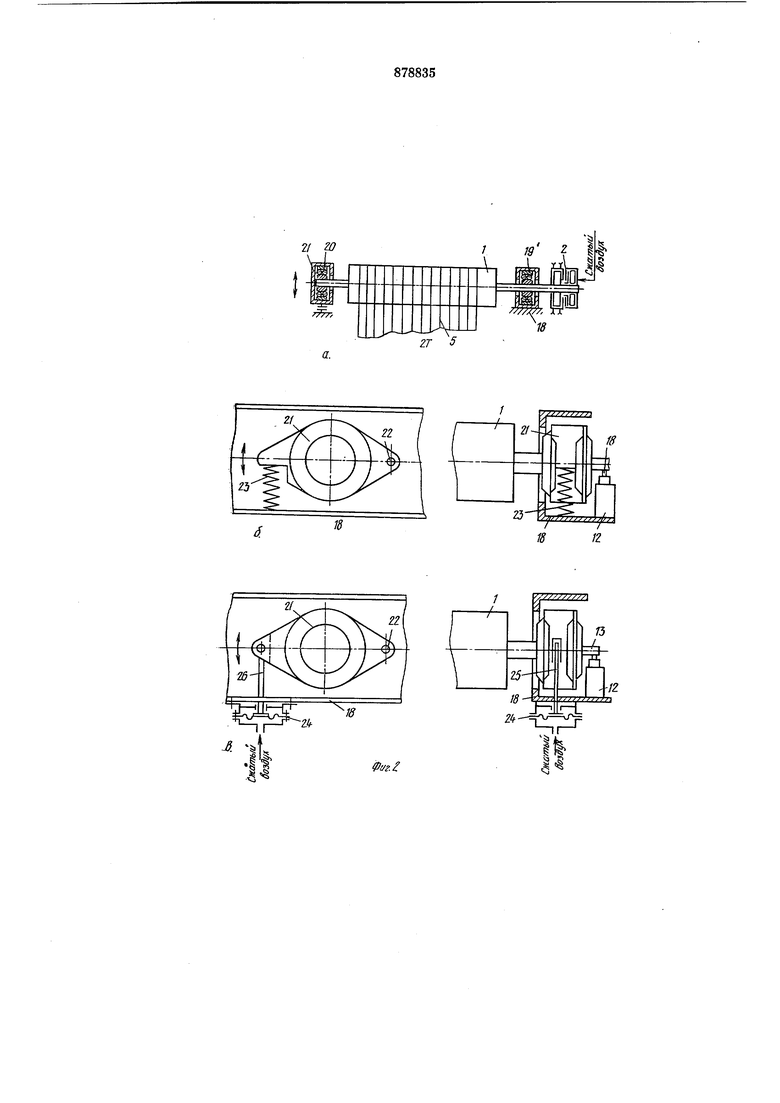
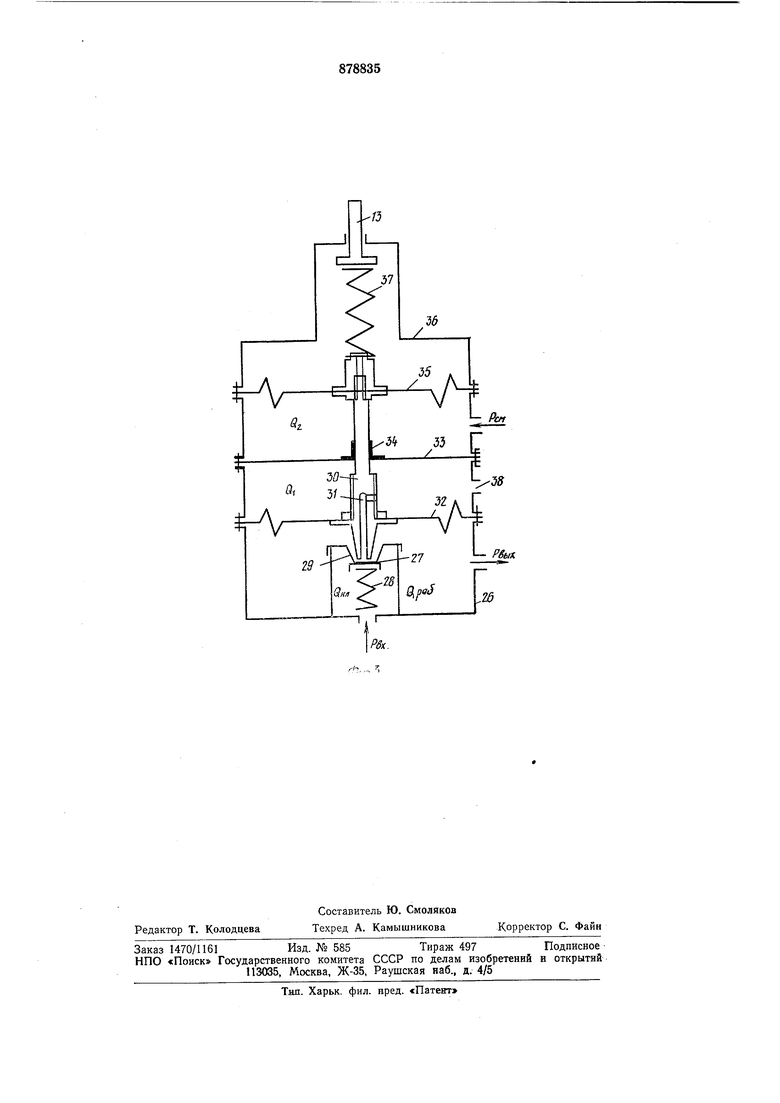
Последний по ходу перемещения полотна направляющий ролик имеет одноплечий рычаг и упругий элемент, при этом одна из цапф ролика щарнирно смонтирована на корпусе машины, а противоположная цапфа ролика - в средней части рычага один конец которого шарнирно смонтирован на корпусе машины, а противоположный конец контактирует с упругим элементом и с управляющим входом пневморегулятора. На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - датчик, вариант исполнения; на фиг. 3 - схема ппевморегулятора. Устройство для регулирования натяжения текстильного полотна в отделочной машине содержит приводные направляющие ролики 1, приводящиеся во вращение через фрикционные муфты 2 с пневмоприжимом от привода последующей тянульной пары 3, нижние направляющие ролики 4, приводящиеся в движение движущимся полотном 5. Ролики 1 и 4 образуют многороликовую зону обработки. На входе полотна в многороликовую зону обработки установлен роликовый компенсатор 6, при помощи которого задается натяи еняе полотна Го «а входе в многороликовую зону, а также производится согласование скоростей тянульных пар 7 и 3, при этом роликовый компенсатор имеет средство статического «агружеиия. На выходе полотна из многороликовой зоны установлен датчик натяжения, представляющий собой ролик 8, установленный на рычагах 9 с возможностью поворота под действием натяжения полотна относительно оси 10, не проходящей через продольную ось ролика 8. Для возвращения ролика 8 в исходное положение при натяжении полотна, равном нулю, служит пружина И. Датчик натяжения связан с пневморегулятором 12, который имеет нажимной шток 13. Выход пневморегулятора 12 соединен пневмолинией 14 с пневмоприжимами фрикционных муфт 2. Нодвод сжатого воздуха к пневморегулятору 12 производит ся из магистрали через трехходовый кран 15 и редуктор 16 давления. Контроль давления сжатого воздуха производится по манометру 17. В другом варианте в качестве датчика натяжения используется последний направляющий ролик 1 многороликовой зоны. Со стороны привода ролик 1 шарнирно закреплен на корпусе 18 мащины, например, с помощью двухрядного сферического шарикоподшипника 19. Другой конец ролика 1 при помощи двухрядного сферического щарикоподшипиика 20 закреплен в середине рычага 21. Рычаг 21 с одной сто роны щарнирно на пальце 22 закреплен на корпусе 18 мащины так, что может совместно с концом ролика 1 поворачиваться относительно пальца 22. С другой стороны рычаг 21 опирается на пружину 23, укрепленную на корпусе 18 мащины. Вместо пружины 23 может быть использован пневмоцилиндр 24. В этом случае одна сторона рычага 21 шарнирно связана со штоком 25 пневмоцилиндра 24, закрепленного на корпусе 18. ПневморегуЛятор 12 состоит из корпуса 26, в котором расположен клапан 27, подпружиненный пружиной 28, седла 29 клапана, штока 30 клапана, имеющего внутри капал 31, мембраны 32, закрепленной в центре на нижней части щтока 30 клапана, жесткой перегородки 33, закрепленной в корпусе 26 и имеющей в центре отверстие с уплотнительным элементом 34 для прохода щтока 30 клапана, дополнительной мембраны 35, закрепленной в центре на верхнем конце щтока клапана, крышки 36, пружины 37 и нажимного штока 13. Корпус 26 и седло клапана 29 образуют камеру клапана Q.;,, в которую подается сжатый воздух из питающей пневмоЛИНИИ РВ. Корпус 26 пневморегулятора и мембрана 32 образуют рабочую камеру Qpag, которая сообщается с пневмолинией, идущей на исполнительиые элементы (в данном случае, на пневмоприжимы фрикционных муфт), и давление сжатого воздуха в которой РВЫХКорпус 26, мембрана 32 и жесткая перегородка 33 образуют камеру Qi, сообщающуюся с атмосферой через отверстие 38. Корпус 26, жесткая перегородка 33 и дополнительная мембрана 35 образуют дополнительную камеру Q2, в которую подается сжатый воздух регулируемого давления РС„. Дополнительная камера Qa при подаче сжатого воздуха является линией для дистанционного изменения зоны нечувствительности пневморегулятора. Устройство работает следующим образом. Транспортировка текстильного полотна производится тянульными парами 3 и 7, приводящимися во вращение от индивидуальных электродвигателей, и направляющими роликами 1. При этом скорость транспортировки полотна обуславливается скоростью вращения тянульных пар 3 и 7. Направляющие ролики 1 приводятся во вращение от привода тянульной пары 3 с опережением 6-10% по приведенной окружной скорости валов тянульной пары 3. Натяжение полотна То на входе в многороликовую зону обработки задают роликовым компенсатором 6, фрикционные муфты работают со скольжением, и величину передаваемого муфтами 2 на ролики I крутящего момента регулируют при помощи пневмоприжимов, прижимающих ведомые части муфт к ведущим.
При отсутствии сжатого воздуха в пневмоприжимах фрикционных муфт 2, последние не сцеплены и не передают вращающий момент на ролики 1, а ролики 4 вращаются под действием движения полотна. Проходя по роликам 1 и 4, полотно получает дополнительное приращение натяжения, обусловленное сопротивлением движению полотна в жидкости, трением при вращении роликов 4 в опорах и в жидкости. Под действием иатяжения полотна 5 ролик 8 перемещается вниз, воздействуя на шток J3 пневморегулятора 12. На выходе пневморегулятора 12 появляется сжагый воздух, давление РВЫХ которого () пропорционально величине перемещения штока 13 пневморегулятора .12. По пневмолинии 14 сжатый воздух подается в пневмоприжимы фрикционных муфт 2, происходит сцепление фрикционных муфт 2, которые начинают передавать на ролики 1 крутящие моменты. Ролики .1 начинают тянуть полотно 5, компенсируя приращение натяжения полотна на этом участке. При этом натяжение TI восходящей на ролик ветви полотна и натяжение Га нисходящей с ролика ветви полотна будут разными, причем разность будет зависеть от величины крутящего момента, передаваемого на ролик 1 фрикционной муфтой 2. При включении фрикционных муфт 2 натяжение полотна в конце многороликовой зоны уменьшится, и ролик 8 датчика натяжения под действием пружины И переместится вверх, одновременно изменяя положение связанного с ним штока ДЗ пневморегулятора .12. Давление ежатого воздуха на выходе пневморегулятора РВЫХ. а также в пневмоприжимах фрикционных муфт 2 будет уменьшаться. Перемещение ролика 8 и связанное с ним изменение давления сжатого воздуха РВЫХ в пневмоприжимах фрикционных муфт 2 будет происходить до тех пор, пока величина натяжения полотна на выходе его из многороликовой зоны не будет соответствовать величине натяжения полотна заданной настройки пневморегулятора 12, в зависимости от артикула полотна. При этом крутящие моменты, передаваемые муфтами 2 на ролики 1, будут компенсировать моменты сопротивления движению полотна в многороликовой зоне.
Дистанционное изменение задания величины натяжения полотна производится изменением зоны нечувствительности пневморегулятора 12. Для этого в дополнительную камеру Q2 подается сжатый воздух, давление которого регулируется редуктором 16 давления.
Дополнительная мембрана 35 вместе с ме.мбраной 32 будет противодействовать
перемещению штока 30 клапана к клапану 27. Изменяя Яс„ (дистационно), можно изменять РВЫХ и тем самым изменять величины крутящих моментов, передаваемых фрикционными муфтами с пневмоприжимом на ролики 1 и 4. Изменяя РСМ при сохранении РВЫХ const, изменяют Т - величину натяжения полотна, задаваемую датчиком натяжения. Давление сжатого воздуха РСМ можно изменять дистанционно. Для обеспечения необходимого закона изменения натяжения полотна вдоль многороликовой зоны обработки компенсатором 6, задают 1кеобходи1мое -натяжение То в начале зоны обработки, а при помощи датчика натяжения и пневморегулятора задают величину натяжения Т в конце зоны обработки.
Датчик натяжения по другому варианту исполнения работает следующим образом.
При отсутствии натяжения полотна рычаг 21 удерживается в среднем положении пружиной 23 или штоком 25 пневмоцилиндра 24. Под действием двойного натяжения полотна 5 (натяжение на двух ветвях полотна) неприводной конец ролика 1 перемещается по дуге относительно пальца 22, при этом рычаг 21 также поворачивается относительно пальца 22, По мере поворота рычага 21 он нажимает концом на пружину 23, а выступом 25 воздействует на шток 13 пневморегулятора 12. При этом изменяется давление сжатого воздуха на выходе из пнейморегулятора и подаваемого в пневмоприжимы фрикционных муфт 2. В дальнейшем работа датчика натяжения аналогична работе датчика по первому варианту.
Предложенное устройство позволит обрабатывать ткани с малым натяжением, что особенно важно для тканей с легкодеформируемой структурой, обработка которых проводится при температурах, близких к .100° С и выше, позволит поддерживать заданное натяжение тканей при обработке, менять натяжение при смене артикула ткани, уменьшить вытяжку ткани и улучшить ее качество.
Формула изобретения
1. Устройство для регулирования натяжения текстильного полотна в отделочной машине, содержащее установленные по ходу перемещения полотна по меньшей мере два ряда направляющих роликов, опетливаемых полотном, в одном из которых ролики связаны посредством фрикционных муфт с пневмоприжимом, а в других рядах установлены на осях свободно, смонтированный на входе полотна в роликовую зону роликовый компенсатор и датчик натяжения полотна, связанный с пневморегулятором, соединенным с пневмоприжимом, отличающееся тем, что, с целью повышения надежиости его работы, датчик натяжения полотна установлен на выходе полотна из роликовой зоны и контактирует с управляющим входом пневморегулятора, при этом роликовый компенсатор имеет средство статического нагружения, а пневморегулятор - линию для изменения зоны нечувствительности.
2. Устройство по п. 1, от л и ч а ющеес я тем, что последний по ходу перемещения полотна направляющий ролик имеет одноплечий рычаг и упругий элемент, при
этом одна из цапф ролика шарнирно смонтирована на корпусе машины, а противоположная цапфа ролика - в средней части рычага, один конец которого шарнирно смонтирован на корпусе машины, а противоположный конец контактирует с упругим элементом и с управляющим входом пневморегулятора.
Источник информации, принятый во внимание при экспертизе:
1. Патент ГДР № 63351, кл. 8 а 9/60, 1968.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обработки полотна давлением | 1966 |
|
SU219542A1 |
| Устройство для прижима шлифовальной ленты к поверхности обрабатываемых плоских деталей | 1985 |
|
SU1273234A1 |
| ПОТОЧНАЯ ЛИНИЯ для ПРОИЗВОДСТВА ОБРЕЗИНЕННОГОКОРДА | 1969 |
|
SU235982A1 |
| МАШИНА ДЛЯ ОБРАБОТКИ ТКАНИ ЖИДКИМ АММИАКОМ | 1973 |
|
SU384214A1 |
| Установка для аргонодуговой сварки поворотных стыков труб неплавящимся электродом с подачей присадочной проволоки | 1990 |
|
SU1776528A1 |
| ПОЛУАВТОМАТИЧЕСКИЙ ЗАДАТЧИК | 1967 |
|
SU201792A1 |
| ГИДРОПНЕВМАТИЧЕСКИЙ ТАРАН | 2012 |
|
RU2511775C9 |
| Машина для сортировки и упаковки чулок | 1984 |
|
SU1308664A1 |
| Растворонасосная установка | 1980 |
|
SU989132A1 |
| Способ нанесения полимерного материала на длинномерный текстильный рукав и установка для его осуществления | 1989 |
|
SU1705117A1 |
v.;, /«
/%х. .:kJ( ---Г:,.г.,С.,
7
-f-.;/
ч - --/ 9
т
2/
/xVA
I Ю 2
II
18
2118
ГZ5Л
Zit
Ф1/.г
