(54) УСТРОЙСТВО ДЛЯ ПЕРЕНОСКИ ПАКЕТА АРМАТУРЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1982 |
|
SU1090640A1 |
| Устройство для перегрузки изделий | 1982 |
|
SU1065316A1 |
| УСОВЕРШЕНСТВОВАННОЕ УСТРОЙСТВО МЕХАНИЗИРОВАННОЙ РАСКЛАДКИ ЖЕЛЕЗНОДОРОЖНЫХ ШПАЛ НА БАЛЛАСТНЫЙ СЛОЙ | 2020 |
|
RU2745765C1 |
| Стенд для ремонта рам тележек грузовых вагонов | 1985 |
|
SU1328230A1 |
| Склад для хранения штучных грузов | 1981 |
|
SU977303A1 |
| Устройство для пакетирования и обвязки предметов | 1982 |
|
SU1079548A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1999 |
|
RU2188290C2 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Поточная линия для сборки и сварки листов в полотнища | 1976 |
|
SU647090A1 |
| Установка для прессования шашек из взрывчатого вещества групповым способом | 1970 |
|
SU1841255A1 |


1
Изобретение относится к промышленности строительных материалов и может быть использовано при производстве железобетонных изделий с предварительно напряженной арматурой.
Известно устройство для переноски пакета арматуры, содержащее направляющие, закрепленные на вертикальных стойках, установленных на основании, установленные на направляющие грузовые тележки с поворотными рычагами для захвата гребенок с арматурой, механизмы для перемещения грузовых тележек и поворотных рычагов н систему управления.
Недостатки известного устройства - больщая трудоемкость и малая автоматизация.
Цель изобретения - снижение трудоемкости и повышение автоматизации процесса.
Указанная цель достигается тем, что в устройстве содержащем направляющие, закрепленные на вертикальных стойках, смонтированных на основании, установлены на направляющие грузовые тележки с поворотными рычагами для захвата гребенок с арматурой, механизмы лля перемещения грузовых тележек и поворотных рычагов и
систему управления, которая из грузовых тележек снабжена вертикальными направляющими и кареткой с приводом, пер еме щающаяся по этим направляющим, причем поворотные рычаги смонтированы на карет-ке.
При этом, привод подъема каретки выполнен в виде зубчатореечной передачи.
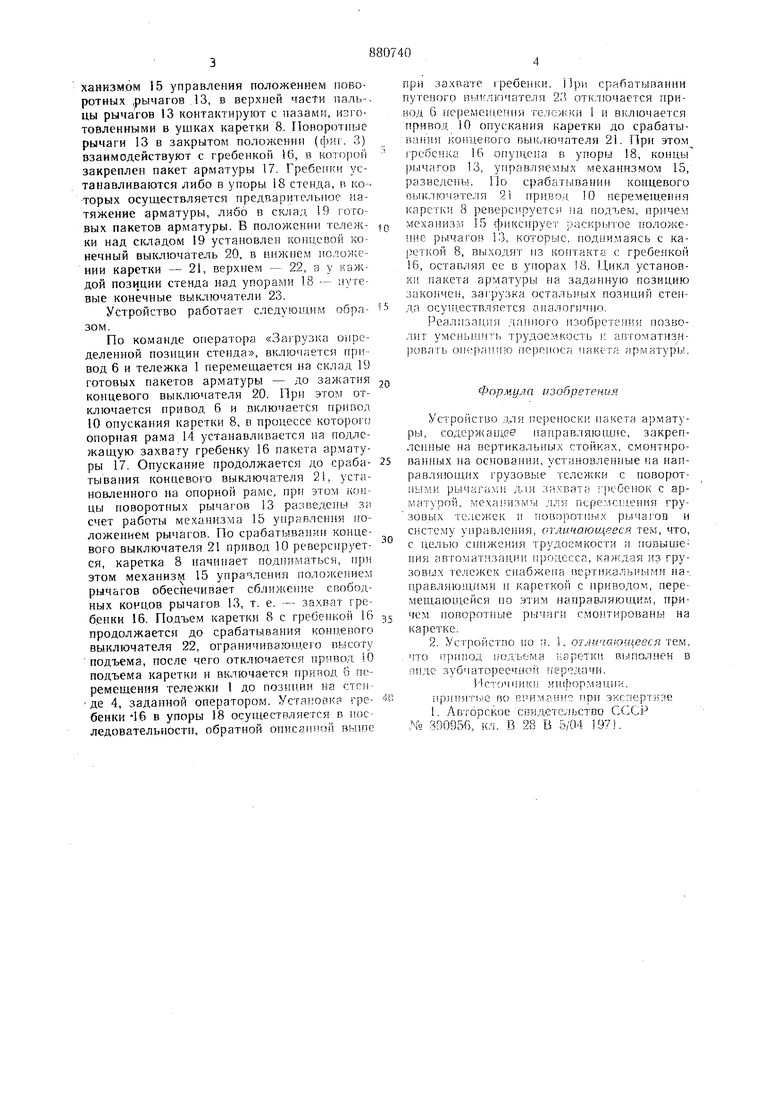
На фиг. I изображено предлагаемое устройство, общий вид; на фиг. 2 - то же вид в плане; на фкг. 3 - узел I на фиг. I; на фиг. 4 - вид А на фиг. 3.
Устройство содержит тележки 1 с катками 2, установленные на путях 3, укрепленные на расположенных вдоль торцов стенда 4 опорах 5 и приводы 6 перемещения тележеК 1. Тележки 1 снабжены вертикальными направляющими 7, в которых установлены каретки 8, контактирующие с вертикальными направляющими 7 катками 9 и снабженные приводом 10 подъема каретки 8, на выходных валах которого установлены шестерни 11, взаимодействующие с зубчатыми рейками 12, установленными на вертикальных направляющих 7. Каретка 8 снабжена также поворотными рычагами 13, щарннрно связывающими ее с опорной рамой 14 и механкзм.ом 15 управления положением поворотных .рычагов. 13, в верхней части паль-, цы рычагов 13 контактируют с пазами, изготовленными в ушках каретки 8. оворот1 ые рычаги 13 в закрытом положении (фиг. 3} взаимодействуют с гребенкой 6, в котором закреплен пакет арматуры 17. Гребенки устанавливаются либо в упоры 18 стенда, в ко торых осуществляется предварительное iiaтяжение арматуры, либо в склад 19 готовых пакетов арматуры. В положении тележки над складом 19 установлен концевой конечный выключатель 20, в нижнем поло.:ении каретки - 21, верхнем - 22, а у каждой позиции стенда над упорами 18 - путевые конечные выключатели 23.
Устройство работает следуощим образом.
По команде оператора «За1рузка определенной позиции стенда, включается привод 6 и тележка 1 перемещается на склад 19 готовых пакетов арматуры - до зажатия концевого выключателя 20. При это.т отключается привод 6 и включается привод 10 опускания каретки 8, в процессе которого опорная рама 14 устанавливается на подлежащую захвату гребенку 16 пакета арматуры 17. Опускание продолжается до срабатывания концевого выключателя 21, установленного на опорной раме, при этом KOIJцы поворотных рычагов 13 разведены ,;i счет работы механизма 15 управления положением рычагов. По срабатыва} ии концевого выключателя 21 привод 10 реверсируется, каретка 8 начинает под1П 1латься, при этом механизм 15 управления поло;-кепием рычагов обеспечивает сближение свободных концов рычагов 13, т. е. - захват гребенки 16. Подъем каретки 8 с гребе кой 16 продолжается до срабатывания концевого выключателя 22, ограничивающего гл-лсоту подъема, после чего отключается привод Ш подъема каретки и включается привод 6 перемещения тележки 1 до позип,ии на стен де 4, заданной оператором. Устакоока гребенки -16 в упоры 18 осуществляется в последовательности, обратной описапиоп вьиме
при захвате гребенки, ilpn срабатывании путевого выключателя 2Л отключается привод б iiepeNiesn.eHnH тележки 1 и В1слючается привод 10 опускания каретки до срабатывания KOFraeF oro зы,ключателя 21. При этом
|-рсбс ка 16 в упоры 18, концы jibiMaroB 13, управляемы.х механизмом 15, разведены. По срабатывании концевого выключате.ля 21 при.вол 10 1еремещепия каретки 8 реверсируется sia подъем, причем
механизм 15 фиксирует раскрытое положение рычагов 13, которые, поднимаясь с ка| еткой 8, выходят из контакта с гребенкой б, оставляя ее в упорах 18. Цикл установки пакета арматуры на заданную позицию закончен, загрузка осталыгых позиций стенда осуиг,ествляется а11алогично.
Реализации /laFiiioro изобретении позволит умеиыип -ь трудоемкость i: автоматизировать on-Miaiuno переноса пакета арматуры.
Формула изобретения
й
Устройство для переноски пакета арматуры, содержап ее направляющие, закреплешгые на вертикальных стойках, смонтирова}|ных на осюваиии, устано зле1 НЬ е яа направляющих грузовые тележки с поворотiibiMH рычагам д.:1Я захвати rj)e6eiiOK с арматурой, .механизмы для псремс1п, гру зовых тележек и поворотных рычагов и систему управле1 ия, отличающееся тем, что, с 1елью снижения трудоемкости м попышеиия автомат 1заци1 прогресса, каждая из грузовых тележек снабжена иертикальныл - на-. цравл пощим 1 и кареткой с приводом, перемеш.аюи1.ейся по .этим направляющим, причем поворотные рьгчнги с.молтированы на каретке.
HcTCiMiiHKH (1)ормацпк, пршятые во ггима -п 5 гфи экспертизе
5
3 /f.
8
11//
jj
фиг.Ц
