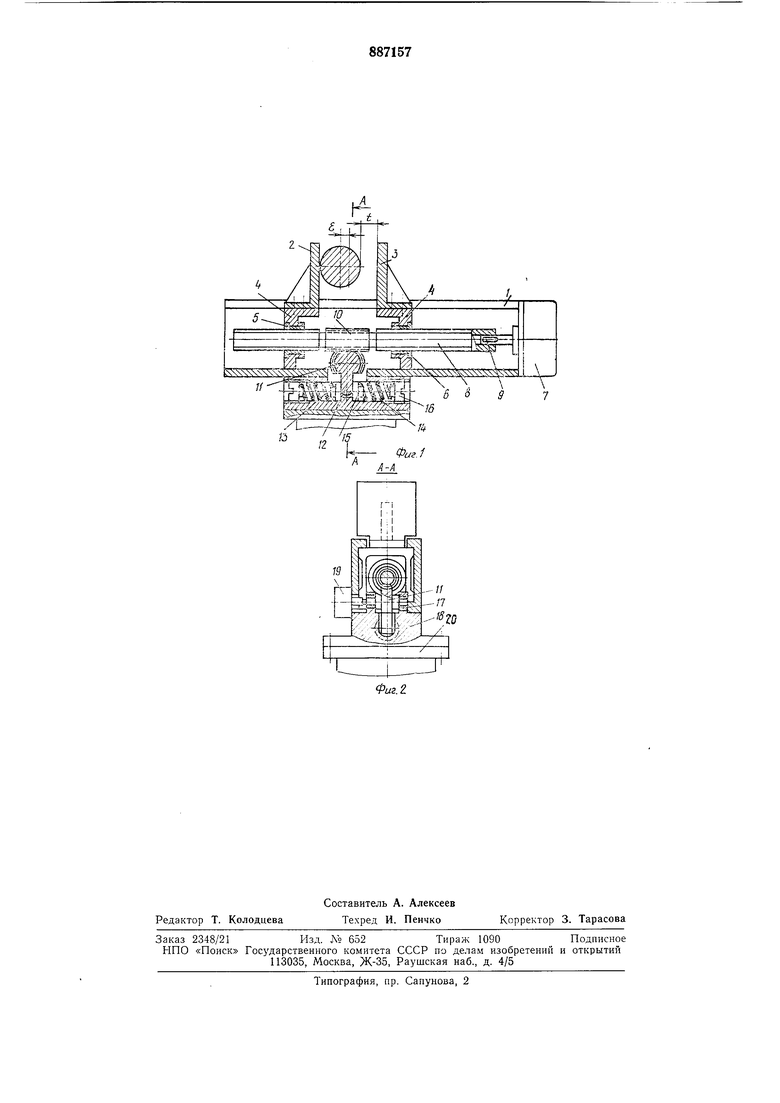
устанавливается на опорах 17 скольжения в основание 18 и соединено с валом датчика 1У обратной связи, выполненного, например, потенциометрическим. Основание 18 захвата крепится к фланцу 20 руки промышленiioro робота,
Захват промышленного робота работает следующим образом.
При подаче команды на сжатие зажимных губок захвата включается привод 7, вращающий ходовой винт 8. При взаимодействии ходового винта 8 с гайками 5 и 6, запрессованными в основание 4 губок, крутящий момент преобразуется в ноступательное нараллельпое перемещение зажимных губок 2 и 3 в направляющих корпуса 1 захвата. Так как ходовой винт 8 имеет участки с разным направлением винтовых линий самотормозящих резьб, с которыми взаимодействуют гайки 5 и 6, то возникающие при вращении ходового винта 8 в резьбовых нарах осевые составляющие силы направлены в противоположные стороны и уравновещивают друг друга, при этом ходовой винт 8 не меняет своего осевого положення. В том случае, если между губками 2 и 3 находится какой-нибудь предмет и он расположен симметрично относительно зажимных губок, они начинают его обжимать. Прн этом усилие распределяется равномерно на обе губки и они надежно схватывают манипулируемый предмет. С датчика 19 обратной связи в систему управления промыщленным роботом управляющий сигнал не поступает. В случае неточной ориентации зажимных губок относительно манипулируемого предмета одна из губок, например зажнмная губка 2 (см. фиг. 1), касается поверхности предмета первой и останавливается. При дальнейшем вращении выходного вала привода 7 ходовой винт 8 начнет ввинчиваться в гайку 5 и будет перемещаться в осевом направлении, при этом зажимная губка 3 будет перемещаться с удвоенной скоростью до касания с поверхностью манипулируемого предмета, после чего произойдет надежный захват предмета. Передача крутящего момента от привода 7 к ходовому винту 8 при его осевом перемещении осуществляется за счет подвижного щпоночного соединения со щпонкой 9. Осевое смещение ходового винта 8 воспринимается датчиком 19 обратной связи при помощи круговой зубчатой рейки и входящего с ней в зацепление зубчатого колеса 11, установленного на опорах 17 скольжения и соединенного с валом датчика 19, который выдает в систему управления сигнал, пропорциональный разности относительных перемещений зажимных губок. При этом направление вращения датчика 19 обратной связи определяет, в какую сторону смещен от оси симметрии захвата
манипулируемый предмет, а абсолютное значенне величины, снимаемой с датчика обратной связи в виде, например, аналогового сигнала, соответствует расстоянию t (см. фиг. 1), равному увеличенному вдвое значению эксцентриситета s. Система управления устраняет автоматически эту погрешность при дальнейшей работе, вводя коррекцию в программу работы робота.
При повороте зубчатого колеса 11 рычаг 12, выполненный совместно с колесом, онираясь на подвижную опору 15, сжимает 14. При разжиме манипулируемого предмета привод 7 вращается в нанравлении, противопололшом направлению вращения при сжатии. Залшмная губка 2 будет оставаться при разжиме (см. фиг. 1) неподвижной до тех пор, пока ходовой винт 8 не займет нод действием пружины 14 своего исходного положения, после чего обе зажимные губки 2 и 3 будут перемещаться до своих конечных положений, определяемых концевыми выключателями (на чертежах концевые выключатели не показаны). При ностунлении в систему управления сигналов от двух концевых выключателей предельного положения зажимных губок и отсутствии сигнала с датчика обратной связи можно считать, что захват находится в исходном состоянии и готов к дальнейщей работе. Величина усилия нружнн 13 и 14 сжатия регулируется винтами 16.
Р1зобретение позволяет упростить конструкцию промыщленного робота и повысить точность позиционирования.
Формула изобретения
1.Захват промышленного робота, содержандий корпус, зажимные губки, размещенные в этом корпусе, систему управления и привод зажимных губок, связанный с ними посредством ходового винта, отличающ н и с я тем, что, с целью повышения точности позиционирования н упрощения конструкции, он снабжен датчиком обратной связи, зубчато-реечной передачей с круговой рейкой, причем датчик обратной связи электрически связан с системой управления н механически - с зубчатым колесом зубчато-реечной нередачи, а рейка зубчатореечной передачи л естко связана с ходовым винтом, который установлен с возможностью иеремещения вдоль своей оси.
2.За.хват по н. 1, отличающийся тем, что колесо зубчато-реечной передачи нодпружипено относительно корнуса захвата.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР N° 503714, кл. В 25J 15/00, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Захват промышленного робота | 1980 |
|
SU891435A1 |
| Захват промышленного робота | 1981 |
|
SU963852A1 |
| САМОЦЕНТРИРУЮЩЕЕ ЗАЖИМНОЕ УСТРОЙСТВО | 1994 |
|
RU2088396C1 |
| Захватное устройство | 1989 |
|
SU1646858A1 |
| Захват | 1980 |
|
SU937140A1 |
| Кисть механической руки промышленногоРОбОТА | 1979 |
|
SU841961A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Узел осевой подачи заготовки к устройству для непрерывного гидропрессования изделий | 1988 |
|
SU1668003A1 |