(54) ЗАХВАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Захват промышленного робота | 1980 |
|
SU887157A1 |
| Захват промышленного робота | 1980 |
|
SU891435A1 |
| Кисть механической руки промышленногоРОбОТА | 1979 |
|
SU841961A1 |
| Многопозиционный захват промышленного робота | 1987 |
|
SU1491701A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Головка манипулятора | 1983 |
|
SU1085807A1 |
| Устройство для сборки деталей | 1979 |
|
SU917994A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |
Изобретение относится к машиностроению и приборостроению и предназначено для использования в манипуляторах и промышленных роботах, применяемых для выполнения подъемно-транспортных, монтажно-сборочных и технологических операций.
Известны захваты промышленных роботов, содержащие корпус и зажимные губки, установленные на рычагах, связанных с электромагнитным приводом 1.
Недостатком захвата является узость технологических возможностей, связанная с отсутствием индивидуального привода губок.
Известен также захват промышленного робота, содержащий корпус и сменные зажимные губки, закрепленные на рычага.ч, связанных с установленными на корпусе модулями, имеюшими приводы 2.
Недостатками захвата являются ограниченный диапазон размеров зажимаемых деталей, невозможность использования захвата для зажима деталей, форма и размеры которых значительно изменяются в процессе обработки и ограниченный класс зажимаемых деталей (длинные тонкие трубки).
Цель изобретения - расширение технологических возможностей.
Поставленная цель достигается тем, что модули закрепле1 ы на корпусе захвата с возможностью регулировочных перемешений, а приводы модулей выполнены электромагнитными и снабжены поворотны.ми якорями.
Кроме того, корпус захвата выполнен в виде балки прямоугольного сечения, по плоскостям которой образованы направляющие пазы для регулируемого креаления двух и более модулей и направляющие пазы для регулируемого крепления корпуса захвата с фланцем руки робота.
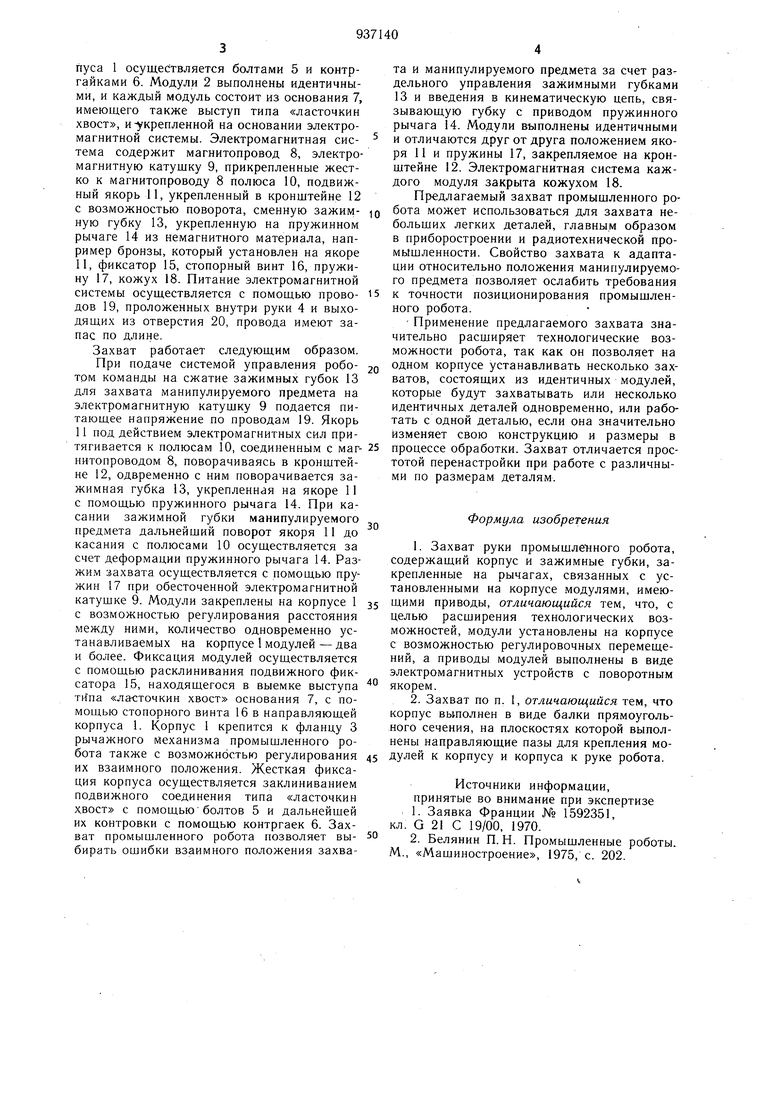
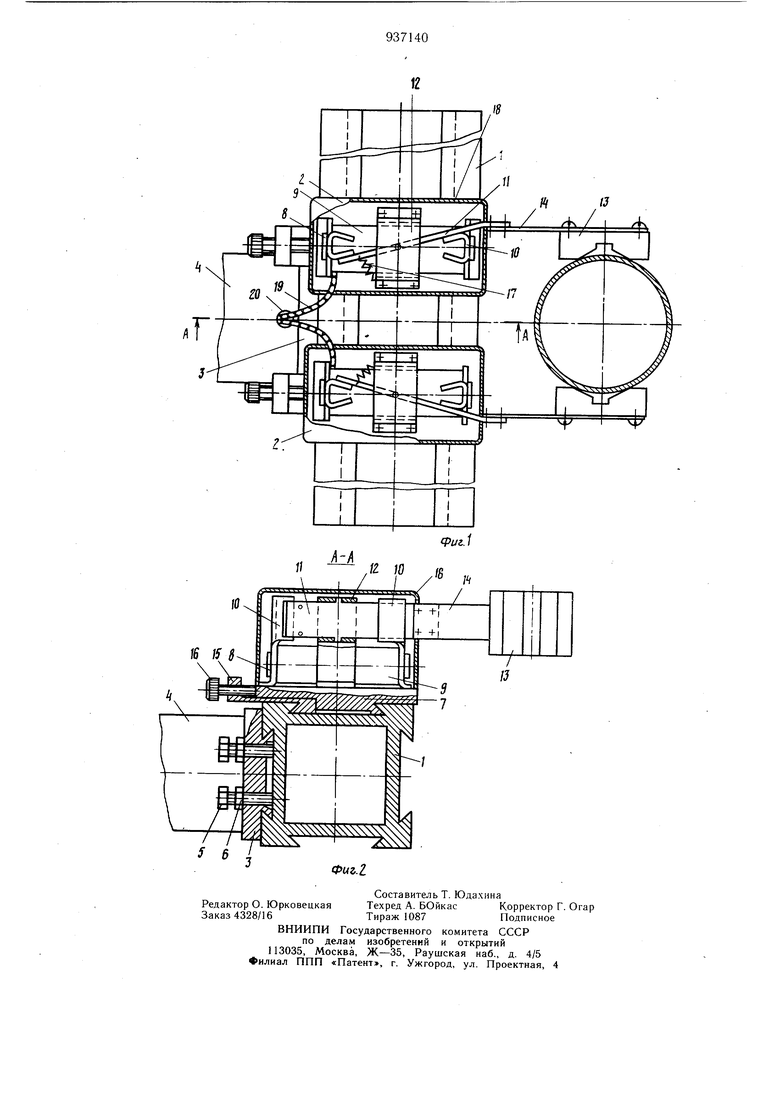
На фиг. 1 изображен предлагаемый захват, вид в плане, на фиг. 2-разрез А-А на фиг. 1.
Захват промышленного робота состоит из корпуса 1, выполненного в виде балки прямоугольного сечения, в направляюиаих кото2Q рой с возможностью регулировки расстояния между ними закреплены два и более модуля 2. Корпус 1 крепится к фланцу 3 руки 4 промышленного робота, который имеет выступ типа «ласточкин хвост, входящий в одну из направляющих корпуса. Фиксация корliyca 1 осуществляется болтами 5 и контргайками 6. Модули 2 выполнены идентичными, и каждый модуль состоит из основания 7, имеющего также выступ типа «ласточкин хвост, и-укрепленной на основании электромагнитной системы. Электромагнитная сиетема содержит магнитопровод 8, электромагнитную катущку 9, прикрепленные жестко к магнитопроводу 8 полюса 10, подвижный якорь 11, укрепленный в кронщтейне 12 с возможностью поворота, сменную зажимную губку 13, укрепленную на пружинном рычаге 14 из немагнитного материала, например бронзы, который установлен на якоре 11, фиксатор 15, стопорный винт 16, пружину 17, кожух 18. Питание электромагнитной системы осуществляется с помощью проводов 19, проложенных внутри руки 4 и выходящих из отверстия 20, провода имеют запас по длине.
Захват работает следующим образом.
При подаче системой управления роботом команды на сжатие зажимных губок 13 для захвата манипулируемого предмета на электромагнитную катущку 9 подается питающее напряжение по проводам 19. Якорь И под действием электромагнитных сил притягивается к полюсам 10, соединенным с магнитопроводом 8, поворачиваясь в кронщтейне 12, одвременно с ним поворачивается зажимная губка 13, укрепленная на якоре 11 с помощью пружинного рычага 14. При касании зажимной губки манипулируемого предмета дальнейщий поворот якоря 11 до касания с полюсами 10 осуществляется за счет деформации пружинного рычага 14. Разжим захвата осуществляется с помощью пружин 17 при обесточенной электромагнитной катущке 9. Модули закреплены на корпусе 1 с возможностью регулирования расстояния между ними, количество одновременно устанавливаемых на корпусе 1 модулей - два и более. Фиксация модулей осуществляется с помощью расклинивания подвижного фиксатора 15, находящегося в выемке выступа типа «ласточкин хвост основания 7, с помощью стопорного винта 16 в направляющей корпуса 1. Корпус 1 крепится к фланцу 3 рычажного механизма промыщленного робота также с возможностью регулирования их взаимного положения. Жесткая фиксация корпуса осуществляется заклиниванием подвижного соединения типа «ласточкин хвост с ПОМОЩЬЮболтов 5 и дальнейщей их контровки с помощью контргаек 6. Захват промышленного робота позволяет выбирать ошибки взаимного положения захвата и манипулируемого предмета за счет раздельного управления зажимными губками 13 и введения в кинематическую цепь, связывающую губку с приводом пружинного рычага 14. Модули выполнены идентичными и отличаются друг от друга положением якоря 11 и пружины 17, закрепляемое на кронщтейне 12. Электромагнитная система каждого модуля закрыта кожухом 18.
Предлагаемый захват промыщленного робота может использоваться для захвата небольщих легких деталей, главным образом в приборостроении и радиотехнической промышленности. Свойство захвата к адаптации относительно положения манипулируемого предмета позволяет ослабить требования к точности позиционирования промыщленного робота.
Применение предлагаемого захвата значительно расщиряет технологические возможности робота, так как он позволяет на одном корпусе устанавливать несколько захватов, состоящих из идентичных модулей, которые будут захватывать или несколько идентичных деталей одновременно, или работать с одной деталью, если она значительно Изменяет свою конструкцию и размеры в процессе обработки. Захват отличается простотой перенастройки при работе с различными по размерам деталям.
Формула изобретения
Источники информации, принятые во внимание при экспертизе
