Изобретение относится к машиностроению и может быть использовано в манипуляторах и робототехнич ских устройствах.
Целью изобретения является увеличение надежности захвата деталей.
На чертеже изображена схема захвата промьшленного робота.
Захват промышленного робота сое- тоит из корпуса 1, зажимных губок 2 и 3, соединенных с ним с помощью шарнирных многозвенников, выполненных из ведущих звеньев 4 и тяг 5, Каждое ведущее звено составляет единое целое с блоками 6 и 7, имеющими зубчатые венцы. Блоки 6 и 7 установлены в корпусе 1 на неподвижных осях 8 и 9 с возможностью проворота. В корпусе 1 расположен поршень 10 со штоком 11. На штоке 11 закреплен суммирующий механизм, состоящий из двух зубчатых блоков 12 и 13, имеющих возможность проворота вокруг осей 14 и 15. Блок 13 является натяжным и имеет возможность продольного перемещения относительно блока. 12 посредством механизма натяжения, представляющего из себя пружинный механизм. На зубчатые блоки 12 и 13 надет замкнутый гибкий зубчатый элемент 16 с наружными и внутренними зубьями, который своими горизонтальными ветвями входит в зацепление с зубчатыми венцами блоков 6 и 7. На блоке 13 жестко закреплен флажок 17, подпружиненный с обеих сторон пружинами 18 и 19. Регулировка жесткости пружин осуществляется регулировочными узлами 20 и 21. Для надежного зацепления гибкого элемента 16 с блоками 6 и 7 установлены направляющие 22 и 23. Корпус 1 имеет полость подвода рабочей среды 24 и силовой цилиндр 25.
Захват промьш1ленного робота работает следующим образом.
Рабочая среда, поступая в полость 24 силового цилиндра 25, перемещает поршень 10 со штоком 11. Шток 11 перемещает суммирующий механизм с блоками 12 и 13, а также гибкий элемент 16 в сторону силового цилиндра 25. Гибкий элемент 16 своими прямолинейными участками вращает блоки 6 и 7 в направлении, противоположном друг другу, заставляя губки 2 и 3 соверВЮШПИ Заказ 2258/ lJ7
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
Тираж 953 Подписное
шать взаимно параллельное движение навстречу друг другу. Когда одна из губок, например 2, касается поверхности детали, она останавливается и
останавливает блок 6. Блоки 12 и 13 продолжают поступательное движение, при этрм гибкий элемент 16 начинает обегать блоки 12 и 13, проворачивая их, заставляя блок 7 продолжать вращение с удвоенной скоростью до касания губкой 3 детали. Происходит зажим детали. При этом при вращении блока 13 флажок 17 отклоняется в сторону, сжимая пружину 19 и растягивая
пружину 18. При снятии детали с оснастки пружины 18 и 19 возвращают флажок 17с блока 13 в исходное положение. Блок 13 через зубчатое зацепление вращает гибкий элемент, который вращает блок 12 и блоки 6 и 7, заставляя губки 2 и 3 занимать положение, при котором ось зажимаемой детали совпадает с осью захвата.
После снятия давления рабочей среды в полости 24 (соединение ее с атмосферой) силового цилиндра 25 поршень 10 со штоком 11 перемещается в сторону губок за счет пружины, расположенной в силовом цилиндре. При
этом суммирующий механизм перемещается в сторону губок и прямолинейными ветвями гибкого- элемента 16 вращает блоки 6 и 7, которые разводят губки 2 и 3 от детали, освобождая последшою.
Формула изобретения
1.Захват промьшшенного робота, содержащий корпус, ведущие звенья,
тяги, зажимные губки, привод в виде силового цилиндра и суммируюш 1й механизм с гибким элементом, отличающийся тем, что, с целью увеличения надежности захвата деталей, суммирующий механизм выполнен в виде двух подпружиненных относительно друг друга блоков с надетым на них кольцевым гибким элементом, взаимодействующим с ведущими звеньями захвата.
2.Захват поп.1,отличаю- щ и и с я тем, что гибкий элемент суммирующего механизма выполнен в виде двухсторонней зубчатой ленты,
а все блоки - в виде зубчатых колес.
Тираж 953 Подписное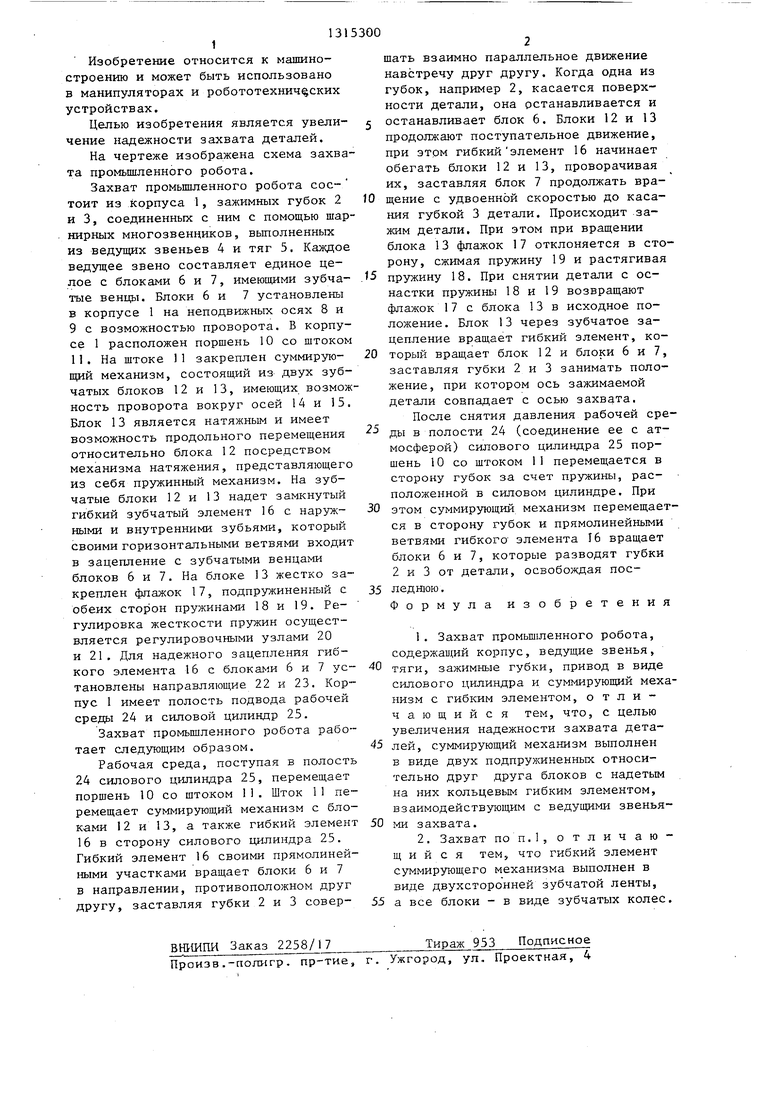
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1981 |
|
SU963852A1 |
| Захват промышленного робота | 1983 |
|
SU1114550A2 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Захват робота | 1980 |
|
SU889422A1 |
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |
| Захват манипулятора | 1990 |
|
SU1834796A3 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Захват | 1976 |
|
SU558789A1 |
| Захват | 1975 |
|
SU662345A1 |
| Захват промышленного робота | 1986 |
|
SU1316816A1 |
Изобретение относится к машиностроению и может быть использовано в манипуляторах и робототехнических устройствах. Целью изобретения является расширение технологических возможностей захвата за счет компенса- цаи. величины рассогласования между осью захвата и осью детали. Захват промьпЕленного робота состоит из корпуса 1, зажимных губок 2 и 3, соединенных с ним с помощью шарнирных многозвенников, выполненных из ведущих звеньев 4 и тяг 5. Каждое ведущее звено составляет единое целое с блоками 6 и 7, установленными в корпусе 1 на осях 8 и 9. На штоке 11 привода закреплен суммирующий механизм, состоящий из двух подпружиненных между собой блоков 12 и 13. БЛо- ки 12 и 13 связаны между собой гибким элементом 16, взаимодействующим с блоками 6 и 7. На одном из блоков суммирующего механизма установлен механизм позиционирования деталей относительно оси захвата, состоящий из флажка 17 .и пружин 18 и 19. 1 . 3,п. ф-лы, 1 ил. сл сд 00
| Захват промышленного робота | 1983 |
|
SU1114550A2 |
