1
Изобретение относится к машиностроению, а именно к устройствам для контроля линейного пе)еме1иения рабочих органов металлорежущих станков.
По основному авт. св. № 795731 известно устройство для измерения положения рабочего органа станка, содержащее роторный датчик, соединенный с приводным винтом и преобразователь, показывающий величину переменления, а также дополнительный .чатчик, выдающий сигнал о трогании с места рабочего органа, причем выходы роторного датчика и датчика трогания соединены со входами элемента И, выход которого соединен со входом преобразователя 1.
Недостатком этого устройства является. сложность, так как датчик трогания рабочего органа включает в себя безлюфтовую передачу рейка - колесо и роторный датчик.
Цель изобретения - упрощение конструкции устройства.
Поставленная цель достигается тем, что датчик, выдаюишй сигнал о трогании с места рабочего органа станка, выполнен в виде установленного на корпусе гайки рычага.
взаимодействующего одним концом с нарезкой винта, а другим - с конечным выключателем.
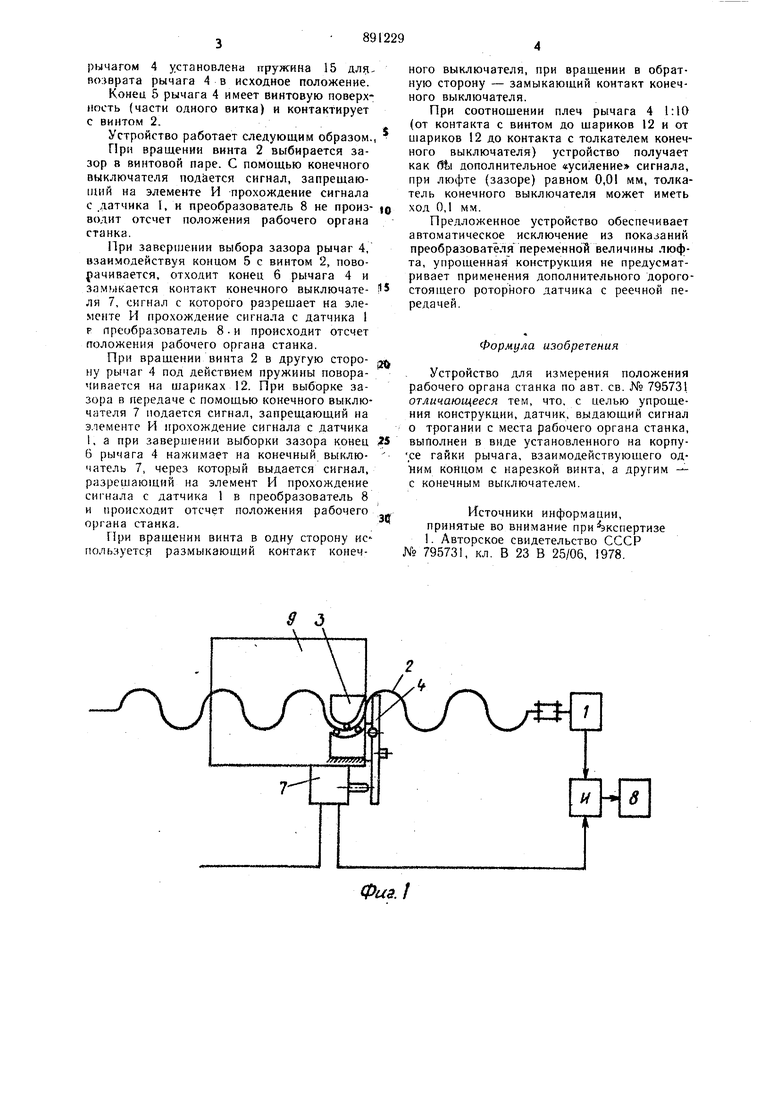
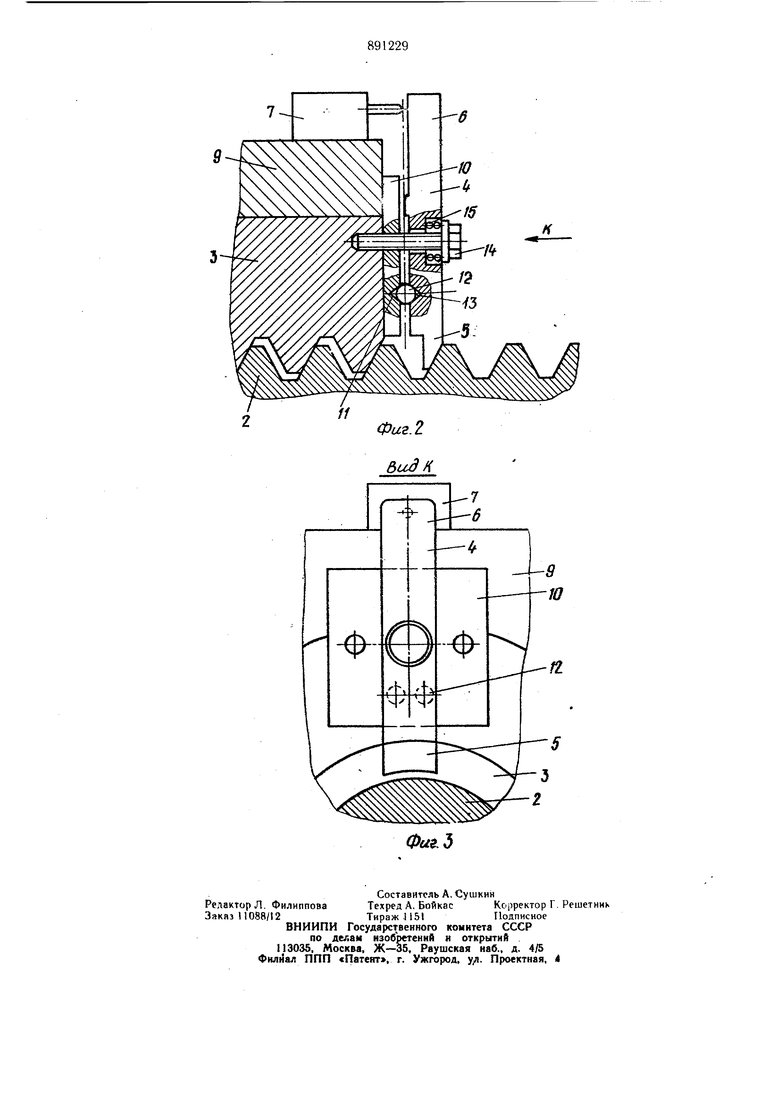
На фиг. 1 показана структурная схема , устройства; на фиг. 2 - датчик трогания с места рабочего органа, общий вид; на фиг. 3 - то же, вид К.
Устройство содержит роторный датчик I, установленный на конце приводного винта 2. взаимодействующего с гайкой 3.
На корпусе гайки 3,. установлен рычаг Q 4, взаимодействующий одним концом 5 с нарезкой винта 2, а другим концом 6 - с конечным выключателем 7. Выходы датчика 1 и конечного выключателя 7 электрически соединены с входами логического элемента И, выход которого соединен с преобразователем 8. Передача винт 2 -- гайка 3 приводит в движение рабочий орган 9 станка.
К корпусу гайки 3 крепится планка 10
с двумя лунками II, в которые вставлены
шарики 12. На шариках 12 может повора29 рычаг 4, на котором имеются две
идентичные лункам 11 лунки 13.
Рычаг 4 крепится к корпусу гайки 3 болтом 14. Между головкой болта 14 и рычагом 4 установлена пружина 15 длявозврата рычага 4 в исходное положение. Конец 5 рычага 4 имеет винтовую поверхность (части одного витка) и контактирует с винтом 2. Устройство работает следующим образом. При вращении винта 2 выбирается зазор в винтовой паре. С помощью конечного выключателя подается сигнал, запрещающий на элементе И прохождение сигнала с .датчика I, и преобразователь 8 не производит отсчет положения рабочего органа станка. При завср1иении выбора зазора рычаг 4, взаимодействуя концом 5 с винтом 2, поворачивается, отходит конец б рычага 4 и замыкается контакт конечного выключателя 7, сигнал с которого разрешает на элементе И прохождение сигнала с датчика 1 F преобразователь 8 и происходит отсчет положения рабочего органа станка. При вращении винта 2 в другую сторону рычаг 4 под действием пружины поворачивается на щариках 12. При выборке зазора в передаче с помощью конечного выключателя 7 подается сигнал, запрещающий на элементе И прохождение сигнала с датчика I. а при завершении выборки зазора конец 6 рычага 4 нажимает на конечный выключатель 7, через который выдается сигнал, разрешающий на элемент И прохождение сигнала с датчика 1 в преобразователь 8 и происходит отсчет положения рабочего органа станка. При вращении винта в одну сторону ис пользуете размыкающий контакт конечного выключателя, при вращении в обратную сторону - замыкающий контакт конечного выключателя. При соотиощении плеч рычага 4 1:10 (от контакта с винтом до щариков 12 и от щариков 12 до контакта с толкателем конечного выключателя) устройство получает как дополнительное «усиление сигнала, при люфте (зазоре) равном 0,01 мм, толкатель конечного выключателя может иметь ход 0,1 мм. Предложенное устройство обеспечивает автоматическое исключение из показаний преобразователя переменной величины люфта, упрощенная конструкция не предусматривает применения дополнительного дорогостоящего роторного датчика с реечной передачей. Формула изобретения Устройство для измерения положения рабочего органа станка по авт. св. № 795731 отличающееся тем, что, с целью упрощения конструкции, датчик, выдающий сигнал о трогании с места рабочего органа станка, выполнен в виде установленного на корпусе гайки рычага, взаимодействующего одним концом с нарезкой винта, а другим с конечным выключателем. Источники информации, принятые во внимание при Экспертизе 1. Авторское свидетельство СССР 795731, кл. В 23 В 25/06, 1978.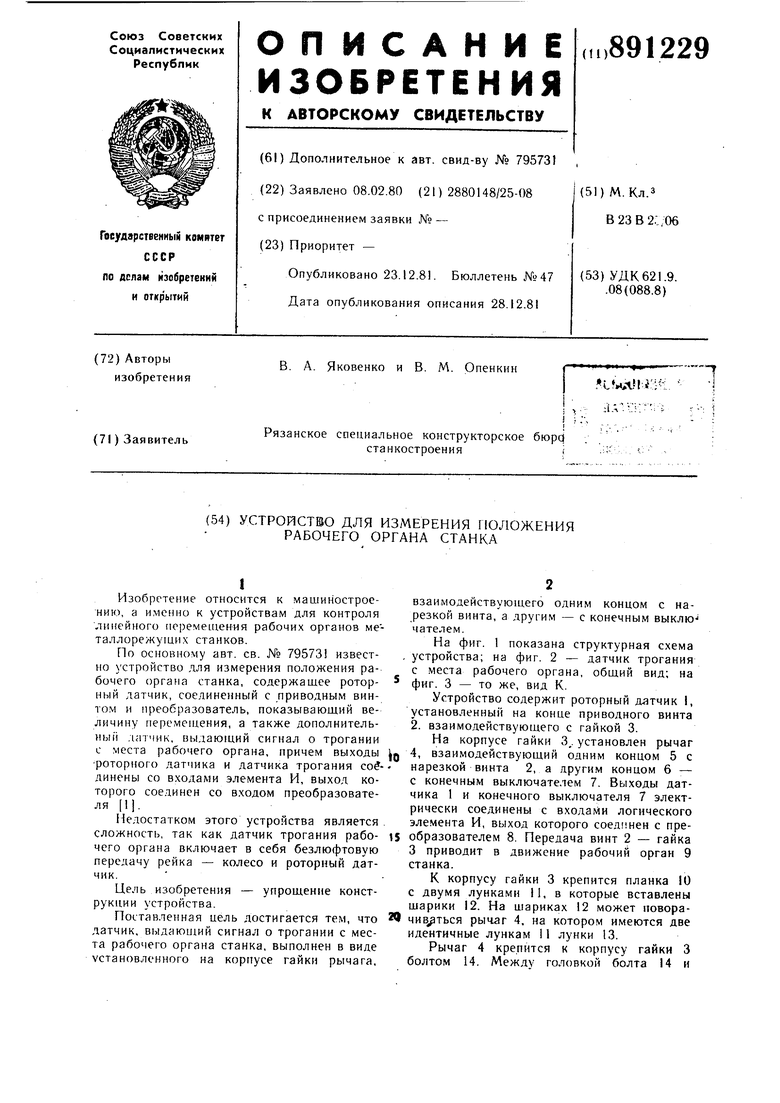
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения положенияРАбОчЕгО ОРгАНА CTAHKA | 1978 |
|
SU795731A1 |
| Устройство для измерения положения рабочего органа станка | 1980 |
|
SU929398A1 |
| Люнет | 1988 |
|
SU1662799A1 |
| Устройство для измерения положения механизма | 1980 |
|
SU876225A1 |
| Подающее устройство стволообрабатывающего станка | 1976 |
|
SU582963A1 |
| Механизированный привод самоцентрирующего кулачкового патрона | 1989 |
|
SU1636135A1 |
| Устройство для автоматическогопОзициОНиРОВАНия РАбОчЕгО ОРгАНА | 1979 |
|
SU831531A1 |
| Устройство для управления движением оптической каретки в интерферометре | 1980 |
|
SU934445A1 |
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| УСТРОЙСТВО ДЛЯ ВВОДА КОРРЕКЦИИ НА ИЗМЕНЕНИЕ РАДИУСА ИНСТРУМЕНТА | 1969 |
|
SU234828A1 |
Фид./
