(54) СХВАТ ПРОМЫШЛЕННОГО РОБОТА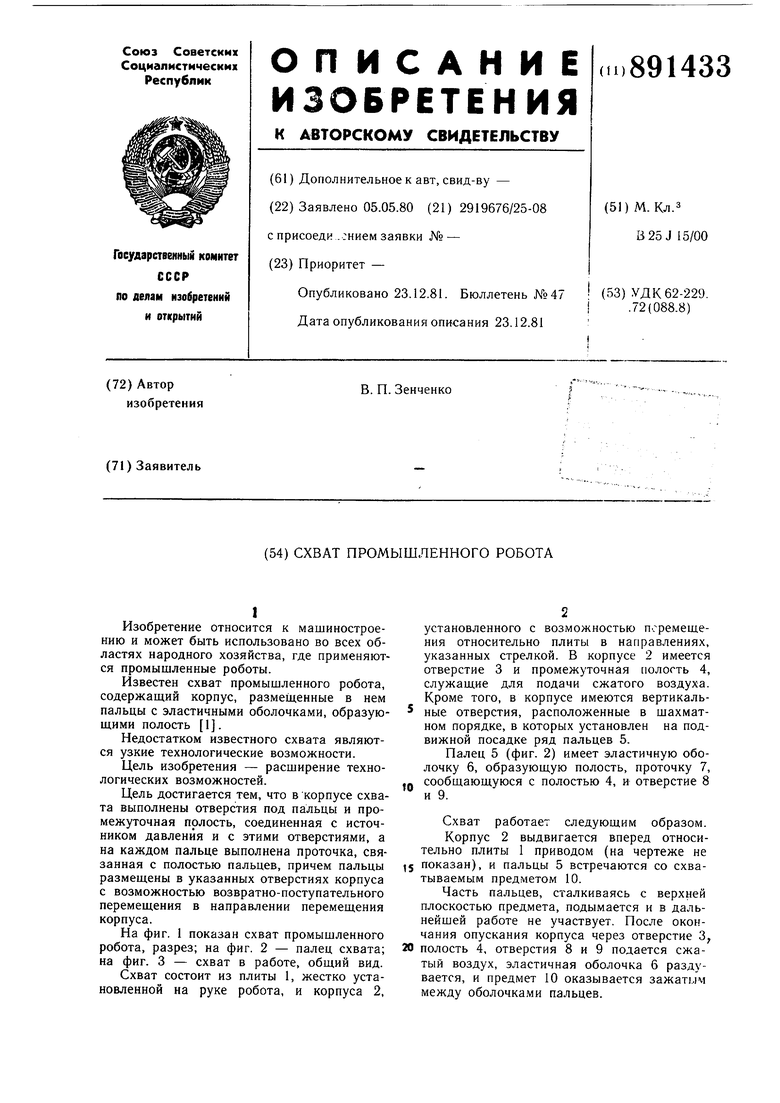
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1977 |
|
SU738864A1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРОСХВАТ | 2004 |
|
RU2266190C1 |
| Схват промышленного робота | 1990 |
|
SU1798188A1 |
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |
| СХВАТ МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2259915C1 |
| МИКРОСХВАТ С СИЛОВЫМ ОЧУВСТВЛЕНИЕМ | 2004 |
|
RU2261170C1 |
| Автоматизированный комплекс для штамповки | 1981 |
|
SU997924A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1992 |
|
RU2008200C1 |

I
Изобретение относится к машиностроению и может быть использовано во всех областях народного хозяйства, где применяются промышленные роботы.
Известен схват промышленного робота, содержаший корпус, размещенные в нем пальцы с эластичными оболочками, образуюш,ими полость 1.
Недостатком известного схвата являются узкие технологические возможности.
Цель изобретения - расширение технологических возможностей.
Цель достигается тем, что в корпусе схвата выполнены отверстия под пальцы и промежуточная полость, соединенная с источником давления и с этими отверстиями, а на каждом пальце выполнена проточка, связанная с полостью пальцев, причем пальцы размещены в указанных отверстиях корпуса с возможностью возвратно-поступательного перемещения в направлении перемещения корпуса.
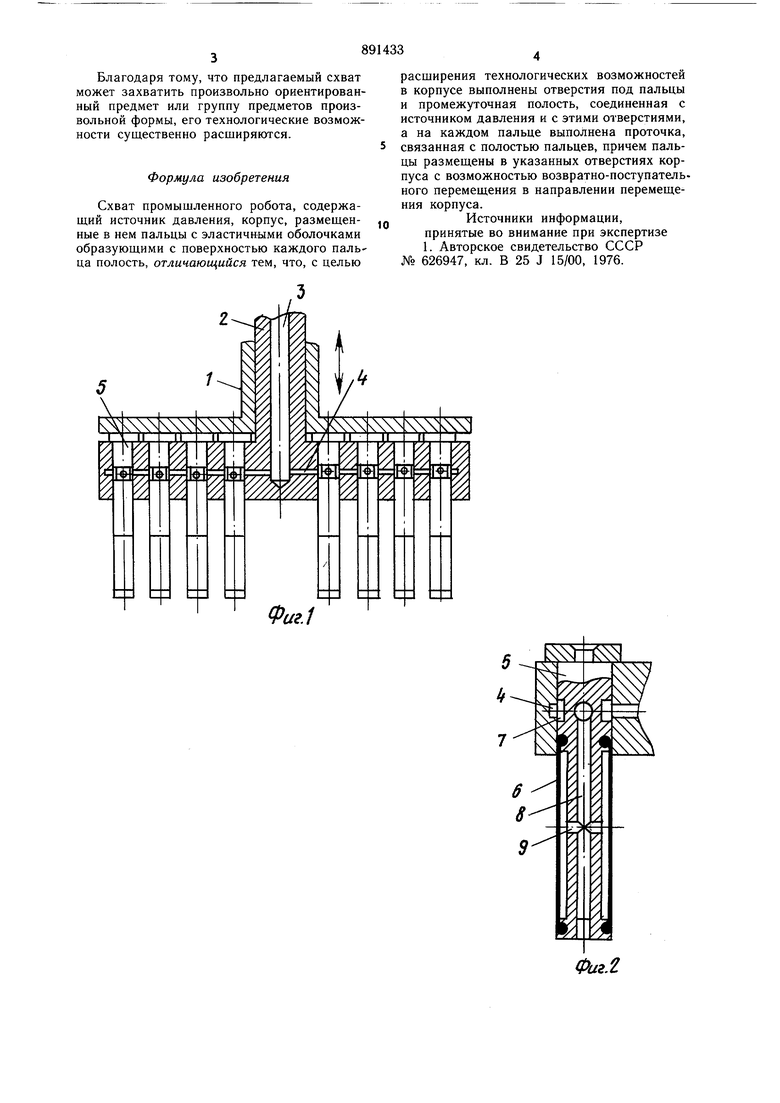
На фиг. 1 показан схват промышленного робота, разрез; на фиг. 2 - палец схвата; на фиг. 3 - схват в работе, общий вид.
Схват состоит из плиты 1, жестко установленной на руке робота, и корпуса 2,
установленного с возможностью перемещения относительно плиты в направлениях, указанных стрелкой. В корпусе 2 имеется отверстие 3 и промежуточная полость 4, служащие для подачи сжатого воздуха. Кроме того, в корпусе имеются вертикальные отверстия, расположенные в шахматном порядке, в которых установлен на подвижной посадке ряд пальцев 5.
Палец 5 (фиг. 2) имеет эластичную оболочку 6, образующую полость, проточку 7,
.ц сообщающуюся с полостью 4, и отверстие 8 и 9.
Схват работает следующим образом. Корпус 2 выдвигается вперед относительно плиты 1 приводом (на чертеже не fj показан), и пальцы 5 встречаются со схватываемым предметом 10.
Часть пальцев, сталкиваясь с верхней плоскостью предмета, подымается и в дальнейшей работе не участвует. После окончания опускания корпуса через отверстие 3, 20 полость 4, отверстия 8 и 9 подается сжатый воздух, эластичная оболочка б раздувается, и предмет 10 оказывается зажатым между оболочками пальцев.
Благодаря тому, что предлагаемый схват может захватить произвольно ориентированный предмет или группу предметов произвольной формы, его технологические возможности существенно расширяются.
Формула изобретения
Схват промышленного робота, содержащий источник давления, корпус, размещенные в нем пальцы с эластичными оболочками образующими с поверхностью каждого пальца полость, отличающийся тем, что, с целью
расширения технологических возможностей в корпусе выполнены отверстия под пальцы и промежуточная полость, соединенная с источником давления и с этими отверстиями, а на каждом пальце выполнена проточка, связанная с полостью пальцев, причем пальцы размещены в указанных отверстиях корпуса с возможностью возвратно-поступательного перемещения в направлении перемещения корпуса.
Источники информации, принятые во внимание при экспертизе L Авторское свидетельство СССР № 626947, кл. В 25 J 15/00, 1976.
10
Фиг.Ъ
