Изобретение относится к средствам автоматизации различных процессов, может быть использовано в машиностроении, приборостроении как средство для удержания и перемещения деталей при различных технологических процессах.
Известен способ промышленного робота, содержащий корпус, губки с хвостовиком, подпружиненные платформы и привод [1] .
Ограниченные технологические возможности являются недостатком этого схвата.
Наиболее близким по технической сущности к изобретению является схват промышленного робота, содержащий корпус, губки с хвостовиком и привод (авт. св. N 716810/ кл. B 25 J 15/00, 1978).
Ограниченные технологические возможности из-за ударности воздействия на захватываемую деталь является недостатком этого схвата.
Целью изобретения является расширение технологических возможностей за счет обеспечения захвата хрупких деталей.
Это достигается тем, что в схвате промышленного робота, в корпусе которого шарнирно закреплены губки с хвостовиками, выполненными в виде изогнутой плоской пружины и взаимодействующими с приводом, например с пневматическими камерами, хвостовик каждой губки шарнирно закреплен в корпусе, а привод смонтирован в плоскости, проходящей через линию перегиба каждой плоской пружины, хвостовик каждой зажимной губки шарнирно связан с дополнительно введенным подпружиненным поршнем, установленным в цилиндре, размещенным в корпусе с возможностью возвратно-поступательного движения, при этом поршень снабжен проходными отверстиями, а внутренняя полость цилиндра заполнена жидкостью.
На чертеже показан схват, общий вид.
Схват содержит корпус 1, закрепленные на нем с помощью шарнира 2 зажимные губки 3 с плоской пружиной 4. Хвостовик каждой губки 3 при помощи шарнира 5 через шток 6 связан с поршнем 7, установленным в цилиндре 8, в котором размещена пружина 9, подпружинивающая поршень 7. Цилиндр 8 заполнен жидкостью 10. Перегиб пружины 4 снабжен приводом, выполненным из двух пневматических камер 11 и 12. Поршень 7 снабжен проходными отверстиями.
Схват работает следующим образом.
В исходном состоянии (показано сплошной линией) при невключенном приводе плоская пружина 4 изогнута в сторону оси схвата. Поршень 7 под действием пружины 9 находится в нижнем положении, зажимные губки 3 разведены. При подаче сжатого воздуха в камеру 11 последняя, расширяясь, оказывает давление на перегиб плоской пружины 4. Так как длина плоской пружины 4 больше, чем расстояние между шарнирами 2 и 5, то плоская пружина под давлением на перегиб камерой 11 будет получать дополнительный перегиб у шарниров 2 и 5 (показано пунктирной линией и согласно теореме Лагранжа-Дирихле распорная сила плоской пружины будет увеличиваться).
Одновременно при увеличении распорной силы плоской пружины поршень 7 начинает утапливаться, преодолевая сопротивление пружины 9, расстояние между шарнирами 2 и 5 увеличивается, прогиб пружины уменьшается (показано пунктирной линией). Плоская пружина 4, переходя среднее неустойчивое положение, под действием распорной силы пружины 9 переходит (выгибается) к новому устойчивому положению (перегибом от оси схвата), что приводит к плавному сведению зажимных губок 3, зажимающих деталь (показано штрихпунктирной линией) за счет перетока жидкости из нижней части цилиндра 8 в верхнюю часть.
При разведении зажимных губок 3 сжатый воздух подается в пневматическую камеру 12, а выход камеры 11 соединяется с атмосферой. Камера 12 расширяется и воздействует на перегиб плоской пружины 4.
(56) Авторское свидетельство СССР N 1614908, кл. В 25 J 15/00, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1988 |
|
SU1614908A2 |
| Схват промышленного робота | 1978 |
|
SU716810A1 |
| Пневматический адаптивный сборочный схват | 1989 |
|
SU1794642A1 |
| Пневматический адаптивный сборочный схват | 1989 |
|
SU1701517A1 |
| Схват промышленного робота | 1978 |
|
SU673448A1 |
| Схват промышленного робота | 1988 |
|
SU1830344A1 |
| ТЕПЛОВОЙ ДВИГАТЕЛЬ | 1992 |
|
RU2022166C1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Схват | 1981 |
|
SU952581A1 |
Изобретение относится к средствам автоматизации различных процессов и может быть использовано в машиностроении, приборостроении как средство для удержания и перемещения деталей при различных технологических процессах. Хвостовик зажимных губок 3 при помощи шарнира 5 связан через шток 6 с поршнем 7, выполненным со сквозными отверстиями. Цилиндр 8 заполнен жидкостью 10. 1 ил.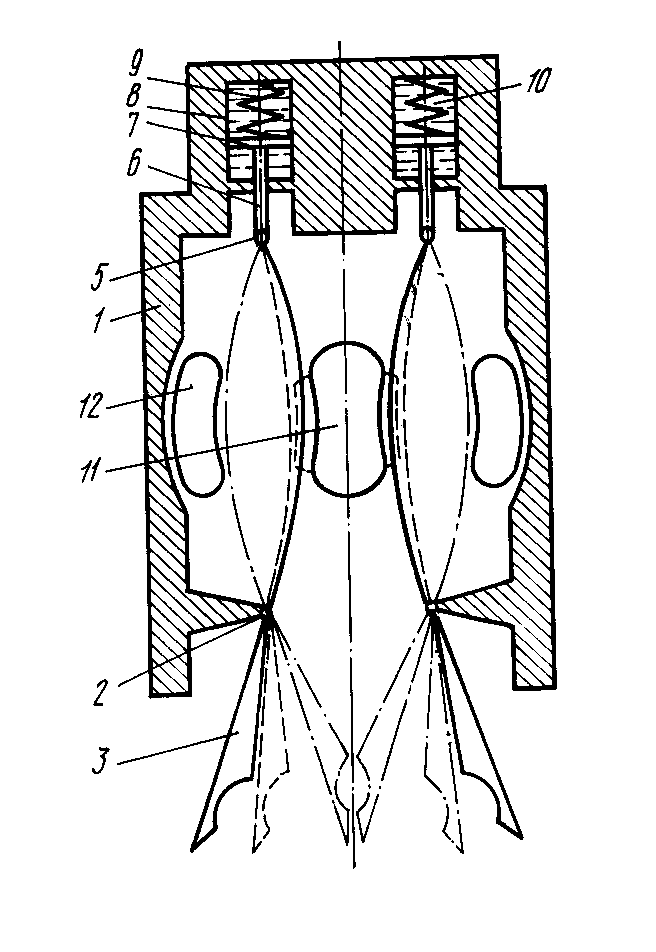
СХВАТ ПРОМЫШЛЕННОГО РОБОТА, в корпусе которого шарнирно закреплены губки с хвостовиками, выполненными в виде изогнутой плоской пружины и взаимодействующими с приводом, например с пневматическими камерами, хвостовик каждой губки шарнирно закреплен в корпусе, а привод смонтирован в плоскости, проходящей через линию перегиба каждой плоской пружины, при этом хвостовик каждой губки шарнирно связан с подпружиненным поршнем, расположенным в цилиндрической проточке корпуса с возможностью возвратно-поступательного движения, отличающийся тем, что цилиндрическая проточка выполнена с замкнутой полостью, которая заполнена жидкостью, а в поршне выполнены проходные отверстия.
