I
Изобретение относится к транспортному машиностроению, преимущественно к производству базовых машин на гусеничном ходу под установку оборудования для работы на ферромагнитных поверхностях.
Известно,устройство для проведения работ на ферромагнитной поверхности, содержащее раму, установленные по бокам рамы гусеничные тележки, снабженные магнитами, взаимодействующими с ферромагнитной поверхностью, благодаря чему устройство вместе с рабочим оборудованием может передвигать ся по наклонной и вертикальной стен-ке 1.
Однако устройство не обеспечивает передвижения по изогнутой по кривой поверхности, так как на перегибах поверхности магниты могут оторваться эт нее. Кроме того, работа устройств ненадежна из-за жесткого закрепления магнитов на звеньях гусеницы, вследствие чего мелкие неровности поверхности ими не отслеживаются.
Известно также устройство для п ведения работ на ферромагнитной поверхности, содержащее раму, установленные по бокам рамы на поперечных балансирах сдвоенные гусеничные тележки, каждая из которых охвачена звенчатой гусеничной лентой, удерживаемой направляющими, и закрепленное
10 на раме рабочее оборудование.
Это устройство, благодаря наличию поперечных балансиров, обеспечивает хорошее отслеживание Гусеничными тележками криволинейных поверхнос15тей 2.
Однако оно плохо удерживается на наклонных поверхностях из-за слабого сцепления с поверхностю движения.
Цель изобретения - повышение
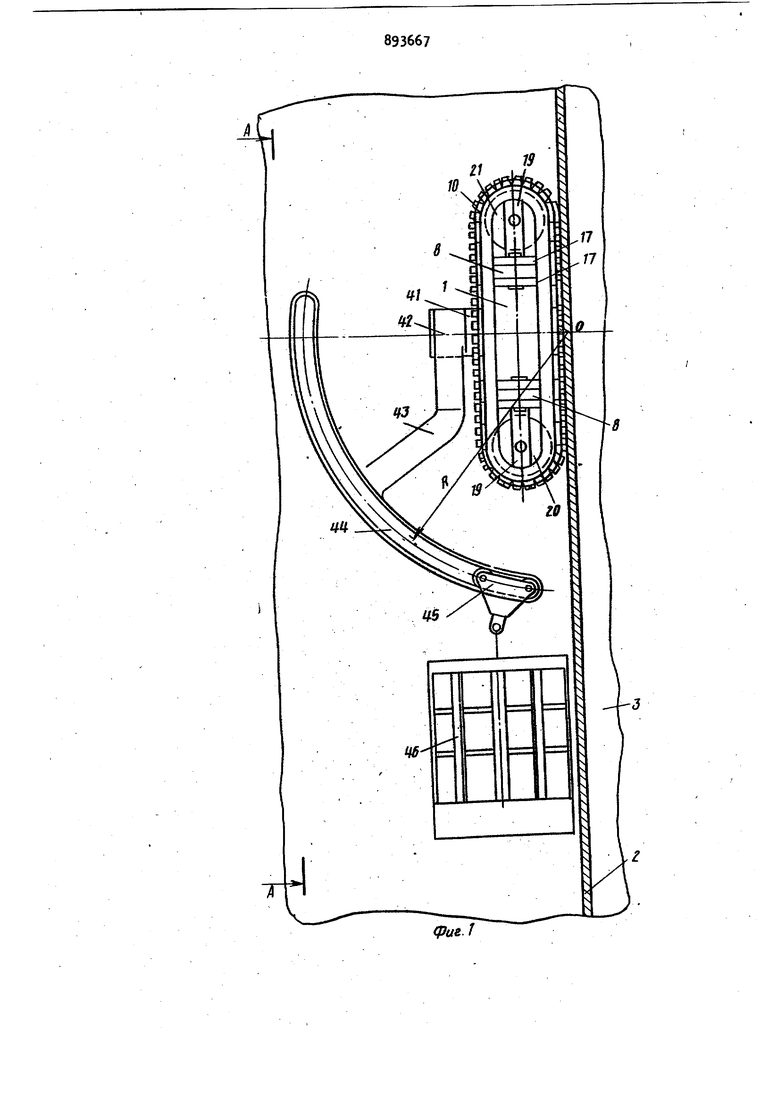
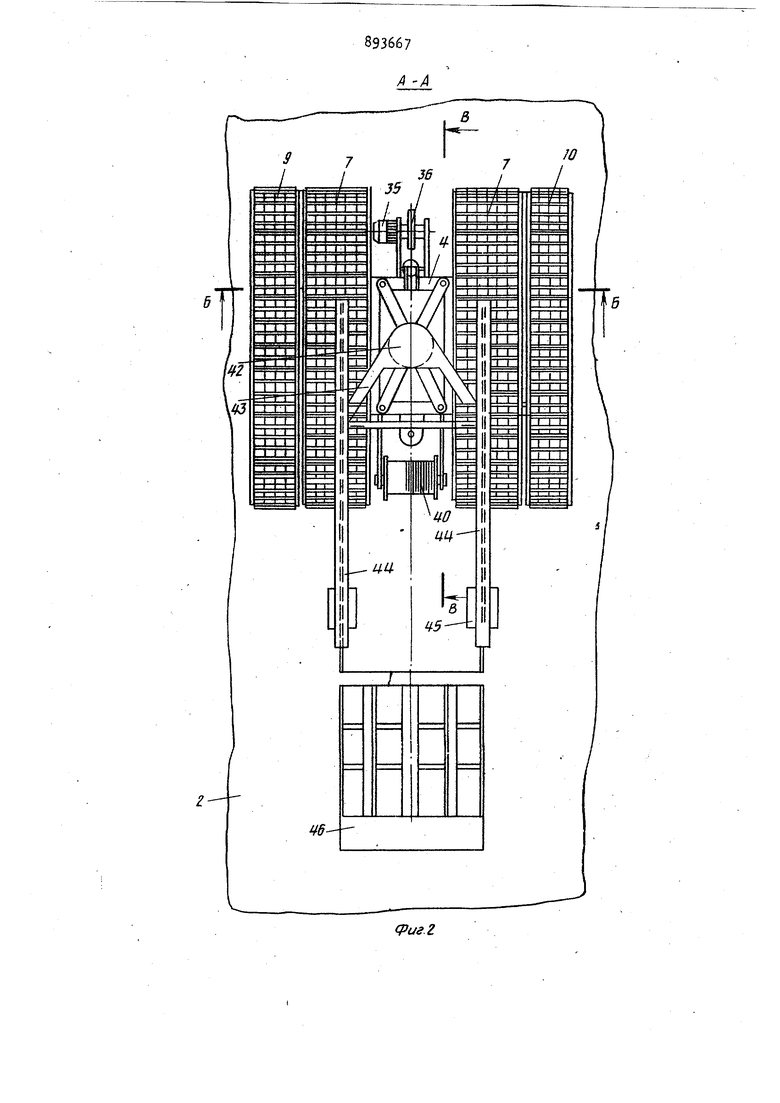
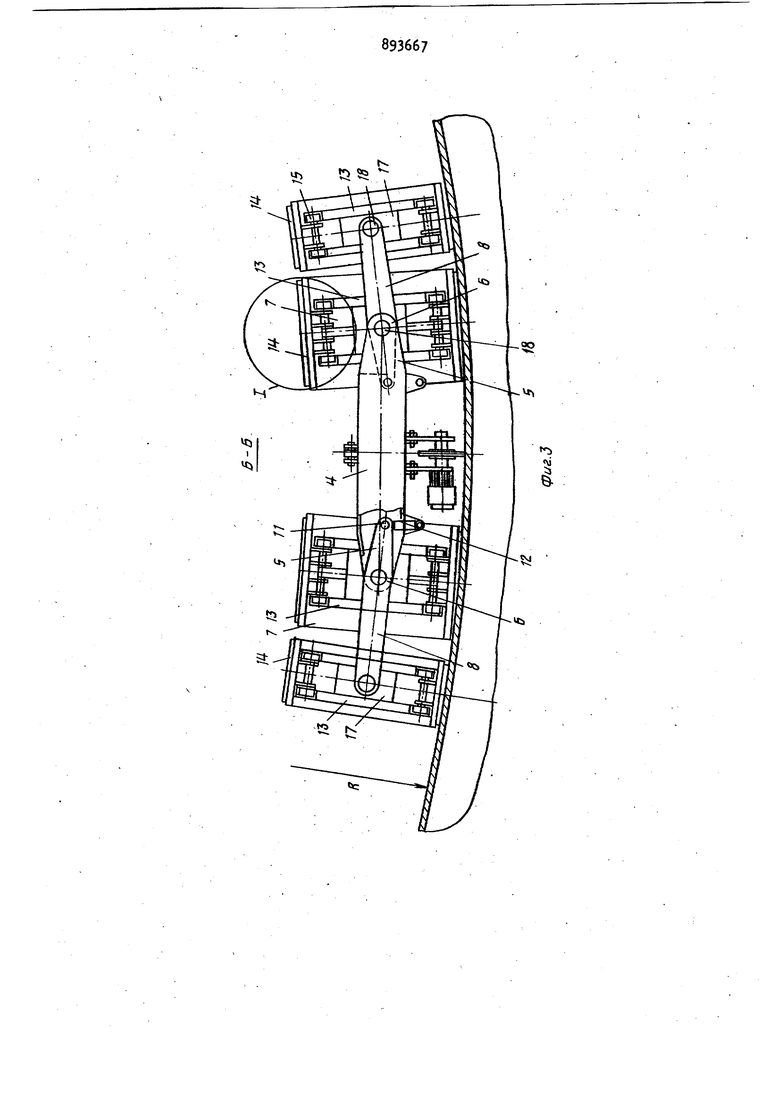
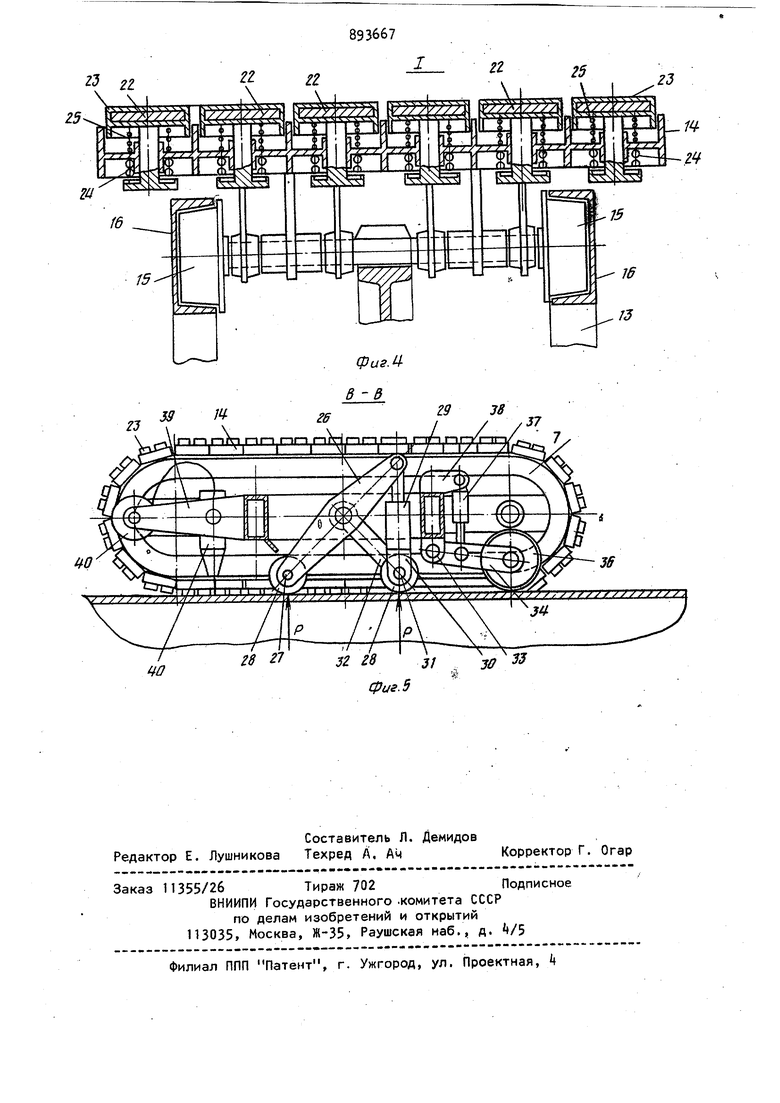
20 надежности путем обеспечения плотного сцепления гусеничных лент с опорной поверхностью в рабочем и транспортном режиме. Поставленная цель достигается тем, что устройство снабжено установленными в направляющих тележек роликами, прикреплёнными к звеньям гусеничной ленты, и подпружиненными магнитами, размещенными в отверстиях которые выполнены в указанных звеньях. Кроме того, рабочее оборудование состоит из управляемых гидроцилиндра ми И установленных последовательно на раме с помощью шарнирно соединенных рычагов наждачного круга с электромотором и двух прижимных роликов. Устройство снабжено люлькой для установки дополнительного рабочего оборудования, закрепленной на раме при помощи Поворотной цапфы и криволинейных направляющих,.причем центр кривизны направляющих размещен в центре суммарных коэрцитивных сил действующих магнитов. На фиг. 1 показано устройство для проведения работ на ферромагнит ной поверхности, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2, на фиг. - узел I на фиг. 3, разрез; на фиг. 5 - резрез В-В на фиг. 2. Устройство 1 перемещается п ферромагнитной Поверхности 2, образующей емкость 3 реакторного отделе ния атомного реактора (или возможно емкость другого назначения, например, для хранения жидких нефтепроду тов, или являющаяся баком или корпу сом морского судна и т.д.). Устройство содержит раму 4 с кро штейнами 5, прикрепленными в ее углах. На концах кронштейнов выполнены проушины 6. С помощью пальцев на них прикреплены две ведущие гусеничные тележки 7 ограниченного поворота и двуплечие рычаги 8, кото рые попарно с каждой стороны соединены между собой распорками. На кон цах внешних плеч двуплечих рычагов шарнирно с ограниченным поворотом прикреплены предохранительные (стра хующие) гусеничные тележки 9 и 10, на внутренних концах двуплечих рыча гов прикреплены штоки 11 пневмогид. равлических демпферов 12, шарнирно соединенных снизу скронштейнами 5Гусеничные тележки состоят из рамы 13, звеньев 1 с опорными роли ками 15. Рама выполнена из двух выт нутых замкнутых (швеллерных) направ 7 .4 ляющих 16 с ребрами 17 жесткостк, имеющих отверстия 18 для шарнирного соединения с кронштейном 5 и двуплечим рычагом В. В районе центра радиусу кривизны направляющих на осевой распорке 19 выполнены отверстия для вала ведущей звездочки 20 и для осей направляющего колеса 21 гусеничной тележкой 7 и преДохранительных гусеничных тележек 9 ,и 10. Звенья 1 снабжены постоянными магнитами 22 большой коэрцитивной силы (например из элементов SmCoS), которые заключены в стальные плаващие обоймы 23, смонтированные подвижно в отверстиях траков с помощью цилиндрических пружин 2 и 25. Внутренняя пружина 2k во много раз сильнее наружной пружины 25. Это делается с целью обеспечения высокой прохо-- димости тележек при наличии неровностей поверхности. На продольных сторонах рамы (на ее середине) шарнирно прикреплен рамный двуплечий рычаг 26. На нижнем его конце на осях 27 прикреплен прижимной ролик 28. На другом конце рычага 26 прикреплен шток гидроцилиндра 29, корпус которого прикреплен снизу к кронштейну 30. На оси 31установлен второй прижимной ролик 26, связанный через ось и тягу 32с осями крепления рычага 26 к раме k. Спереди рамы t между ведущими гусеничными тележками 7 на оси прикреплено на .проушинах 33 поворотно вилочное водило З, на конце которого на валу электродвигателя 35 установлен абразивный наждачный круг 36, предназначенный для разделки кромок свариваемого листа. Подъем и опускание наждачного круга вместе с двигателем производится гидроцилиндром 37, прикрепленным с одной стороны к проушине 38 сверху рамы , а с другой к водилу 3. С другой стороны рамы на кронштейнах 39 установлено автоматическое сварочное устройство с барабаном для сварочной проволоки . Сверху на раме прикреплена ось А1, несущая поворотную цапфу , на которой прикреплены фигурные кронштейны 3, несущие выполненные по кривой круга две направляющие kk с центром кривизны на середине касания гусеничных тележек с поверхностью 2 5 реакторного отделения. На этих направляющих прикреплены монорельсовые тележки kS, на которых подвешена люлька +6. Устройство работает следующим, образом. Транспортировка его осуществляется в специальной таре из диамагнитно го материала (дерева и т.п.) на тол стой подставке. Для выхода устройства на вертикальную поверхность у выхода из тары ставится пандус под углом , по которому оно своим ходом поднимается на вертикальную стену, при этом управление осуществляется с выносного пульта. Удерживается устройство на вертикальной и других поверхностях под де ствием на стальную облицовку (экран) постоянных магнитов. Сила прижима магнитов должны быть такой, чтобы обеспечить достаточную силу трения между обоймой 23 (в которой заключены постоянные магниты) и поверхность 2. Чтобы обеспечить разномерную и од наковую работу и силу прижима постоя ных магнитов 22 при соприкосновении с поверхностью 2, каждое звено снабжено опорным роликом 15, перемещаемым звездочкой 20 по швеллерным направляющим 16 гусеничныхтележек. При сварке стыков листов устройст во ставится на шов так, чтобы шов проходил по продольной осевой плоскости . С помощью гидроцилиндра 29 опускаются на кромку листов поверхности 2 прижимные ролики 28, которые отталкиваясь под действием силы Р до совмещения стыков листов, стремятся оторвать устройство от экрана. Так как запас коэрцитивной(магнитной силы должен превышать силу, необходимую для сведения листов, устройство от экрана не отрывается и не сползает. В связи с тем, что сведение листов так же, как и сварка сведенного стыка производится непрерывно на ходу с помощью автоматического сварочного аппарата, наждачный круг Зб при этом непрерывно работает, под Iотавливает кромку шва под сварку. Передвижение устройства осуществляется с помощью мотор-редуктора с бол шим передаточным числом, соответству ющим скорости автоматической сварки Предохранительные несамоходные гусеничные тележки 9 и 10 предохраня 7 ют устройство от падения при отрыве под воздействием приложения предельной силы Р роликов 28 в процессе выпрямления стыкуемых листов поверхности 2. Оторвавшееся устройство повисает на вспомогательных гусеницах, которые не отрываются от металлического листа (экрана). При транспортных перемещениях устройства или производстве других работ (отделочных, монтажных)опорные ролики 28 и наждачный круг Зб с помощью гидроцилиндров 29 и 37 поднимаются. Возврат ведущих гусеничных тележек 7 производится после подъема роликов 28 при помощи магнитов на траках, которые притягивают гусеничные тележки 7 к поверхности 2. При необходиf4OCTn. демпферы 12 и гусеничные тележки 7 возвращаются в исходное положение . Наличие плавающях обойм с постоянными магнитами позволяют трактору перемещаться по вогнутой, выпуклой сферической поверхности, при этом возможно преодоление мелких неровностей на поверхности экрана. Дугообразные направляющие , поворотно прикрепленные на оси 41, позволяют люльке 6 занимать всегда радиальное положение, при котором равнодействующая сил от люльки направлена от точки 0. При использовании предлагаемого устройства появляется возможность надежной эксплуатации самоходного устройства на любой ферромагнитной поверхности. Причем эта надежность остается как при его эксплуатации на вертикальных поверхностях, так и при вь1полнении работы на потолках. Это подтверждается тем, что, например 1 м- площади магнита толщиной 10 мм обеспечивает коэрцитивную силу ;(магнитную), равную 96 тоннам. Кроме того, по сравнению с устройствами, выполненными с электромагнитами, это устройство имеет меньшую массу не подвержен© Фгфаву от стен при отключении эяекТ1юэ ергии, не требуется бопьш.ог© количества проводов, подключающих эя ктромагниты. формула изобретения 1. Устройство для проведения работ на ферромагнитной поверхности, содержащее раму, установленные по бокзм рамы на поперечных балансирах сдвоенные Гусеничные тележки, каждая из которых охвачена звенчатой гусеничной лентой, удерживаемой направляющими, и закрепленное на раме рабочее оборудование, отличающееся тем, что с целью повышения надежности, путем обеспечения плотного сцепления гусеничных лент с опорной поверхностью в рабочем и транспортном режиме, оно снабжено установленными в направляющих тележек роликамиj прикрепленными к звеньям гусеничной ленты, и подпружиненными магнитами, размещенными в отверстиях, которые выполнены в указанных звеньях.
2. Устройство по п.1, о т ли чающееся тем, что рабочее оборудование состоитиз управляемых гидроцилиндрами и установленных последовательно на раме с помощью шарнирно соединенных рычагов наждачного круга с электромотором и двух прижимных роликов.
3. Устройство по п.1, о т л и чающееся тем, что оно снабжено люлькой для установки дополнительного рабочего оборудования, закрепленной на раме при помощи поворотной цапфы и криволинейных направляющих, причем центр направляющих размещен в центре суммарных коэрцитивных сил действующих магнитов.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № , кл. 8 63 В 59/00, 1972.
2.Патент США № 41665П, кл.180-9.5, 1979 (прототип).
D55
| название | год | авторы | номер документа |
|---|---|---|---|
| Катковый гусеничный движитель | 1973 |
|
SU472052A1 |
| Способ повышения проходимости гусеничного транспортного средства и гусеничное транспортное средство для его осуществления | 1988 |
|
SU1523454A1 |
| Комбинированный движитель транспортного средства | 1980 |
|
SU918162A1 |
| КОРНЕКЛУБНЕУБОРОЧНЫЙ АГРЕГАТ И.Г.МУХИНА | 1996 |
|
RU2104630C1 |
| Установка для исследования взаимодействия гусеничного движителя с грунтом | 1981 |
|
SU1000822A1 |
| Опорно-ходовое устройство для передвижных лесов | 1977 |
|
SU883293A1 |
| Шлифовальная тележка рельсошлифовального поезда | 2023 |
|
RU2833447C1 |
| Транспортно-тяговое средство | 1987 |
|
SU1435503A1 |
| Гусеничный трактор | 1986 |
|
SU1342809A1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2364540C1 |