(54) ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1978 |
|
SU765183A1 |
| Автоматический захват | 1981 |
|
SU1020350A1 |
| Грузозахватное устройство | 1980 |
|
SU912623A1 |
| Грузозахватное устройство | 1982 |
|
SU1098896A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Захватное устройство для грузов | 1978 |
|
SU821382A1 |
| Механизм фиксации элементов грузозахватного устройства | 1981 |
|
SU1006355A1 |
| ГРУЗОПОДЪЕМНАЯ ТРАВЕРСА ДЛЯ КРУПНОРАЗМЕРНЫХГРУЗОВ | 1966 |
|
SU183353A1 |
| АГРЕГАТ ДЛЯ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ | 1991 |
|
RU2014458C1 |
| Грузозахватное устройство | 1982 |
|
SU1052469A1 |
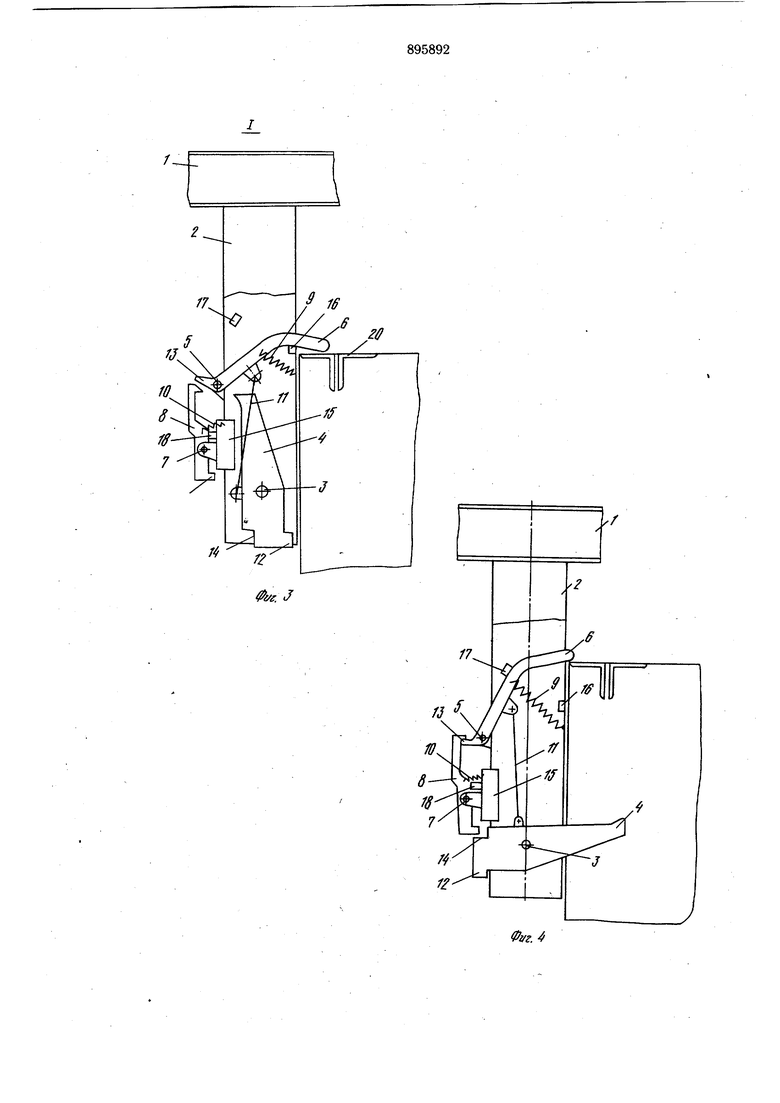

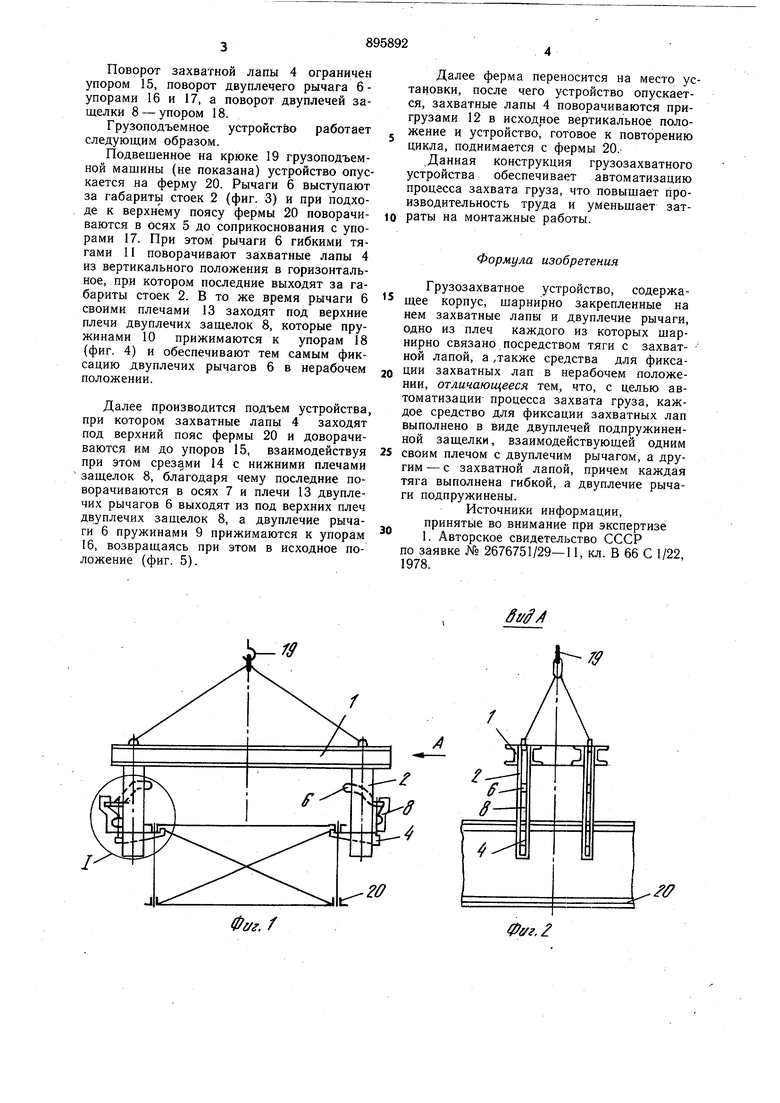
Изобретение относится к грузоподъемным механизмам и предназначено для подъема крупногабаритных изделий, например стропильных ферм при сооружении каркасов зданий. Известно грузозахватное устройство, содержащее корпус, шарнирно закрепленные на нем захватные лапы и двуплечие рычаги, одно из плеч каждого из которых шарнирно связано посредством тяги сзахватной лапой, а также средства для фиксации захватных лап в нерабочем положении 1. Это устройство предусматривает дистанционную растроповку груза с земли тяговыми тросами, что исключает автоматизацию процесса его подъема и снижает тем самым производительность монтажных работ. Цель изобретения - автоматизация процесса захвата груза. Цель достигается тем, что каждое средство для фиксации захватных лап выполнено в виде двуплечей подпружиненной защелки, взаимодействующей одним своим плечом с двуплечим рычагом, а другим с захватной лапой, причем каждая тяга выполнена гибкой, а двуплечие рычаги подпружинень. На фиг. 1 изображено устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - узел 1 на фиг. 1 (в момент опускания устройства на груз); на фиг. 4- то же, в момент поворота захватных лап в рабочее положение; на фиг. 5 - то же, в момент подъема груза. Грузозахватное устройство содержит корпус 1 с вертикальными стойками 2, между которыми с возможностью поворота установлены на осях 3 захватные лапы 4, на осях 5 - двуплечие рычаги 6, а на осях 7-двуплечие защелки 8. Двуплечие рычаги 6 подпружинены пружинами 9, а двуплечие защелки 8 - пружинами 10. Каждая захватная лапа 4 соединена с двуплечим рычагом 6 гибкой тягой 11 и установлена с возможностью поворота за счет момента, создаваеКюго пригрузом 12, прикрепленным к лапе Л. Двуплечая защелка 8 установлена с возможностью взаимодействия своим верхним плечом с плечом 13 двуплечего рычага 6, а своим нижним плечом- со срезом 14 захватной лапы 4.
Поворот захватной лапы 4 ограничен упором 15, поворот двуплечего рычага 6 упорами 16 и 17, а поворот двуплечей защелки 8 - упором 18.
Грузоподъемное устройство работает следующим образом.
Подвешенное на крюке 19 грузоподъемной мащины (не показана) устройство опускается на ферму 20. Рычаги б выступают за габариты стоек 2 (фиг. 3) и при подходе к верхнему поясу фермы 20 поворачиваются в осях 5 до соприкоснования с упорами 17. При этом рычаги 6 гибкими тягами 11 поворачивают захватные лапы 4 из вертикального положения в горизонтальное, при котором последние выходят за габариты стоек 2. В то же время рычаги 6 своими плечами 13 заходят под верхние плечи двуплечих защелок 8, которые пружинами 10 прижимаются к упорам 18 (фиг. 4) и обеспечивают тем самым фиксацию двуплечих рычагов 6 в нерабочем положении.
Далее производится подъем устройства, при котором захватные лапы 4 заходят под верхний пояс фермы 20 и доворачиваются им до упоров 15, взаимодействуя при этом срезами 14 с нижними плечами защелок 8, благодаря чему последние поворачиваются в осях 7 и плечи 13 двуплечих рычагов б выходят из под верхних плеч двуплечих защелок 8, а двуплечие рычаги б пружинами 9 прижимаются к упорам 16, возвращаясь при этом в исходное положение (фиг. 5).
Фаг. f
Далее ферма переносится на место установки, после чего устройство опускается, захватные лапы 4 поворачиваются пригрузами 12 в исходное вертикальное положение и устройство, готовое к повторению цикла, поднимается с фермы 20.Данная конструкция грузозахватного устройства обеспечивает автоматизацию процесса захвата груза, что повыщает производительность труда и уменьщает затраты на монтажные работы.
Формула изобретения
Грузозахватное устройство, содержащее корпус, щарнирно закрепленные на нем захватные лапв и двуплечие рычаги, одно из плеч каждого из которых шарнирно связано посредством тяги с захватной лапой, а ,также средства для фиксации захватных лап в нерабочем положении, отличающееся тем, что, с целью автоматизации- процесса захвата груза, каждое средство для фиксации захватных лап выполнено в виде двуплечей подпружиненной защелки, взаимодействующей одним
своим плечом с двуплечим рычагом, а другим - с захватной лапой, причем каждая тяга выполнена гибкой, а двуплечие рычаги подпружинены.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2676751/29-11, кл. В 66 С 1/22, 1978.
ff//}
./
фуг. г
Фуг,
