(54) МЕХАНИЗМ ПОДЪЕМА И ОПУСКАНИЯ РАБОЧИХ ОРГАНОВ СЕЛЬСКОХОЗЯЙСТВЕННОЙ MAmmibI
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство | 1985 |
|
SU1320095A1 |
| Механизм подъема и опускания рабочих органов сельскохозяйственной машины | 1982 |
|
SU1087105A1 |
| Механизм подвески и уравновешивания жатки комбайна | 1983 |
|
SU1151228A1 |
| Устройство для приема и отвода паковок от машин формования химических нитей | 1983 |
|
SU1138377A2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА Л.Н. БУРКОВА | 2007 |
|
RU2335872C1 |
| Широкозахватное почвообрабатывающее орудие | 1982 |
|
SU1042636A1 |
| Телескопический подъемник | 1990 |
|
SU1754641A1 |
| ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ | 2006 |
|
RU2329629C1 |
| Планировщик | 1988 |
|
SU1715999A1 |
| Транспортное средство со съемным контейнером | 1986 |
|
SU1393684A1 |
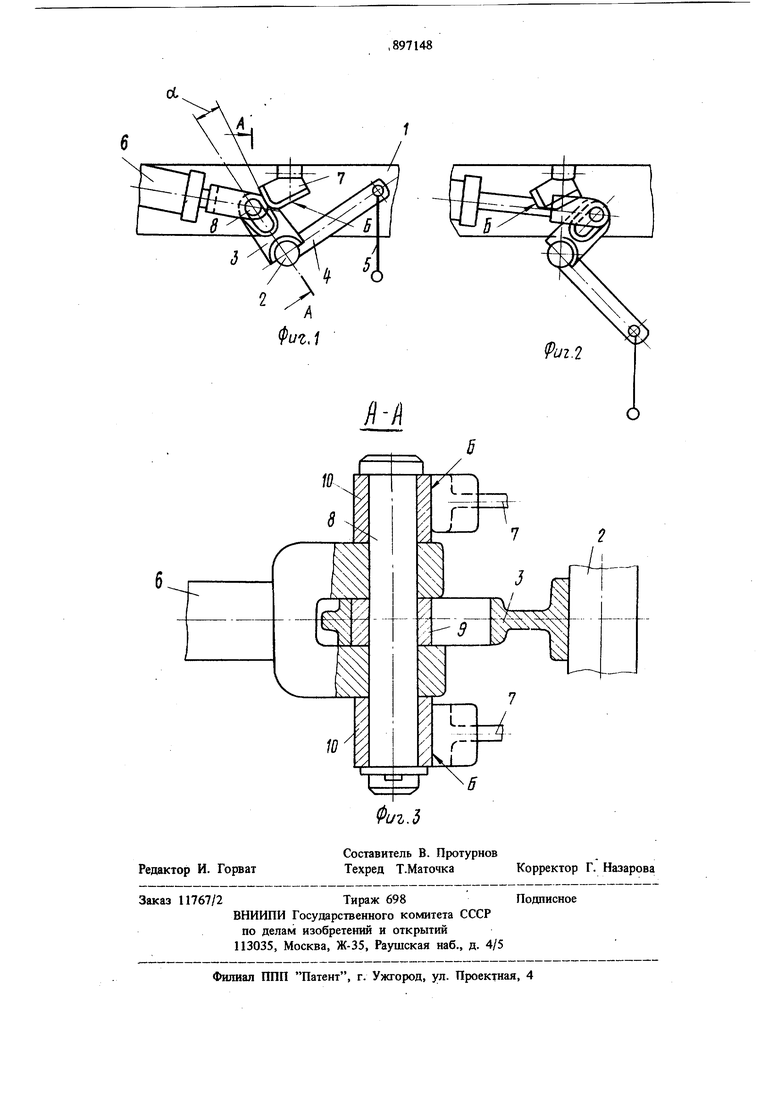
Изобретение относится к сельскохозяйственному машиностроению, в частности к механизмам подъема и опускания рабочих органов, используемым в машинах для обработки и уборки рядков корнеплодов. Известен механизм подъема и опускания рабочих органов сельскохозяйственных машин, включающий установленный на раме поворотный вал с рычагами, связанными соответственно с рабочими органами и гидроцилиндром подъема, и фиксирующее устройство поднятого положения рабочих органов 1. Данное его устройство характеризуется необходимостью включения фиксирующего устройства вручную при поднятом положении рабочих органов, что снижает производительность маитаны. Известен также механизм подъема и опускания рабочих органов, содержащий установленные на раме гидроцилиндр и двуплечий ры чаг, одно плечо которого связано с рабочими органами, а другое - с гидроцилиндром посредством пальца, расположенного в имеющемся на этом плече отверстии, и фиксатор для удержания рабочих органов в поднятом положенкис 2. Недостатком известного механизма является то, что в фиксирующем устройстве в процессе эксплуатации появляется износ шарнирных звеньев, вызывающий нарушение геометрического расположения рычагов системы и как следствие - снижение и потерю надежности фиксации поднятого положения рабочих органов машины. Кроме того, связь двуплечего рычага с рабочими органами, а также устройство фиксирующего элемента являются сложными. Цель изобретения - упрощение конструкции и повышение надежности работы механизма. Эта цель достигается тем, что отверстие, в котором расположен палец, выполнено овальным, а фиксатор - в виде закрепленного на раме упора, выполненного Г-образной формы. На фиг. 1 изображен механизм подъема и опускания рабочих органов, вид сбоку в поднятом положении; на фиг. 2 - то же, в опущенном положении; на фиг, 3 - разрез А-А на фиг. 1. Механизм подъема и опускания рабочих органов сельскохозяйственной машины содержит установленный на раме 1 двуплечий рычаг 2 с плечами 3 и 4, связанными с рабочими органами тягой 5 и с гадроцияиндром подъема 6 двухсторошгего действия, и фиксирующий элемент, выполненный в виде установ ленных на раме 1 пары неподвижных упоров 7 рабочая поверхность Б которых имеет Г-образ ную форму. Плечо 3 рычага 2 имеет овальное отверстие и связано со штоком гидроцилиндра 6 пальцем 8, на котором находится ролик 9, устанонленный в опзерстии плеча 3. На кон цах пальца 8 находится шток гидрО1шлинлра 6 и пара роликов 10, контактирующих в процессе работы механиглла с Г-образной поверхностью Б неподвиж ых упоров 7. Ьолыиая ось овального i огеерстия в положении поднятых рабогих органов образует с фиксирующей частью поверхности Ь угол а, рав)1ый или больишй нуля. Устройство работает слсдукицим образом. В опущенном положении рабочих органов на тягу 5 действует сила их веса, ллеЮ 3 рычага 2 находится в крайнем правом положении с взаимосвязанными с ним пальцем 8, роликами 9 и 10 н выдвину ым штоком гилроцилиндра подъема 6. При подъеме рабошх органоп щток гадроцилинцра 6, воздействуя через палец 8 и ролик 9 на плечо 3, преодолевает си лу веса рабочих органов машины и перемеищет рычаг 2 до контакта роликов 10 с поверх ностью Б. При дальяейи.гем перемещении роли ков 10 по поверхносги Б происходи одновре менное перемещение ролика 9, пальца 8 и щитка гидроцилиндра 6 в ова;гьном отверстии плеча 3, копируя при этом Г-образный профиль Б упора 7. При втя|{утом штоке гидроШ1линдра 6 алец 8 с ролик(1М 9 перемещает плечо 3 в крайнее левое положение, соответствующее поднятым рабочим органам мапшны и между фиксируюп1ей поверхностью, контактирующей с роликами 10 и больпгей осью овального отверстия плеча 3, образуется угол а 0. При снятии усилия на втягивание jmoка вес рабочих органов передается от овального отверстия плеча 3 через ролик 9, палец 8 и пару роликов 10 на поверхность Б, создавая в месте контакта силу, замыкающую неподвижно механизм. При этом шток гидроцилиндра 6 разгружается от силы веса рабочих органов. При опускании рабочих органов на штоке гидроцилиндра 6 появляется усилие, направленное вдоль штока, которое через палец 8 и ролики 10 передается на фиксирующие поверхности. Перекатываясь по поверхности Б гидроцилиндр 6 опускает рабочие органы машины.При этом ролик 9 обкатьшает поверхность Б и перемещается в овальном отверстии плеча 3. Конструкция механизма подъема и опускания рабочих органов позволяет повысить надежность фиксации рабочих органов в поднятом положении, упростить его конструкцию. Формула изобретения Механизм подъема и опускатшя рабочих органов сельскохозяйственной магпины, содержапи Й установленные на раме гидроцилиндр и двуплечий рычаг, одно плечо которого связано с рабомми органами, а другое - с гидроцилиндром посредством пальца, расположенного в имеющемся па этом плече отверстии, и фиксатор для удержания рабочих органов в поднятом положении, отличающийс я тем, что, с целью утфощения конструкп,ии и повышения надежности работы механизма, отверстие, в котором расположен палец, выполнено овальнлм, а фиксатор - в виде закрепленного па раме упора. 2. Механизм по п. 1, о т л и ч а ю щ и йс я тем, что упор вьшолнен Г-образной формы. Источники информации, принятые во внимание при экспертизе 1.Патент П1Р N 82230, кл. 45 С 33/14, 1974. 2.Авторское свидетельство СССР № 289796, кл. А 01 В 63/02, 1970.
