Изобретение относится к машинам, предназначенным для планировки поверхности земли. -
Известен планировщик, включающий раму, ковш, переднюю и заднюю ходовые тележки и механизмы управления.
Такой планировщик имеет два механизма управления - на передней w задней ходовых тележках. Передний механизм управления предназначен для регулирования высотного положения ковщ-а в процессе производства планировочных работ. Особенность этого механизма: вьуюл- нение точной регулировки, что достигается малой величиной и скоростью перемещения ковша. Задний механизм управления служит для перевода планировщика из транспортного положения в рабочее и ббратно. Этот механизм обеспечивает повышенную скорость и величину перемещения ковша в вертикальном направлении, что необходимо для сокращения времени перевода машины из транспортного положения в рабочее и обратно с образованием достаточного дорожного просвета под ковшом.
Недостатком известного планировщика является сложность конструкции, обуслов- . ленная наличием двух механизмов управления высотным положением рабочего органа,
Известен также планировщик, особенностью которого является наличие только
сл ч
Ч Ч)
одного механизма управления. Этот механизм управления помещен на задней тележке и служит как для регулирования высотного положения ковша в процессе планировки, так и для перевода планиров- щика из транспортного положения в рабочее и обратно. Этот механизм имеет повышенную величину и скорость перемещения и не обеспечивает необходимую точную регулировку высотного положения рабочего органа в процессе планировки, что снижает качество планировочных работ и затрудняет использование систем автоматики.
Целью изобретения является повыше- ние качества планировочных работ.
Это достигается тем, что предлагаемый планировщик снабжен только одним механизмом управления, расположенным на задней тележке. Однако устройство планировщика позволяет с помощью этого механизма производить как точную регулировку высотного положения ковша с малыми величинами скорости и перемещения, так и перевод машины из транспортного положения в рабочее с большей скоростью и перемещением.
Это достигается тем, что на задней тележке установлены двуплечий рычаг и кронштейн, на раме - ролик, причем двуплечий рычаг одним концом соединен с гидроцилиндром механизма управления, на другом конце закреплен сменный кулачок, контактирующий с роликом, а кронштейн установлен с возможностью фиксации в нем двуплечего рычага.
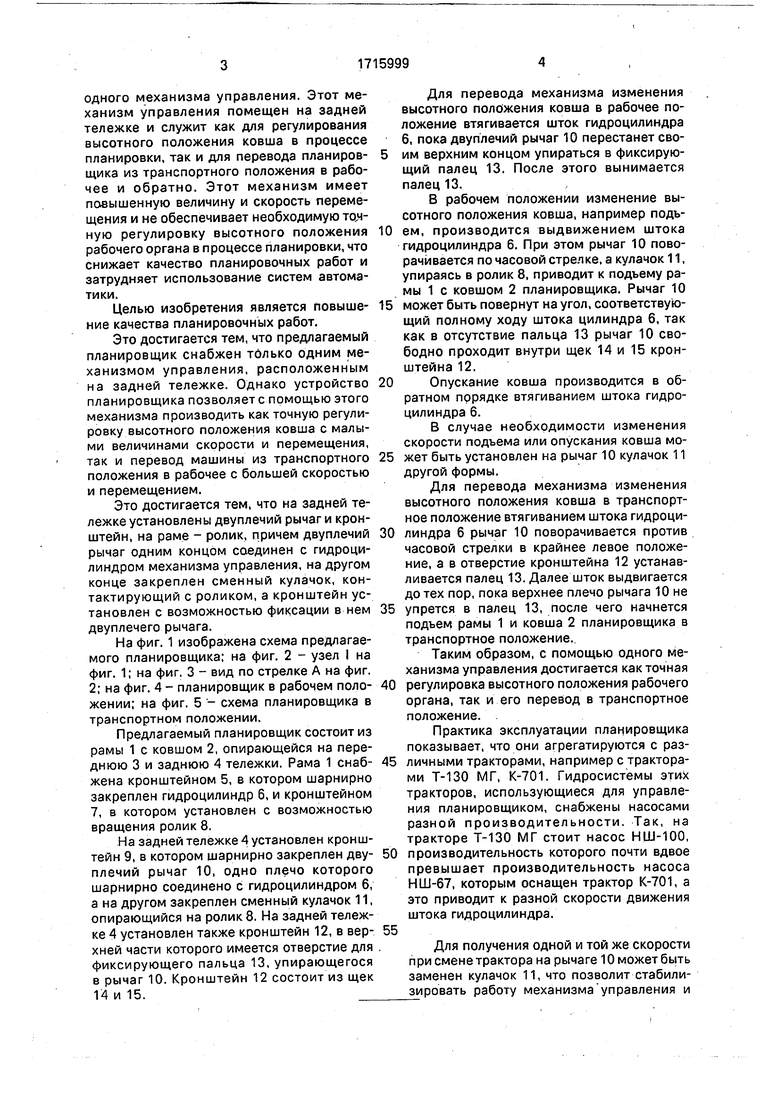
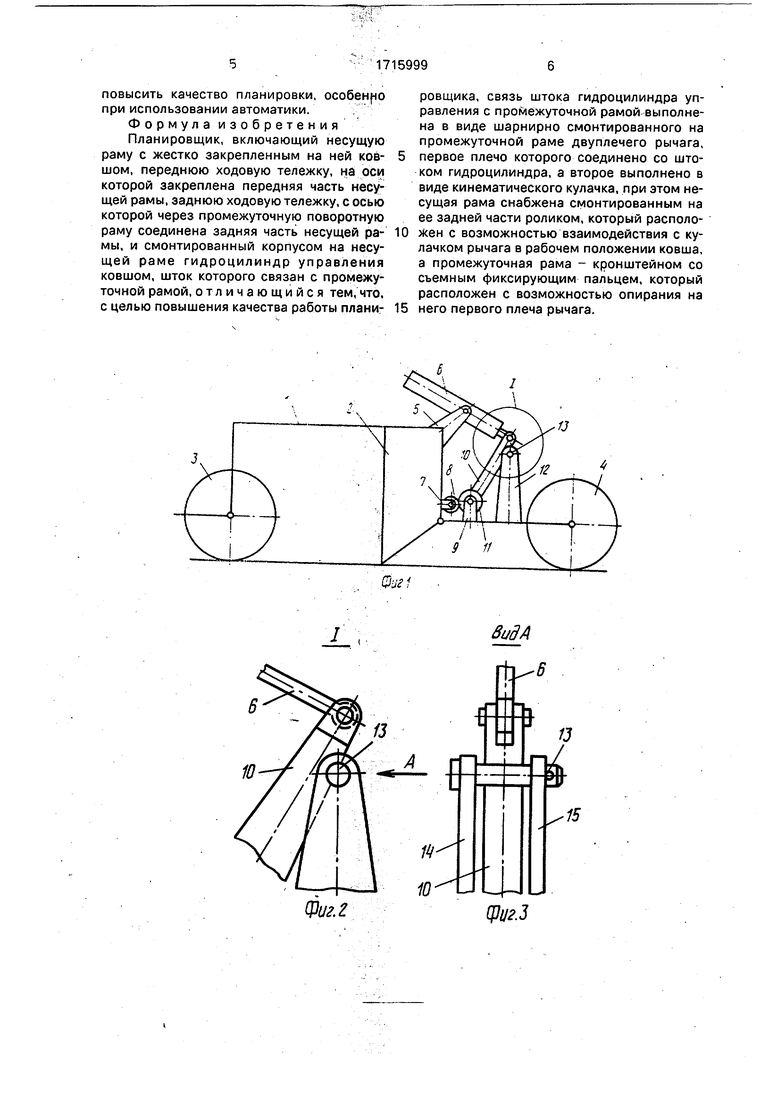
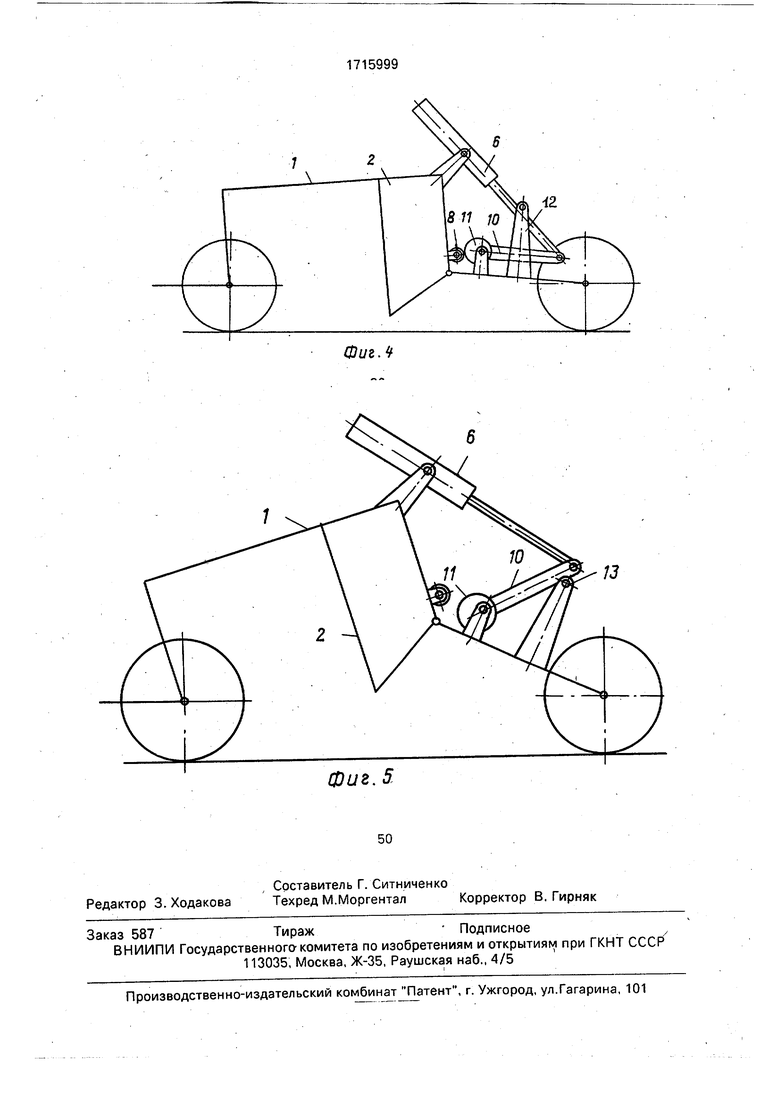
На фиг. 1 изображена схема предлагаемого планировщика; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - вид по стрелке А на фиг. 2; на фиг. 4 - планировщик в рабочем поло- жении; на фиг. 5 - схема планировщика в транспортном положении.
Предлагаемый планировщик состоит из рамы 1 с ковшом 2, опирающейся на переднюю 3 и заднюю 4 тележки. Рама 1 снаб- жена кронштейном 5, в котором шарнирно закреплен гидроцилиндр 6, и кронштейном 7, в котором установлен с возможностью вращения ролик 8.
На задней тележке 4 установлен кронштейн 9, в котором шарнирно закреплен дву- плечий рычаг 10, одно плечо которого шарнирно соединено с гидроцилиндром 6, а на другом закреплен сменный кулачок 11, опирающийся на ролик 8. На задней тележке 4 установлен также кронштейн 12, в вер- хней части которого имеется отверстие для фиксирующего пальца 13, упирающегося в рычаг 10. Кронштейн 12 состоит из щек 14 и 15.
Для перевода механизма изменения высотного положения ковша в рабочее положение втягивается шток гидроцилиндра 6, пока двуплечий рычаг 10 перестанет своим верхним концом упираться в фиксирующий палец 13. После этого вынимается палец 13.
В рабочем положении изменение высотного положения ковша, например подъем, производится выдвижением штока гидроцилиндра 6. При этом рычаг 10 поворачивается по часовой стрелке, а кулачок 11, упираясь в ролик 8, приводит к подъему рамы 1 с ковшом 2 планировщика. Рычаг 10 может быть повернут на угол, соответствующий полному ходу штока цилиндра 6, так как в отсутствие пальца 13 рычаг 10 свободно проходит внутри щек 14 и 15 кронштейна 12.
Опускание ковша производится в обратном пррядке втягиванием штока гидроцилиндра 6.
В случае необходимости изменения скорости подъема или опускания ковша может быть установлен на рычаг 10 кулачок 11 другой формы.
Для перевода механизма изменения высотного положения ковша в транспортное положение втягиванием штока гидроцилиндра 6 рычаг 10 поворачивается против часовой стрелки в крайнее левое положение, а в отверстие кронштейна 12 устанавливается палец 13. Далее шток выдвигается до тех пор, пока верхнее плечо рычага 10 не упрется в палец 13, после чего начнется подъем рамы 1 и ковша 2 планировщика в транспортное положение.
Таким образом, с помощью одного механизма управления достигается как точная регулировка высотного положения рабочего органа, так и его перевод в транспортное положение.
Практика эксплуатации планировщика показывает, что они агрегатируются с различными тракторами, например с тракторами Т-130 МГ, К-701. Гидросистемы этих тракторов, использующиеся для управления планировщиком, снабжены насосами разной производительности. Так, на тракторе Т-130 МГ стоит насос НЦЫОО, производительность которого почти вдвое превышает производительность насоса НШ-67, которым оснащен трактор К-701, а это приводит к разной скорости движения штока гидроцилиндра.
Для получения одной и той же скорости при смене трактора на рычаге 10 может быть заменен кулачок 11, что позволит стабили- ировать работу механизма управления и
повысить качество планировки, особенно при использовании автоматики. Формула изобретения Планировщик, включающий несущую раму с жестко закрепленным на ней ковшом, переднюю ходовую тележку, на оси которой закреплена передняя часть несущей рамы, заднюю ходовую тележку, с осью которой через промежуточную поворотную раму соединена задняя часть несущей рамы, и смонтированный корпусом на несущей раме гидроцилиндр управления ковшом, шток которого связан с промежуточной рамой, отличающийся тем, что, с целью повышения качества работы планировщика, связь штока гидроцилиндра управления с промежуточной рамой выполнена в виде шарнирно смонтированного на промежуточной раме двуплечего рычага,
первое плечо которого соединено со штоком гидроцилиндра, а второе выполнено в виде кинематического кулачка, при этом несущая рама снабжена смонтированным на ее задней части роликом, который расположен с возможностью взаимодействия с кулачком рычага в рабочем положении ковша, а промежуточная рама - кронштейном со съемным фиксирующим пальцем, который расположен с возможностью опирания на
него первого плеча рычага.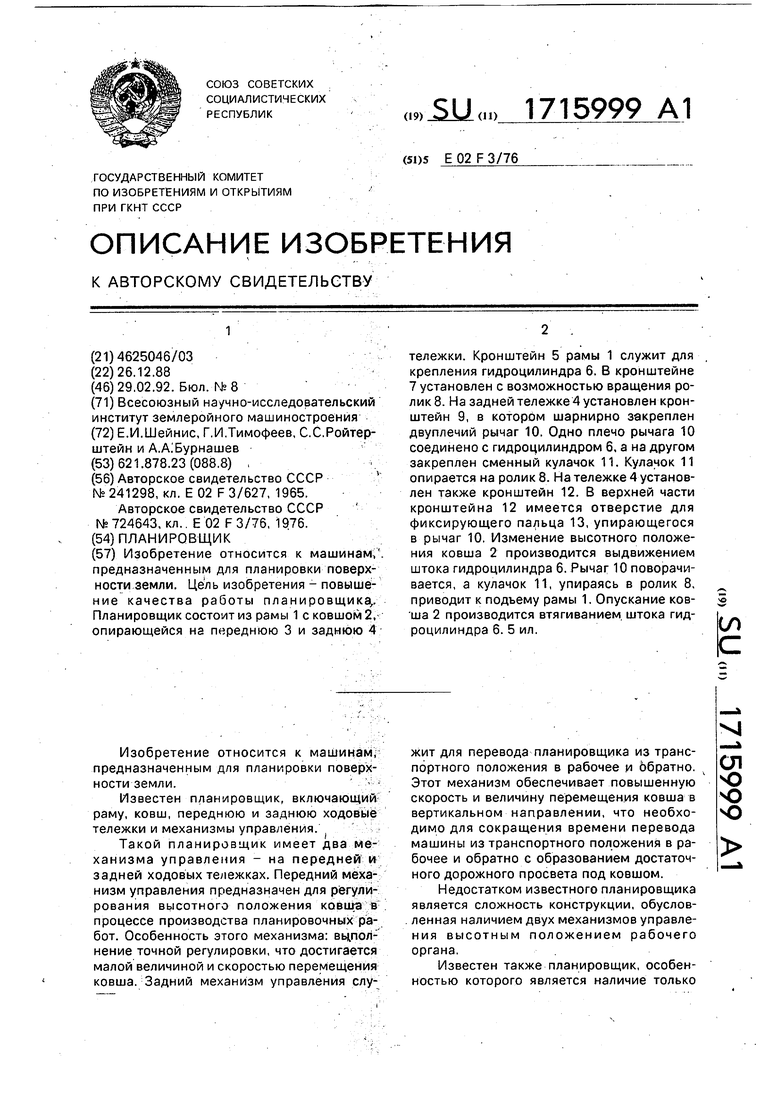
| название | год | авторы | номер документа |
|---|---|---|---|
| Планировочная машина | 1980 |
|
SU909028A1 |
| Планировщик | 1975 |
|
SU619592A1 |
| Длиннобазовый планировщик | 1981 |
|
SU1006631A1 |
| Прицепной планировщик | 1984 |
|
SU1186740A1 |
| Полуприцепной планировщик | 1990 |
|
SU1763588A1 |
| Полуприцепной планировщик (его варианты) | 1983 |
|
SU1113481A1 |
| Планировщик | 1987 |
|
SU1507917A1 |
| Планировщик | 1983 |
|
SU1099009A1 |
| Планировочная машина | 1974 |
|
SU506337A1 |
| Ковш скрепера | 1989 |
|
SU1752879A1 |
Изобретение относится к машинам; , предназначенным для планировки поверхности земли. Цель изобретения - повышение качества работы планировщика,. Планировщик состоит из рамы 1 с ковшом 2, опирающейся на переднюю 3 и заднюю 4 тележки. Кронштейн 5 рамы 1 служит для крепления гидроцилиндра 6. В кронштейне 7 установлен с возможностью вращения ролик 8. На задней тележке 4 установлен кронштейн 9, в котором шарнирно закреплен двуплечий рычаг 10. Одно плечо рычага 10 соединено с гидроцилиндром 6, а на другом закреплен сменный кулачок 11. Кулачок 11 опирается на ролик 8. На тележке 4 установлен также кронштейн 12. В верхней части кронштейна 12 имеется отверстие для фиксирующего пальца 13, упирающегося в рычаг 10. Изменение высотного положения ковша 2 производится выдвижением штока гидроцилиндра 6. Рычаг 10 поворачивается, а кулачок 11, упираясь в ролик 8, приводит к подъему рамы 1. Опускание ков- ша 2 производится втягиванием штока гидроцилиндра 6. 5 ил. со с
1
Фиг. 2
13
видА
13
фцг.З
Фиг. 5
Фиг.1
13
| ПРИЦЕПНОЙ ДЛИННОБАЗОВЫЙ ПЛАНИРОВЩИК | 0 |
|
SU241298A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Планировщик | 1976 |
|
SU724643A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
