шланг и соответствующая арматура. Это приводит к увеличению габаритов подвижной части штока в районе захватной головки и ограничивает возможность работы последней в стесненных условиях, сужает тех- нологические возможности захвата. Наличие гибкого шланга на подвижном штоке снижает надежность захвата из-за частых изгибов шланга;
3) перемещение захватной головки вперед осуществляется пружиной сжатия, кото- рая может обеспечить сравнительно небольшой ход, что ограничивает величину рабочей зоны захвата, снижает его технологические возможности.
Цель изобретения - расширение технологических возможностей захвата.
Поставленная цель достигается тем, что захват манипулятора, содержащий силовой цилиндр с двумя поршнями и коаксиально расположенными штоками, установленными с возможностью продольного взаимного перемещения, при этом внутренний шток кинематически связан с рычагами головки захвата, а наружный жестко соединен с этой головкой, выполнен так, что один поршень установлен в полости другого и подпружинен относительно последнего, а в стенках силового цилиндра выполнены каналы для энергоносителя с возможностью их перекрывания поршнем.
Захватные устройства аналогичного типа известны. Однако настоящее техническое решение обладает следующими отличительными признаками.
В силовом цилиндре два поршня размещены так, что один поршень находится внутри другого и выполнен подпружиненным относительно последнего. В связи с этим захватная головка может осуществлять захват и освобождение предмета при нахождении поршней как в одном, так и в другом конце силового цилиндра.
На стенках, образующих поверхности силового цилиндра, размещен ряд каналов, сообщающих полости силового цилиндра со шлангами, подводящими энергетическую жидкость. В результате захват предмета может осуществляться не только в крайних положениях поршней в силовом цилиндре, но и в любом положении их по длине силового цилиндра, что обеспечивается и регулируется соответственно перекрытием каналов, сообщающих полости силового цилиндра со шлангами, подводящими энерге тическую жидкость.
Это расширяет технологические возможности захвата, так как увеличивает рабочее пространство, обслуживаемое захватом, повышает производительность
-
захвата, снижает габариты подвижной части.
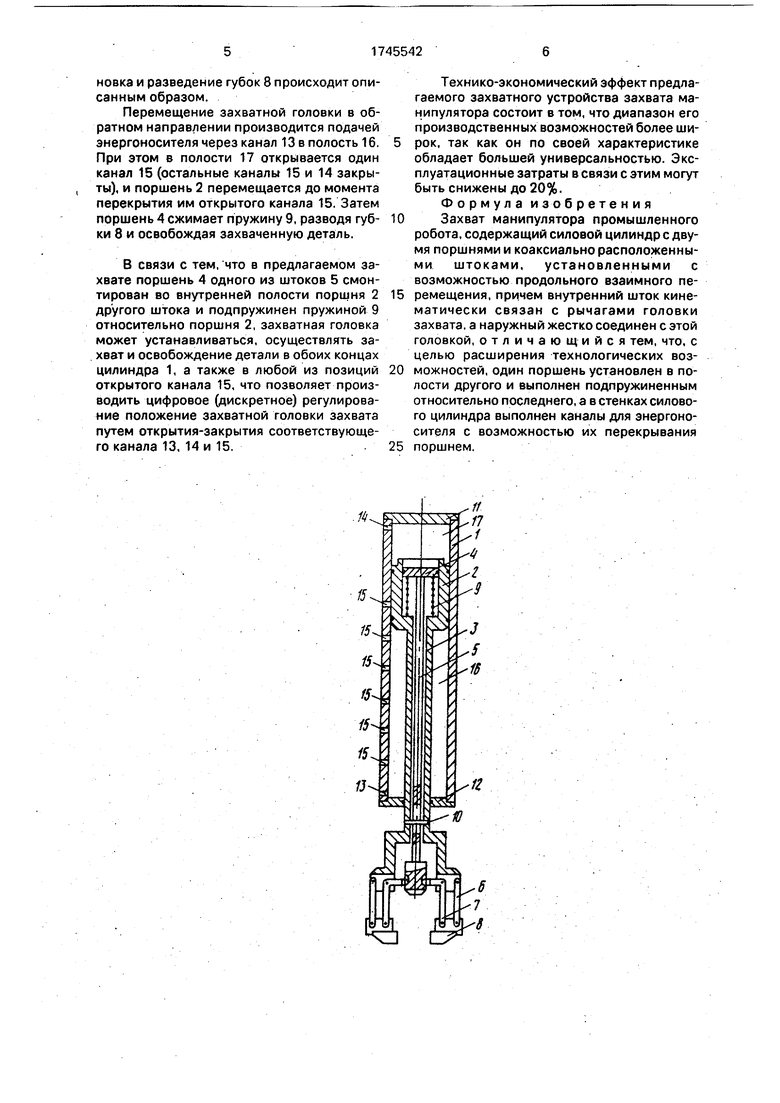
На чертеже схематически изображен предлагаемый захват манипулятора про- 5 мышленного робота.
Захват манипулятора содержит корпус
1цилиндра, в котором расположен поршень
2со штоком 3. Поршень 2 и шток 3 выполнены полыми. Во внутренней полости поршня
102 смонтирован поршень 4, для которого наружный поршень 2 является цилиндром. Внутренний поршень А закреплен на штоке 5, проходящем внутри штока 3 поршня 2. На штоке. 3 жестко крепится головка захвата,
15 состоящая из рычагов 6 и 7, соединенных с зажимными губками 8. Рычаги 7 кинематически связаны со штоком 5. Внутренний поршень 4 подпружинен относительно наружного поршня 2 пружиной 9. Перемеще20 ние штока 5 ограничивается штифтом 10, закрепленным в штоке 3. Корпус цилиндра 1 закрыт крышками 11 и 12. В нем выполнены крайниэ каналы 13 и 14, а также ряд каналов 15, размещенных через необходи25 мые интервалы. Между порогнем 2 и цилиндром 1 образованы штоковая рабочая полость 16 и поршневая рабочая полость 17. Захват манипулятора работает следующим образом.
30 В исходном положении пружина 9 отжимает поршень 4 и сводит зажимные губки 8. Для захвата детали, находящейся впереди захватной головки, в рабочую полость 17 через канал 14 подают энергоноситель
35 (жидкость или газ под давлением). При этом канал 13 и все каналы 15, кроме одного, закрыты. Один из каналов 15, положение которого определяет место остановки захватной головки, открыт и через него осуще40 ствляется сброс энергоносителя в магистраль сброса. Поршень 2 перемещается вперед, вытесняя энергоноситель из што- ковой полости 16 до момента, когда он перекроет открытый канал 15. В этот мо45 мент движение поршня 2 прекращается, по- скольку энергоноситель замыкается в полости 16, так как все каналы 15 и канал 13- в ней закрыты.
После этого перемещается поршень 4,
50 сжимая пружину 9, и зажимные губки 8 разводятся. Производится сброс энергоносителя из полости 17. Поршень 4 возвращается пружиной 9 и зажимные губки 8 захватывают деталь. Зажимная головка перемещается 55 в позицию загрузки захваченной детали, находящуюся, например, впереди захватной головки. Для этого открывается один из каналов 15, расположенный перед поршнем 2 в штоковой полости 16, и энергоноситель подается э полость 17 через канал 14. Остановка и разведение губок 8 происходит описанным образом.
Перемещение захватной головки в обратном направлении производится подачей энергоносителя через канал 13 в полость 16. При этом в полости 17 открывается один канал 15 (остальные каналы 15 и 14 закрыты), и поршень 2 перемещается до момента перекрытия им открытого канала 15. Затем поршень 4 сжимает пружину 9, разводя губ- ки 8 и освобождая захваченную деталь.
В связи с тем, что в предлагаемом захвате поршень 4 одного из штоков 5 смонтирован во внутренней полости поршня 2 другого штока и подпружинен пружиной 9 относительно поршня 2, захватная головка может устанавливаться, осуществлять захват и освобождение детали в обоих концах цилиндра 1, а также в любой из позиций открытого канала 15, что позволяет производить цифровое (дискретное) регулирование положение захватной головки захвата путем открытия-закрытия соответствующего канала 13, 14 и 15.
Технико-экономический эффект предлагаемого захватного устройства захвата манипулятора состоит в том, что диапазон его производственных возможностей более широк, так как он по своей характеристике обладает большей универсальностью. Эксплуатационные затраты в связи с этим могут быть снижены до 20%.
Формула изобретения Захват манипулятора промышленного робота, содержащий силовой цилиндр с двумя поршнями и коаксиально расположенными штоками, установленными с возможностью продольного взаимного перемещения, причем внутренний шток кинематически связан с рычагами головки захвата, а наружный жестко соединен с этой головкой, отличающийся тем, что, с целью расширения технологических возможностей, один поршень установлен в полости другого и выполнен подпружиненным относительно последнего, а в стенках силового цилиндра выполнен каналы для энергоносителя с возможностью их перекрывания поршнем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1980 |
|
SU984861A2 |
| Захват манипулятора | 1979 |
|
SU870111A1 |
| Захватное устройство манипулятора | 1990 |
|
SU1756146A1 |
| Схват манипулятора | 1987 |
|
SU1470500A1 |
| Захватная головка манипулятора | 1980 |
|
SU897379A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Захватное устройство | 1984 |
|
SU1288046A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Вакуумный захватный орган | 1986 |
|
SU1386446A1 |
| Захватное устройство | 1986 |
|
SU1400876A1 |
