1
Изобретение относится к обработке) металлов давлением и может быть использовано на машиностроительных предприятиях.
Известен автомат для резки труП, содержащий станину, на которой расположены два инструментальных блока под прямым углом друг к др.угу, один из которых снабжен ножом с прорезью, а другой - клиновымножом, и механизмы зажима и подачи трубы(1
Недостатком известного автомата является невысокая производительность его работы, а также невозможность обработки труб разного типоразмера.
Цель изобретения-повышение производительности и расширение диапазона типоразмеров получаемых деталей.
Поставленная цель достигается тем, что автомат для резки . труб, содержащий станину, на которой расположены два инструментальных блока под прямым углом друг к другу, один из
которых снабжен ножом с прорезью, а другой - клиновым ножом, и механизмы зажима и подачи трубы, снабжен шпинделем с планшайбой, установленным на станине, механизм подачи трубы выполнен в виде копиров с профильными пазами, два из которых расположены на переднем торце плаТТшайбы, а третий расположен на обратной стороне планшайбы и подпружинен относительно нее, а механизм зажима трубы снабжен ползушкой с подпружиненными губками, расположенными диаметрально относительно ее вертикалью ной оси, кинематически связанной с копиром, расположенным на обратной стороне планшайбы.
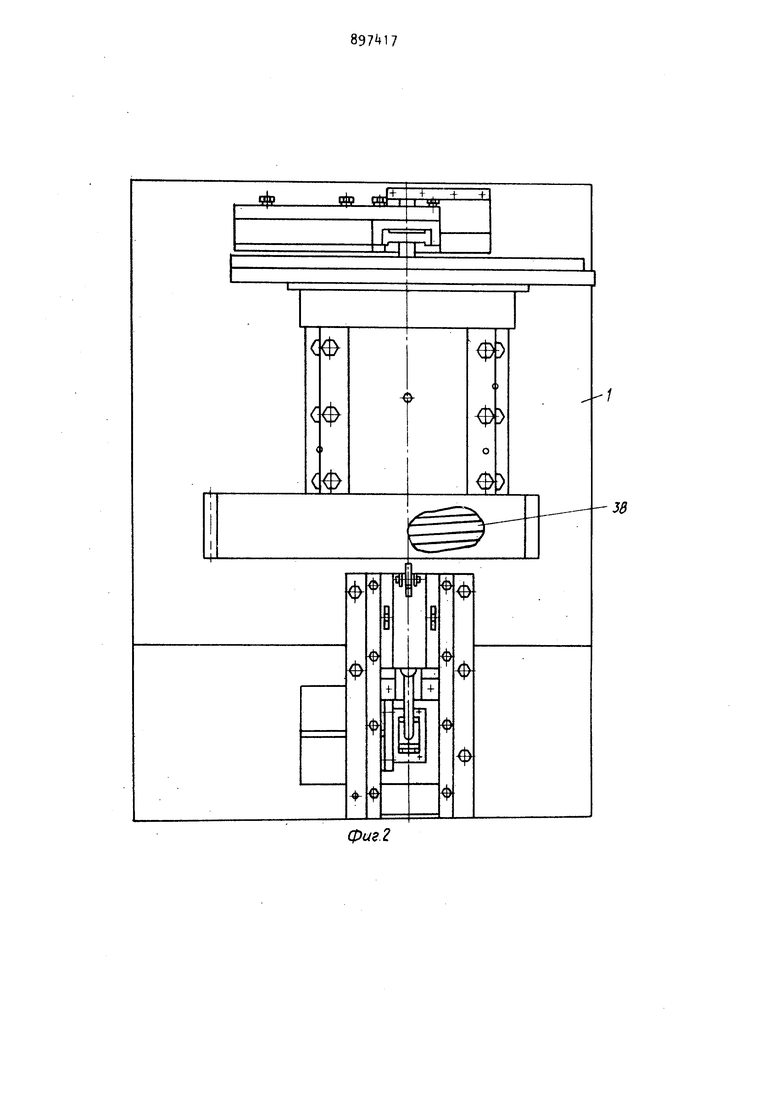
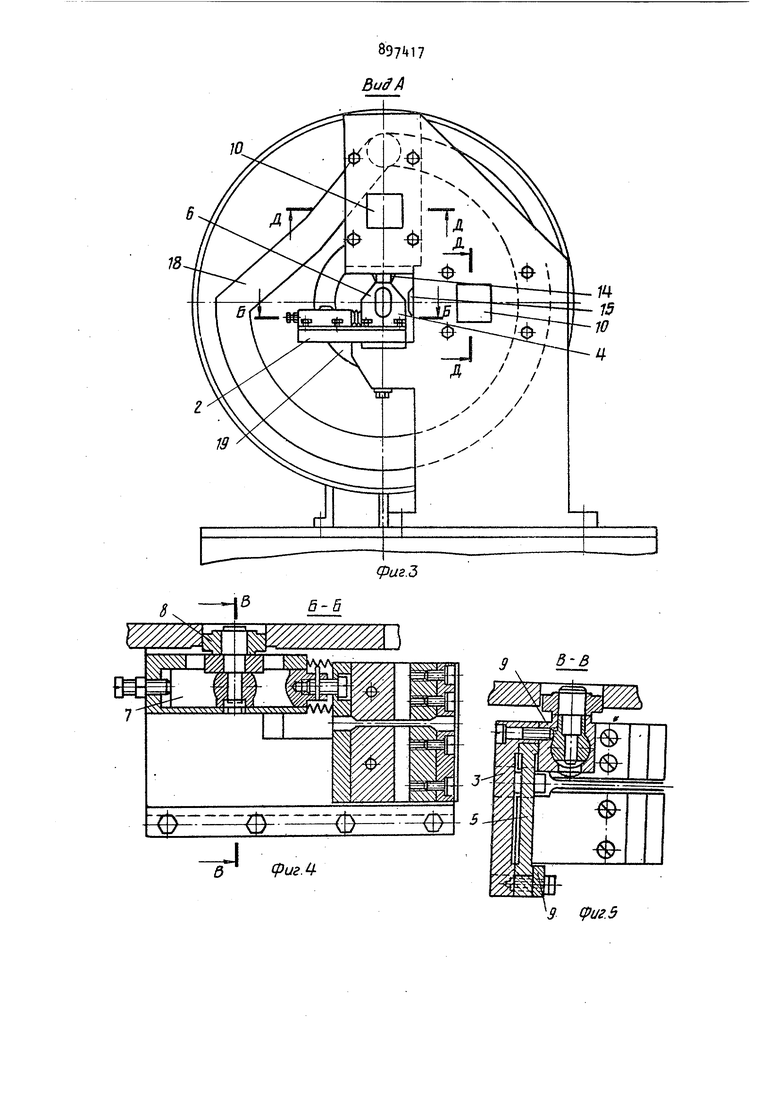
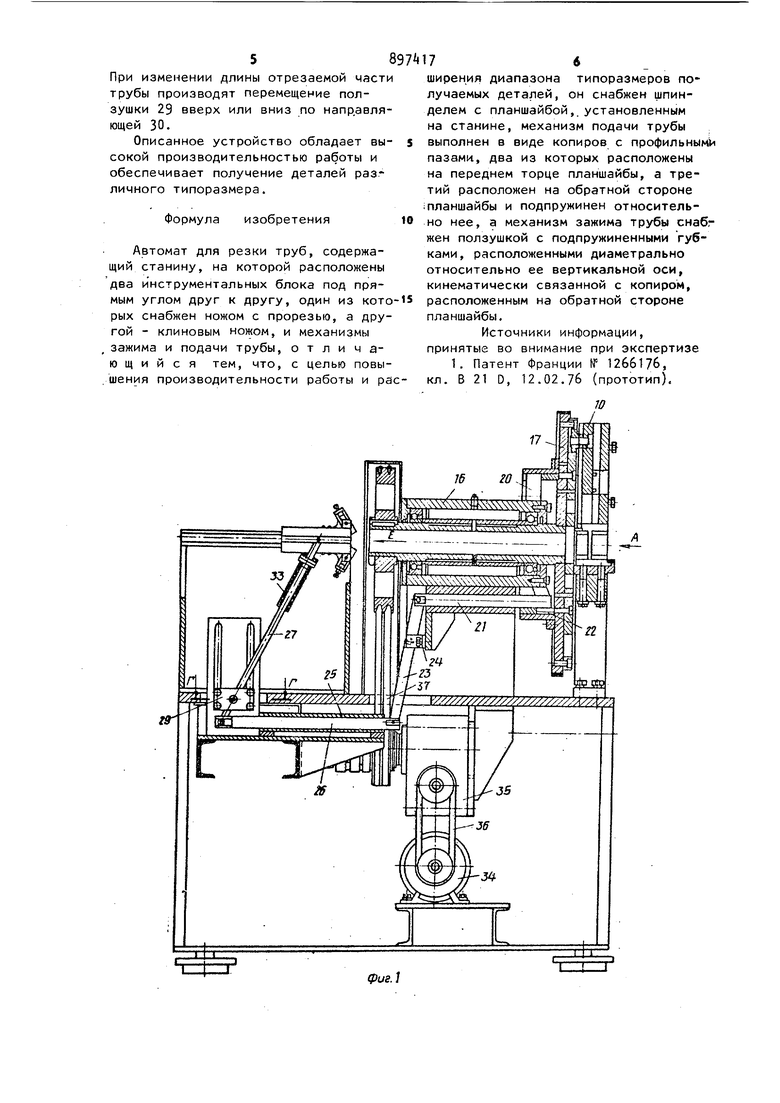
На фиг. 1 изображен предлагаемый автомат, общий вид; на фиг. 2 - то же, вид в плане; на фиг. 3 вид А на фиг. 1; на фиг. k разрез Б-Б на фиг. 3; на фиг. 5 - разрез В-В на фиг. 4; на фиг. 6 - разрез Г-Г на 389 фиг. 1; на фиг. 7 - разрез Д-Д на фиг. 3; на фиг. 8 - вид Е на фиг.1. Автомат содержит станину 1, на которой расположен механизм зажима трубы 2, содержащий направляющую 3 с неподвижной частью 4 разъемной матри цы,в которой размещен ползун f с под вижной частью 6 разъемной матрицы, соединенной с подпружиненным ползуном 7, несущим ролик 8 и прижимные планки 9- Кроме того, на-станине смонтированы два инструментальных блока 10, расположенные под прямым углом друг к другу, каждый из которых содержит направляющую 11, ползун 12 с роликом 13. На одном из пол зунов смонтирован нож 1 с прорезью, а на другом - клиновой нож 15- На станине 1 установлен корпус 1б с расположенным в нем шпинделем 17с планшайбой, на которой с одной сторо ны установлены два пазовых торцевых копира 18 и 19, а с другой - цилинд. рический копир 20, а в корпусе смонтирован ползун 21, связанный с одной стороны с цилиндрическим копиром 20 посредством ролика 22, а с другой стороны с коромыслом 23 установленным на оси кронштейна 2. В направляющей 25 установ лен ползун 26, связанный с одной сто роны с коромыслом 22, ас другой стороны с кулисой 27, расположенной в камне 28 ползушки 29, установленной с возможностью ВОЗВраТНО-ПОСТупа тельного перемещения в направляющей 30. 27 кинематически связана с ползушкой 31, несущей подпружиненные губки 32, посредством направляющей втулки 33. Кроме того, в ста Нине расположен электродвигатель 3, свя занный с червячным редуктором 35 ременной передачей 36, который связа через другую ременную передачу 37 со шкивом 38 установленном на шпинделе. Автомат работает следующим образом Перед пуском автомата разрезаемую трубу вставляют через отверстие в ползушке.31 на заданный размер в момент, когда матрица разомкнута, вертикальный нож k с прорезью находится в верхнем крайнем положении, а горизонтальный клиновой нож 15 в правом крайнем положении, при этом ползушка 31 также находится в крайнем правом положении, а ползушка 29 устанавливается в положение, соответствующее длине отрезаемой части трубы. Указанный момент осуществляется с помощью безконтактного датчика, который отключает электродвигатель З в заданном угле. После этого производится включение автомата. Через клиноременную передачу Зб, редуктор 35, другую клиноременную передачу 37 вращение от электродвигателя передается на шпиндель 17с планшайбой, несущей цилиндричес кий копир 20 и два торцовых копира 18и 19. Один из торцовых копиров 19, вращаясь, производит зажим трубы посредством ролика 8, связанного с подпружиненным ползуном 7, соединенным с подвижной частью 6 матрицы, смонтированной на ползуне. При этом ползушка 31 с подпружиненными губками 32 возвращается в левое крайнее положение посредством ролика 22, связанного с копиром 20, перемещая тем самым ползун 21 в левое крайнее положение, который поворачивает коромысло 23, перемещая ползун 26 в правое крайнее положение, связанный с кулисой 27, которая кинематически связана с ползушкой 31 посредством направляющей втулки 33. Одновременно торцовый копир 18, вращаясь, производит перемещение вертикального ножа 1 с прорезью в нижнее крайнее положение, вырезая тем самым и два симметричных сектора трубы, посредством ролика 13 связанного с-ползуном 12, после чего вертикальный нож 1 с прорезью возвращается в верхнее крайнее положение, а горизонтальный клиновоя нож 1 5 ,в результате в-ращения торцового копира .18,перемещается к оси автомата,отрезая тем самым два остальных сектора и производя окончательную отрезку трубы.Клиновой нож 15 возвращается в первоначальное положение.При дальнейшем вращении цилиндрического , копира 20 ползушка 31 перемещается в (Крайнее правое положение, увлекая за собой разрезаемую трубу подпружиненными губками 32. I При переходе на отрезку трубы другого диаметра производится следуюг щее перемещение подпружиненных губок 32 к оси или от оси автомата, смена вставок подвижной и неподвижной частей разъемной матрицы, в том случае, если имеется значительный перепад диаметра отрезаемой трубы, производится смена плоских ножей 1 и 15. 58 При изменении длины отрезаемой части трубы производят перемещение ползушки 29 вверх или вниз по направляющей 30. Описанное устройство обладает высокой производительностью работы и обеспечивает получение деталей различного типоразмера. Формула изобретения Автомат для резки труб, содержащий станину, на которой расположены два инструментальных блока под прямым углом друг к другу, один из кото рых снабжен ножом с прорезью, а другой - клиновым ножом, и механизмы зажима и подачи трубы, отличающийся тем, что, с целью повышения производительности работы и ра
фиг. 76 ширения диапазона типоразмеров получаемых деталей, он снабжен шпинделем с планшайбой,, установленным на станине, механизм подачи трубы выполнен в виде копиров с профильны 41 пазами, два из которых расположены на переднем торце планшайбы, а третий расположен на обратной стороне планшайбы и подпружинен относительно нее, а механизм зажима трубы снабг жен ползушкой с подпружиненными губками , расположенными диаметрально относительно ее вертикальной оси, кинематически связанной с копиром, расположенным на обратной стороне планшайбы. Источники информации, принятые во внимание при экспертизе 1. Патент Франции № 1266176, кл. В 21 D, 12.02.76 (прототип). fiH fpue.
(pasZ 3 (риг. 5
r-r
Д-Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для резки труб | 1982 |
|
SU1058724A2 |
| Автомат для резки капиллярных труб | 1986 |
|
SU1360919A1 |
| Автомат для резки капиллярных труб | 1981 |
|
SU982859A1 |
| Автомат для мерной резки заготовок | 1973 |
|
SU596343A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ НЕПРЕРЫВНО ДВИЖУЩИХСЯ ТРУБ | 1992 |
|
RU2056981C1 |
| Ножницы для резки сортового проката | 1987 |
|
SU1493396A1 |
| Роторный автомат | 1990 |
|
SU1717317A1 |
| Роторный автомат для нарезания резьбы в гайках | 1982 |
|
SU1076224A1 |
| Автомат для изготовления плоских спиральных пружин | 1975 |
|
SU534286A1 |
| Автомат для двусторонней высадки | 1979 |
|
SU1107945A1 |