(54) АВТОМАТ ДЛЯ МЕРНОЙ РЕЗКИ ЗАГОТОВОК
Механизм правки 3 содержит один направляющий ролик 9 с канавками по числу ручьев и 11равил...ные ролики 10.
Механизм прижима 4 состоит из двух подпружиненных роликов 11, находящихся в постоянном контакте, в одном из которых встроена обгонная муфта (на чертеже не показана).
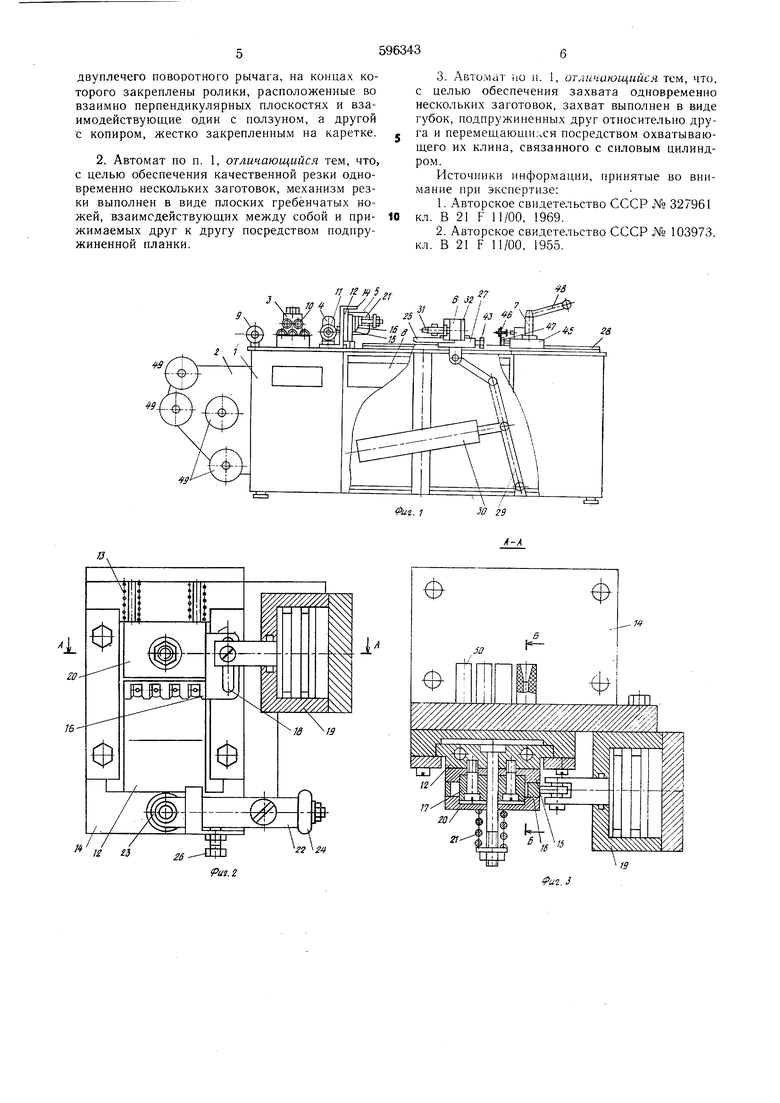
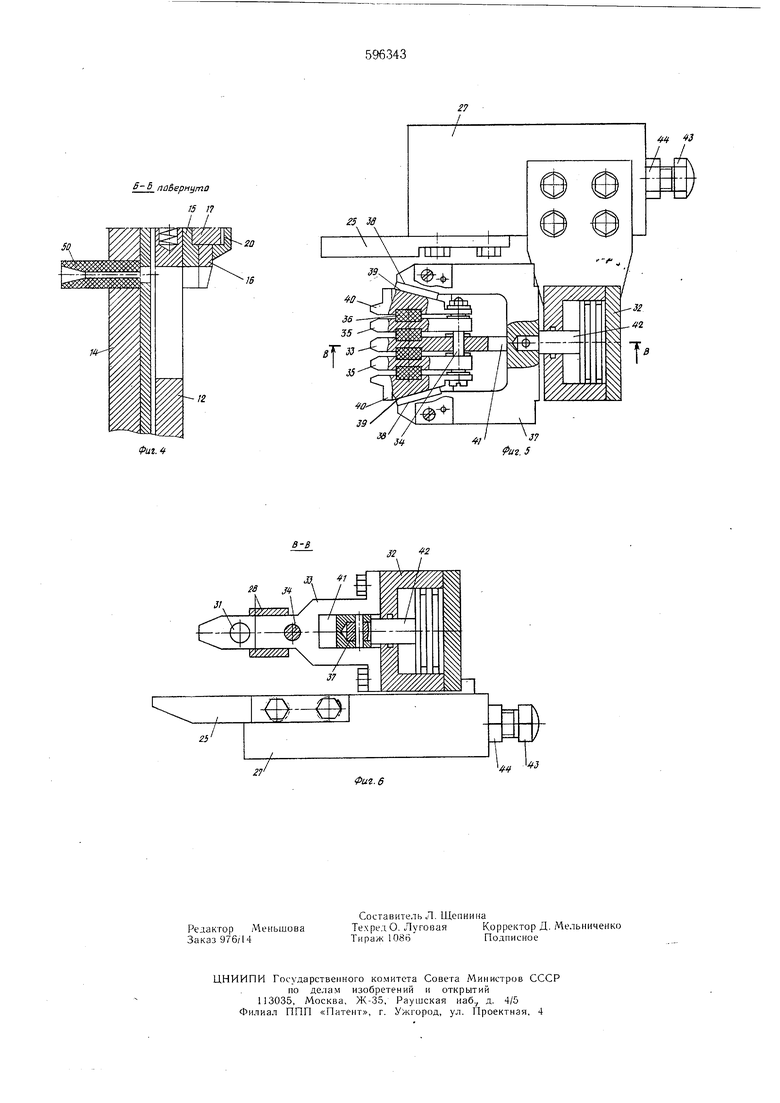
Механизм резки 5 смонтирован на ползуне 12, подпружиненном пружинами 13 относительно кронштейна 14, закрепленного на станине 1. Механизм резки выполнен в виде двух плоских гребенчатых ножей 15 и 16. Нож 15 закреплен на ползуне 12 и имеет направляющую шпонку 17, на которой установлен нож 16 с выемкой; 18 для перемещения относительно силового цилиндра 19. Последний перемешает нож 16 в направлении, перпендикулярном направлению перемещения ползуна. Ножи 15 и 16 прижаты друг к другу при помощи планки 20, подпружиненной пружиной 21.
Узел перемещения ползуна выполнен в виде двуплечего поворотного рычага 22, на концах которого закреплены .ролики 23 и 24, расположенные во взаимно перпендикулярных плоскостях. Ролик 23 взаимодействует с ползуном 12, а ролик 24 - с копиром 25 механизма нодачи 6. Для регулировки положения ползуна 12 имеется регулируемый упор 26.
Механизм подачи 6 смонтирован на каретке 27, перемещаемой по направляющим 28 станины посредством ручажной системы 29, связанной с силовым цилиндром 30. На каретке смонтирован захват 31, связанный с силовым цилиндром 32. Захват 31 выполнен в виде центральной неподвижной губки 33, закрепленной на корпусе силового цилиндра 32 и несущей ось 34, на которой свободно установлены подвижные губки 35, подпружиненные относительно друг друга и центральной губки 33 посредством, например, резиновых шайб 36. Губки 35 перемещаются по направлению к центральной губке 33 при помощи охватывающего их подковообразного клина 37 с клиновыми поверхностями 38, взаимодействующими с клиновыми поверхностями 39 крайних 40 подвижных губок. Клин 37 перемещается в пазу 41 центральной губки 33 при помощи штока 42 силового цилиндра 32.
Для настройки хода каретки 27 имеется регулировочный упорный болт 43 с гайкой 44. Копир 25 закреплен на каретке.
Передвижной фиксируемый упор 7 состоит из основания 45, на котором расположены буферное устройство 46 с концевым выключателем 47, фиксатор 48, фиксирующий упор с определенным шагом по всей длине направляющих 28 станины 1 и прижимной болт (на чертеже не показан)
Авто.мат снабжен пневмоэлектрической схемой управления с путевым переключателем (на чертеже не показан).
Автомат имеет два режима работы: наладочный и автоматический. В наладочно.м режиме производится установка катущек 49 с проводами на катушкодержатель 2, концы проводов пропускаются через механизм правки 3, механиз.м прижима 4 и выводятся через направляющие втулки 50 за механизм резки 5. Включением подвижного ножа 16 производится подрезка концов проводов. Настройка на размер длины отрезаемого провода производится ограничением хода каретки 27 путем перестановки передвижного упора 7 (грубая
настройка) и установки упорного болта 43 (точная настройка) на соответствующий размер.
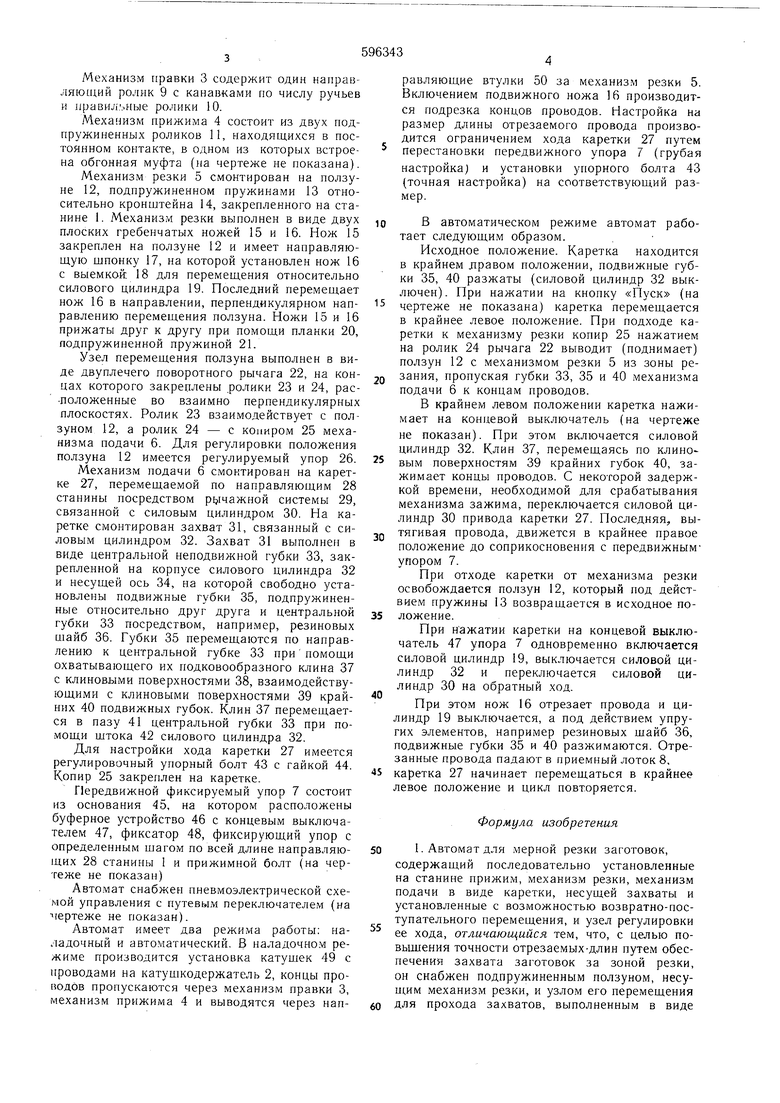
0В автоматическом режиме автомат работает следующим образом.
Исходное положение. Каретка находится в крайнем лравом положении, подвижные губки 35, 40 разжаты (силовой цилиндр 32 выключен). При нажатии на кнопку «Пуск (на
5 чертеже не показана) каретка перемещается в крайнее левое положение. При подходе каретки к механизму резки копир 25 нажатием на ролик 24 рычага 22 выводит (поднимает) ползун 12 с механизмом резки 5 из зоны реQ зания, пропуская губки 33, 35 и 40 механизма подачи 6 к концам проводов.
В крайнем левом положении каретка нажимает на концевой выключатель (на чертеже не показан). При этом включается силовой цилиндр 32. Клин 37, перемещаясь по клиновым поверхностям 39 крайних губок 40, зажимает концы проводов. С некоторой задержкой времени, необходимой для срабатывания механизма зажима, переключается силовой цилиндр 30 привода каретки 27. Последняя, вытягивая провода, движется в крайнее правое положение до соприкосновения с передвижнымупором 7.
При отходе каретки от механизма резки освобождается ползун 12, который под действием пружины 13 возвращается в исходное по5 ложение.
При нажатии каретки на концевой выключатель 47 упора 7 одновременно включается силовой цилиндр 19, выключается силовой цилиндр 32 и переключается силовой цилиндр 30 на обратный ход.
При этом нож 16 отрезает провода и цилиндр 19 выключается, а под действием упругих элементов, например резиновых щайб 36, подвижные губки 35 и 40 разжимаются. Отрезанные провода падают в приемный лоток 8, 5 каретка 27 начинает перемещаться в крайнее левое положение и цикл повторяется.
Формула изобретения
01. Автомат для мерной резки заготовок,
содержащий последовательно установленные на станине прижим, механизм резки, механизм подачи в виде каретки, несущей захваты и установленные с возможностью возвратно-поступательного перемещения, и узел регулировки
ее хода, отличающийся тем, что, с целью повьипения точности отрезаемых-длин путем обеспечения захвата заготовок за зоной резки, он снабжен подпружиненным ползуном, несущим механизм резки, и узло.м его перемещения
0 для прохода захватов, выполненным в виде
двуплечего поворотного рычага, на концах которого закреплены ролики, расположенные во взаимно перпендикулярных плоскостях и вза имодействующие один с ползуном, а другой с копиром, жестко закрепленным на каретке.
2. Автомат по п. 1, отличающийся тем, что, с целью обеспечения качественной резки одновременно нескольких заготовок, механизм резки выполнен в виде плоских гребенчатых ножей, взаимсдействующих между собой и прижимаемых друг к другу посредством подпружиненной планки.
/; fvS }., .,27
,s( J/7««
3. Автомат ио и. 1, отличающийся тем, что, с целью обеспечения захвата одновременно нескольких заготовок, захват выполнен в виде губок, подпружиненных друг относительно друга и перемещаюш.и.ся посредством охватывающего их клина, связанного с силовым цилиндром.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 327961 кл. В 21 F 11/00, 1969.
2.Авторское свидетельство СССР № 103973, кл. В 21 F 11/00, 1955.
-jt,sS.l I -Jil- Фиг. 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для резки труб | 1982 |
|
SU1058724A2 |
| Автомат для резки труб | 1980 |
|
SU897417A1 |
| Автомат для сгибания фигурных изделий | 1981 |
|
SU963646A1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ ЗАКЛЕПОК В КОРПУСА ЦИЛИНДРИЧЕСКИХ ЕМКОСТЕЙ | 1989 |
|
SU1697338A1 |
| Автомат для рубки и чеканки штыря линейного разъема из проволоки | 1979 |
|
SU895586A1 |
| Автомат для резки капиллярных труб | 1986 |
|
SU1360919A1 |
| АВТОМАТ ДЛЯ ОТРЕЗКИ И ЗЕНКОВАНИЯ ТРУБОК | 1973 |
|
SU366035A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ НЕПРЕРЫВНО ДВИЖУЩИХСЯ ТРУБ | 1992 |
|
RU2056981C1 |
| Устройство для наложения ленточного материала на барабан сборочного станка | 1988 |
|
SU1565722A2 |
| Автомат для раздачи концов втулок | 1991 |
|
SU1787626A1 |
22 24
Л
г гз
В- В па&ернуто 5
50,
5
ФигЛ
в-в
J
25
27
Фиг. б
