(54) УСТРОЙСТВО ДЛЯ ФИКСАЦИИ И ЗАЖИМА СПУТНИКА НА РАБОЧИХ ПОЗИЦИЯХ АВТОМАТИЧЕСКОЙ ЛИНИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ БАЗИРОВАНИЯ СТОЛА-СПУТНИКА | 1993 |
|
RU2102217C1 |
| УСТРОЙСТВО ДЛЯ БАЗОВОЙ УСТАНОВКИ ЛАПЫ БУРОВОГО ДОЛОТА ПРИ ЕЕ МЕХАНИЧЕСКОЙ ОБРАБОТКЕ | 2007 |
|
RU2356703C2 |
| ЭНЕРГОРАЗЪЕМ | 1996 |
|
RU2105649C1 |
| Устройство для фиксации втулок в плите-спутнике | 1986 |
|
SU1400848A1 |
| Устройство для установки базовой детали в спутник автоматической линии сборки | 1983 |
|
SU1087299A1 |
| Линия спутникового типа | 1989 |
|
SU1646798A1 |
| Система для манипулирования и закрепления обрабатываемой лопатки | 2023 |
|
RU2818554C1 |
| Устройство для базирования деталей на плоскость и два отверстия | 1980 |
|
SU880688A1 |
| Устройство фиксации спутников цепного транспортера на позициях | 1976 |
|
SU662443A1 |
| Автоматическая сборочная линия спутникового типа | 1984 |
|
SU1359095A1 |
1
Изобретение относится к технологическим процессам по обработке деталей со снятием стружки, а именно к устройствам (спутникам) для фиксации обрабатываемой детали.
Известно устройство для фиксации спутника на две плоскости и одно отверстие I.
Однако указанное устройство имеет ромбический фиксатор, который определяет положение спутника в направлении оси X с погрешностью, зависяш,ей от зазоров в зоне фиксатора. В связи с этим оно находит применение на автоматических линиях со спутниками .небольших размеров.
Модификацией данного устройства может быть конструктивное исполнение фиксации спутника на плоскость и два отверстия с применением выдвижных фиксаторов. Более точное положение спутника в позициях мож/но обеспечить заменой выдвижных фиксаторов базовыми элементами, размещенными на наружной боковой поверхности спутника 2.
Данная установка спутника обеспечивает гарантированный прижим к базовым элементам позиции. Однако при последовательной установке в рабочих позициях возможен поворот спутника в разные стороны от номинального положения.
Известно устройство предусматривающее фиксацию спутника на рабочих позициях автоматической линии двумя призма5 ми по клиновым базовым элементам позиции. Возможность поворота спутника в данном случае практически исключается 3.
Однако в данном случае не исключается неравномерный износ контактных повер.х ностей, так как базовые элементы раз.мещены на боковой поверхности, что обуславливает различие в удельных давлениях на них от воздействия силы тяжести спутника и усилий от инструмента в процессе обра,5 ботки детали. Это приводит к тому, что в процессе эксплуатации из-за неравномерного износа контактных поверхностей происходит параллельное смещение спутника.
Известно также устройство для фикса20 ции и зажима спутника на рабочих позициях автоматической линии, содержащее базовую плиту с двумя базовыми элементами, один из которых выполнен в виде конической втулки, и взаимодействующие с базовыми элементами пальцы, а также размещенные соответственно со стороны, верхней и нижней плоскости базовой плиты упоры и толкатели. В связи с тем, что толкатели размещены со стороны нижней плоскости базовой плиты, поджим спутника осуществляется снизу. Это обуславливает более равномерное распределение давления в контактных поверхностях пары базовый элемент-палец, снижает неравномерность износа, а следовательно, уменьщает величину параллельного смещения спутника 4.
Однако в данном устройстве для уменьщения погрешности установки спутника сопряжения пар втулка-палец выполнены коническими. Вместе с тем применение конических фиксаторов предопределяет высокую точность межосевых расстояний между базовыми элементами и пальцами. Поскольку при изготовлении устройства неизбежны отклонения от указанных межосевых расстояний, то при посадке пальцев во втулки имеют место зазоры между этими элементами, которые предопределяют погрещность базирования спутников по данной схеме. Так как процессы ориентирования и прижима спутника совмещены, то в процессе параллельного перемещения спутника преодолеваются силы сопротивления от трения базовой плиты с толкателями, что вызывает повыщенные удельные давления в контактных поверхностях базовый элемент-палец. В свою очередь из-за повыщенного износа этих поверхностей не обеспечивается точность установки спутника. В связи с размещением базовых элементов на верхней плоскости базовой плиты, не исключаются случаи попадания на контактную поверхность частиц стружки или других предметов, вызывающих резкое нарущение точности фиксации спутника.
Цель изобретения - повыщение точности фиксации спутника.
Цель достигается тем, что второй базовый элемент выполнен в виде призмы, а рабочая поверхность взаимодействующего с нею пальца - в виде двух сопряженных друг с другом цилиндрических поверхностей, параллельных продольной оси базовой плиты и очерченных в поперечном сечении дугами равных окружностей, проведенных с разных центров, при этом рабочая поверхность взаимодействующего с конической втулкой пальца выполнена сферической с радиусом сферы, равным радиусу упомянутой дуги окружности.
Кроме того наиболее экстремальное значение положительного эффекта - повыщение точности фиксации спутника, будет достигнуто в том, случае, когда радиус дуги окружности и радиус сферы определяется по формуле
1,41 -L-t R Ь
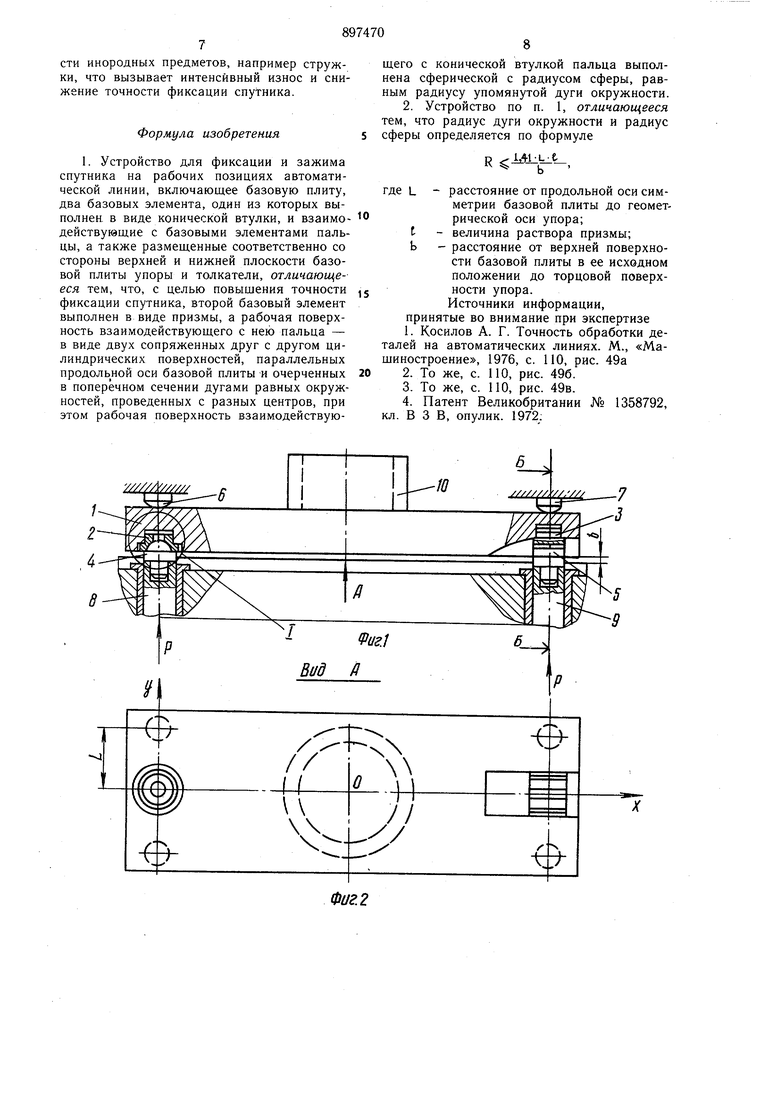
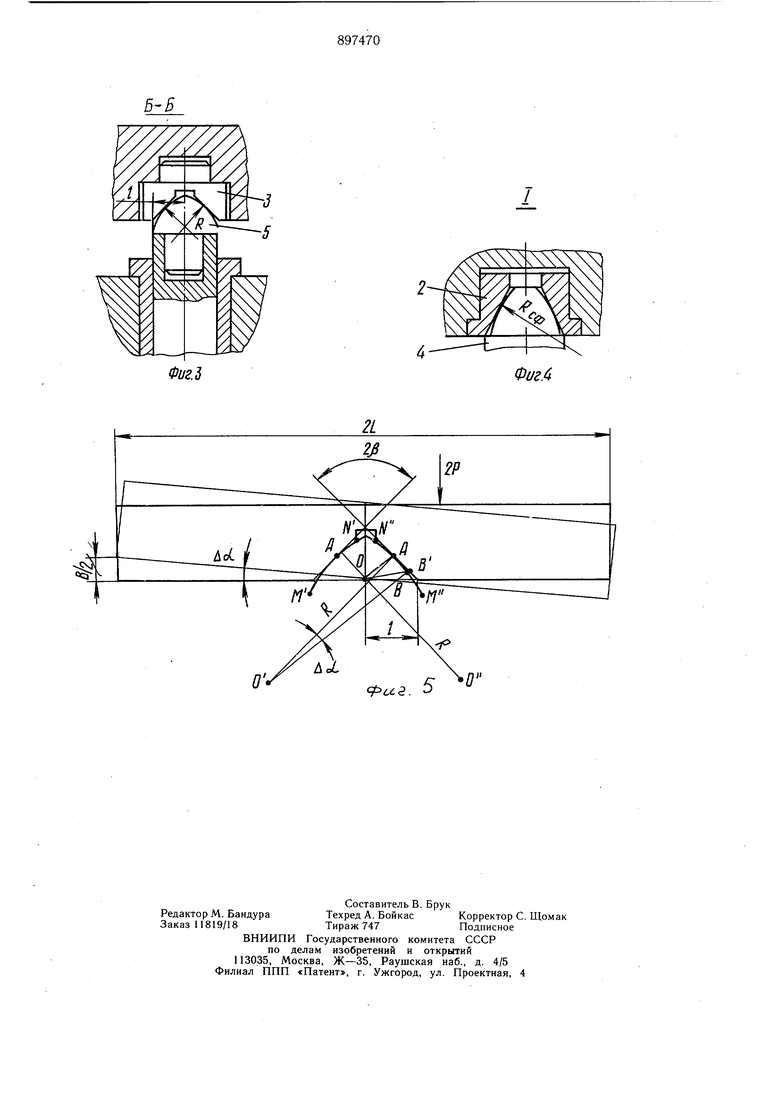
где L - расстояние от продольной оси симметрии базовой плиты до геометрической оси упора; - величина раствора призмы; Ь - расстояние от верхней поверхноности базовой плиты в ее исходном положении до торцовой поверхности упора. На фиг. 1 изображено предлагаемое устройство, частичный разрез; вид сбоку; на фиг. 2 - вид А на фиг. 1; на фиг. 3 сечение Б-Б на фиг. 1; на фиг. 4 - узел I на фиг. 1; на фиг. 5 - схематический вид со стороны призмы на базовую плиту в ее горизонтальном и наклонном положении.
Устройство состоит из базовой плиты 1 (фиг. 1) с двумя базовыми элементами 2 и 3, при этом базовый элемент 2 вьтолнен в виде конической втулки. С базовыми элементами 2 и 3 соответственно взаи.модействуют конический палец 4 и палец 5. Со стороны верхней плоскости базовой плиты 1 размещены упоры 6 и 7, а со стороны нижней ее плоскости - толкатели 8 и 9. На базовой плите 1 размещена обрабатываемая деталь 10. Базовый элемент 3 (фиг. 3) выполнен в виде призмы, а рабочая поверхность взаимодействующего с этой призмой пальца 5 в
виде двух сопряженных друг с другом цилиндрических поверхностей, параллельных продольной оси базовой плиты 1 (ось ОХ на фиг. 2) и очерченных в поперечном сечении дугами MN, и (фиг. 5), равных окружностей с радиусом R, проведенных с центров О и О При этом рабочая поверхность взаимодействующего с конической втулкой 2 (фиг. 4) пальца 4 выполнена сферической с радиусом Нсф,равным радиусу упомянутой дуги окружности, т. е.
0р D
1 -
Кроме того, базовые элементы 2 и 3 (фиг. 1) размещены на нижней плоскости базовой плиты 1, а взаимодействующие с ними пальцы 4 и 5 установлены на толкателях 8 и 9. 5 Радиус R каждой из этих окружностей определяется следующим образом.
Известно, что при сопряжении цилиндра с плоскостью между давлением q, в стыке цилиндр-плоскость, сжимающей силой R,,, приходящейся на единицу длины цилиндра, модулем упругости Ё соприкасающихся тел и радиусом кривизны цилиндрической поверхности существует зависимость
0,
Из формулы вытекает, что,, с целью снижения давления в стыке призма-палец по
предлагаемому изобретению, необходимо радиус кривизны цилиндрической рабочей поверхности пальца выбирать максимальным, поскольку базовая плита 1 (фиг. 1) может подниматься или опускаться на величину зазору в, или перекашиваться в пределах этого зазора, как показано на фиг. 4. Максимальный угол А oi наклона плиты будет в тот момент, когда поднимающийся ее край переместится в вертикальном направлении на величину в. В этом положении базовой плиты справедливо равенство sin . Практика проектирования автоматических линий подтверждает, что в Ьп,а, 6мм Lmin 200 мм. При этих значениях sin Aci 0,015.
Широко известно, что в пределах малых углов синус угла равен этому углу, т. е.
sinAoL Act.
Допускают, что. при повороте базовой плиты на угол происходит перекатывание без скольжения первоначальной линии контакта базового элемента (фиг. 3) по цилиндрической поверхности пальца 5. При этом точка А (фиг. 5) по дуге окружности перемещается в точку В. Максимальный радиус поворота будет в том случае, когда длина дуги будет приближаться к длине линии АВ .
Из треугольника ОАВ при угле призмы
2уВ 90°
АВ V2
Известно, что кривизна окружности равна
А
JL
AS
R
Кривизна окружности представляет собой предел отношения lim- и является величиной обратной радиусу. Из изложенного следует, что максимальное значение радиуса цилиндрической части пальца может быть получено из условия
lim L - L ™ AS R
AS - последнего
следует
выражения
P AEL. - ДА -ДсА.
Подставляя вместо Aoi. его значение - гимеют
1 Jz4jLL:t Ь
где L - расстояние от продольной оси сим метрии базовой плиты до геометрической оси упора; t - величина раствора призмы; Ь - расстояние от верхней поверхности базовой, плиты в ее исходном
положении до торцовой поверхности упора.
Устройство работает следующим образом.
Базовую плиту 1 (фиг. 1) спутника с закрепленной на ней деталью 10 с помощью транспортной системы линии (не показана) перемещают на рабочую позицию. От общей гидросистемы автоматической линии приводят в движение толкатели 8 и 9.
За счет того, что фиксир утощие гнезда выполнены в виде сопрягаемых друг с другом пар коническая втулка 2 - сферический палец 4 и базовый элемент 3, - палец 5 с рабочей поверхностью в виде двух сопряженных цилиндрических поверхностей, обеспечивается самоустановка базовой плиты при подъеме за счет возможности ее поворота вокруг продольной оси. При этом существенным признаком для обеспечения поворота базовой плиты является равенство радиуса сферы сферического пальца и ра диуса цилиндрической поверхности. Кроме того, для предварительной ориентации спутника и его самоустановки в процессе подъема необходимо, чтобы базовые элементы 2 и 3 были размещены на нижней плоскоСТИ базовой плиты, а взаимодействующие
0
с ними пальцы 4 и 5 - на толкателях 8 и 9. Процесс подъема и фиксации спутника заканчивается прижимом верхней плоскости базовой плиты 1 к упорам 6 и 7.
Данная совокупность отличительных
5 признаков позволяет осуществлять процесс ориентации спутника в начальный период его подъема и обеспечивать его самоустановку под собственным весо.м, что снижает износ контактных поверхностей. Кро.ме того,
jj эта же совокупность существенных отличительных признаков практически исключает влияние на величину износа контактных поверхностей неточности изготовл,ения межосевых расстояний между базовы.ми элементами 2 и 3 и пальцами 4 и 5, так как фиксирующие гнезда выполнены в виде пар коническая втулка-сфера и призма-цилиндр. Введение математической зависимости для определения максимального радиуса кривизны цилиндрической поверхности пальца обеспечивает экстремальное значение по0ложительного результата - повышение точности фиксации.
Пальцы 4 и 5, как показано на фиг. 1, могут быть выполнены съемными, что, при необходимости, позволяет быстро их заме5 нить на новые. Размещение базовых элементов на нижней плоскости базовой плиты практически полностью исключает возможность попадания на сопрягаемые поверхности инородных предметов, например стружки, что вызывает интенсивный износ и снижение точности фиксации спутника.
Формула изобретения
R MLk
- расстояние от продольной оси симгде L метрии базовой плиты до геометрической оси упора;
t b
-величина раствора призмы;
-расстояние от верхней поверхности базовой плиты в ее исходном положении до торцовой поверхности упора.
Источники информации, принятые во внимание при экспертизе
Bi/d и
11--х
-10
%г/
-ё
П X/
t;:
