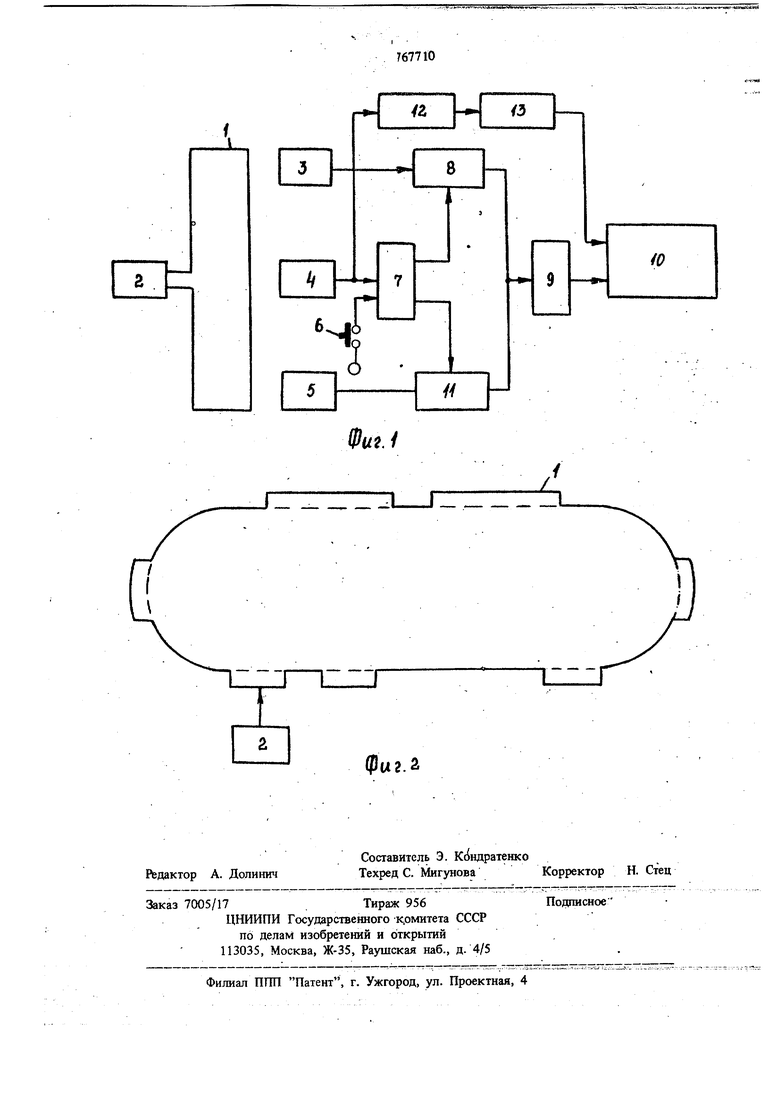
Изобретение относится к автоматизации управления движением самоходного агрегата, например гусеничных тракторов, и может быть использовано при производстве работ с участием самоходной техники. Известно устройство для автоматического управления движением самоходного ai-регата, содержащее датчик сигнала переключения структуры, программный блок, соединенный с сервсшриводами органов управления самоходным агрегатом, к которым подключен преобразующе-усилительный блок, основной чувствительный элемент с индукционным датчиком взаимодействующим с определяк)щим траекторию движения токонесущим проводом, расположенным в местах переключения структуры перпендикулярно траектории и подключенным к генератору 1. Недостатками устройства являются невозможность получения сигналов переключения структуры и автоматического управления двихсением агрегата при использовании одного токонесущего провода с произвольным профи лем трассы. Цель изобретения - расширение функциог юльных возможностей. Указанная цель достигается тем, чтоуст:ройство снабжено, дополнительным чувствительным элементом, расположению на юдной, першндикулярной траектории движения, линии с основным ч1увствительным элементом, на расстоянии от последнего равйом длине части токонесущего Провода, перпендикулярной траектории движения в местах переключения структуры, подключенным к выходу датчика сигнала переключения структуры триггером, соединенными входами соответственно с двумя выходами последаего управляемыми, вентилями, другие входы которых подключены соответственно к выходам основного и дополнительного чувстаительных элементов, а вь1ходы соединены со входом преобразующе-усшштельнбго ;блока, и счетчиком имйульсов, вход которого соединен с выходом датчика сигнала переключения структуры, а выход подключен к программному блоку. На фиг. 1 показана блок-схема предлагаемого устройства; на фиг. 2 - схема прокладки токонесущего провода.
Устройство содержит токонесущий провод 1 штаемый генератором 2 перемёйнбготокаГ и взаимодействующие с ним основной чувствйтельньш элемент 3, датчик 4 сигнала переключения структуры и дополнительный чувствительный элемент 5, причем каждый чувствительный элемент содержит индукционный датчик, кнопку 6 для установки триггера 7 в исходное состояние, вентиль 8, разрешаюп1ий фЪхоадегае сигнала от основного чувствйтельrtoro элемента 3 на вход преобраэующе-усилительного блока 9, управляющего сервоприводами 10 органов управления агрегата,вентиль 11, разрешающий прохождение сигнала от доИэлнйтельного чувствительного элемента 5 на вход преобразующе-усилительного , блока 9, стетчик 12 импульсов, подключенный .к выходу датчика 4 сигнала переключения структуры : и управляющего работой программного блока На трассе, имеющей различную структуру проложен токонесущий провод 1, питаемый генератором 2 переменного тока, и взаимодействующий с чувствительными элементами 3,5 и датчиком 4.
На участках трассы с другой структурой токонесущий провод 1 уложен на расстоянии № траектории движения агрегата (уШовно показано пунктиром) параллельно ей, а в местах смены структуры - перпендикулярно траектории.
Устройство работает следующим образом.
Перёд началом 1гвижёнйя самоходный аТрёгат располагают так, что; / основной чувствительный элемент 3 находится над токонесущим проводом I, распШбШнтШ Ш траекторий даижения агрегата, и нажатием кнопки 6 устанавливают триггер 7 в исходаое положение при которой вьгходное напрясжение с триггера 7 поступает на управляющий вход вентиля 8, разрешающего прохождение сигнала от основного чувствительного элемента 3 на вход нреобразующе-усилительного блока 9, управляющего сервоприводами 10 органов упра1влешис агрегата,. Зентиль 11 закрыт, сигналы дополнительного чувствительного элемента 5 не 1ФОХОДЯТ на вход npeo6pa3yidme-ycH te}ibHoro .- -л,, .При смене структуры (пересечения агрегатом токонесущего проводника перпендЮсулярноге траектории движения) с датчика 4 сигнала переключения структуры/jbpHeHrHipbBaMftOfО таким образом, что напразвленне гладного лепестка его диаграммь совпадает с направлениеем траектории движения агрегата, поступает сигнал йа счетный вход триггера 7, последний перебрасШается и ыходное напряжение с
другого выхода триггера 7 поступает на управляющий вход вен.тиля 11, разрешающего прохождение сигнала от дополнительного чувстви тельного элемента 5 на вход преобразующее
усилительного блока 9.
Сигналы с выхода датчика 4 сигнала переключения структуры поступают также на счетчик 12 импульсов, который управляет работой прог раммного блока 13.
Применение предлагаемого устройства позволяет; полностью автоматизировать управление движением самоходных агрегатов и осуществлять привязку к местности, выполнение технологических операш1й, подъем и опускание
рабочих орудий, изменение режимов работы агрегата.
Формула изобретения
Устройство для автоматического управления; движением самоходного агрегата, содержащее датчик сигнала переключения структуры, программный блок, соеданенный с сервоприво5 дами органов управления самоходным агрегатом, к которым подключен гфеобразующеусидительный блок, основной чувствительный элемент с индукционным датчиком, взаимодействующим с определяющим траекторию
0 даижения токонесзтцим проводом, расположенным в местах переключешя структуры перпендикулярно траектории и подключенным к генерттбру, о т л и ч а ю щ е е с я тем, что, с целью расширения функциональных чозмржнос тей, оно снабжёйо Дополнительным чувствительных элементом, распол эжеййым на одной, перпендикулярной траектории даижения, линии с основным чувстгительным Элементом, на расстоянии от посйеднёго равном длине части токойесущего провода, перпендикулярной траекторий движения в местах переключения структуры, подключетшым к выходу датчика сигнала переключения структуры триггером, ccfeдиненным одними входами .срответственйо
с двумя последне -о двумя управляемыми вентилями, другие входы которых подключены соойетствейно к выходам осйрвного и дополнительного чувствительных элементов, а выхода соединены со входом преОбразующеусилите.льного бУшКа, и счетчиком импульсов, -вход котор6гО т:оейинен с.выходом датчика: сигнала перёйЯюЧейия структуры, а выход подключен к программному блоку.
Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР № 323087, кл, А 01 В 69/04, 1970.
w
Фи. /
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления движением самоходного средства | 1981 |
|
SU976875A1 |
| Устройство для автоматического направления движения самоходных агрегатов | 1977 |
|
SU615880A1 |
| Система группового управления самоходными агрегатами | 1978 |
|
SU880284A1 |
| Система группового управления самоходными агрегатами | 1982 |
|
SU1061716A2 |
| Устройство для управления движением транспортного средства | 1990 |
|
SU1783481A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ | 1971 |
|
SU322142A1 |
| Устройство для автоматического направления движения самоходных агрегатов | 1978 |
|
SU731915A1 |
| Чувствительный элемент системы автоматического управления вождением мобильного агрегата | 1977 |
|
SU791282A1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2530704C1 |
| Система автоматического направления движения самоходных агрегатов | 1980 |
|
SU898974A1 |
фа г. a
