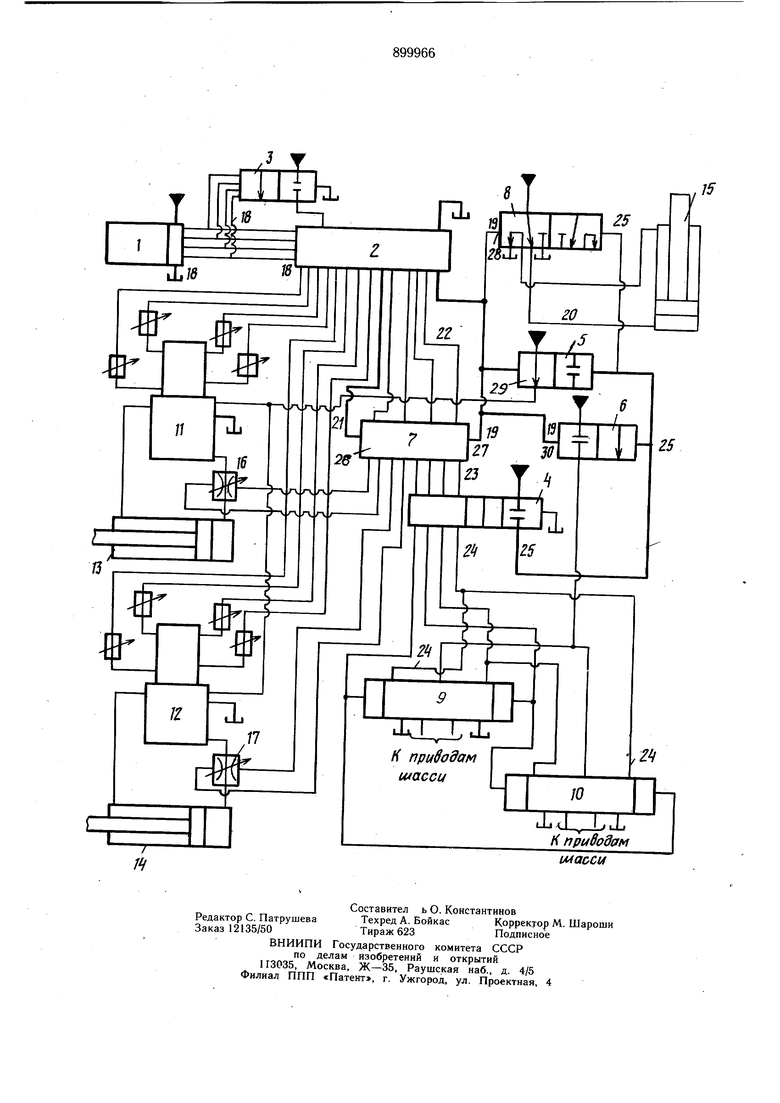
(54) СИСТЕМА УПРАВЛЕНИЯ САМОХОДНЫМ ГИДРОМОНИТОРОМ Изобретение относится к горной промышленности, а именно к системам управления самоходными гидромониторами. Известна система управления самоходным гидромонитором, включающая пульт управления, дешифратор, распределители, логические ячейки ИЛИ и НЕ 1. Однако данная система позволяет передать число команд недостаточное для управления всеми исполнительными органами гидромонитора. Наиболее близким техническим решением является система управления самоходным гидромонитором, включаюш,ая пульт управления, дешифратор, переключатель с двумя управляюпхими полостями, распределитель,две глогические ячейки НЕ с управляюш,ими полостями и две логические ячейки ИЛИ 2. Однако не рациональное соединение управляющих полостей переключателя распределителя и логических ячеек НЕ обуславливает наличие дополнительной логической ячейки НЕ и дополнительной кнопки на пульте, что усложняет устройство. Цель изобретения - упрощение KOHctрукции системы управления самоходным гидромонитором. Цель достигается тем, что два выхода дещифратора соединены с двумя управляющими полостями переключателя, причем один из выходов дешифратора параллельно подключен к управляющим полостям распределителя и двух логических ячеек НЕ. На чертеже показана схема системы управления самоходным гидромонитором. Система управления самоходным гидромонитором содержит пульт 1 управления, дешифратор 2, логические ячейки ИЛИ 3 и 4, логические ячейки НЕ 5 и 6, переключатель 7, распределители , автоматы 11 и 12 с приводами 13 и 14 поворота ствола, распорную стойку 15, дроссели 16 и 17, линии 18-25 связи и полости 26-30 управления. Система работает следующим образом. . При подаче команды с пульта 1, например команды «Стоп жидкость дод дав лением поступает в управляющие полости дешифратора 2 по трубопроводу 18 и одновременно на ячейку ИЛИ 3. При этом золотники дешифратора 2 и ячейки ИЛИ 3 срабатывают, и напорная жидкость от ячейки ИЛИ 3 поступает на дешифратор 2 и далее по трубопроводу 19 в управляющие полости 19, 30, 27 и 28 ячеек НЕ 5 и 6, переключателя 7 и распределителя 8, и переключает их. Тогда ячейка НЕ 5 откроет доступ рабочей жидкости к автоматам 11 и 12 с приводами 13 и 14 поворота ствола, ячейка НЕ 6 закроет доступ рабочей жидкости к распределителям 9 и 10, которые управляют приводами шасси (насжехе не показано). При этом распределитель 8 откроет доступ рабочей жидкости по трубопроводу 20 к распорной стойке 15, которая раскрепит гидромонитор в забое. Переклю-. чатель 7 подготовит передачу команд на регулирование скорости движения приводов 13 и 14 чбрез регулируемые дросселя 16 и 17. При этом на пульте подготовлена группа кнопок для управления стволом, а кнопки управления шасси заблокированы.
Для управления приводами шасси необходимо подать команду «Ход. При этом сработает дешифратор 2 и ячейка ИЛИ 3, рабочая жидкость по трубопроводу 21 поступает в управляющую полость 26 переключателя 7 и подготовит его для пропуска команд на привод шасси. Одновременно на пульте освободит кнопки управления шасси и заблокирует кнопки управления стволом гидромонитора. Тогда при подаче команды, например «Вперед, рабочая жидкость от дешифратора 2, по трубопроводу 22, через переключатель 7, по трубопроводу 23, через ячейку ИЛИ 4 (при этом сработает ячейка ИЛИ), по трубопроводу 24 поступит на распределители 9 и 10, которые подготовят привод для движения шасси гидромонитора вперед. Одновременно рабочая жидкость под
давлением по трубопроводам 25 поступит в управляющие полости ячеек НЕ 5 и 6, распределителя 8 и переключит их. Тогда ячейка НЕ 5 закроет доступ рабочей жидкости к автоматам 11 и 12, а ячейка НЕ 6 откроет доступ жидкости к распределителям 9 и 10 приводов шасси и гидромонитор начнет двигаться вперед. При этом распорная стойка опустится и освободит гидромонитор. Аналогично осуществляется передача других команд.
Таким образом, за счет уменьшения количества кнопок пульта управления и логических ячеек НЕ упрощается конструкция системы управления самоходным гидромонитором.
Формула изобретения
Система управления самоходным гидромонитором, включающая пульт управления, дешифратор, переключатель с двумя управляющими полостями, распределитель, две логические ячейки НЕ с управляющими полостями и логические ячейки ИЛИ, отличающаяся тем, что, с целью упрощания конструкции, два выхода дешифратора соединены с двумя управляющими полостями переключателя, один из выходов дешифратора параллельно подключен к управляющим полостям распределителя и двух логических ячеёй НЕ.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 403954, кл. Е 21 С 45/00, 1969.
2.К вопросу создания самоходного гидромонитора 12РП-1. Труды ВНИИГидроугля,, 1976, с. 45-50 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ САМОХОДНЫМ ГИДРОМОНИТОРОМ | 1973 |
|
SU403854A1 |
| Система управления самоходным гидромонитором | 1982 |
|
SU1065602A1 |
| Система управления самоходным гидромонитором | 1973 |
|
SU488925A2 |
| Система управления самоходным гидромонитором | 1977 |
|
SU715799A1 |
| Система гидравлического управления гидравлическими исполнительными механизмами | 1983 |
|
SU1087668A1 |
| Система управления самоходным гидромонитором | 1978 |
|
SU729353A1 |
| ПРИБОР КОНТРОЛЯ ЗНАНИЙ | 1994 |
|
RU2110096C1 |
| Система для передачи команд телеуправления и телеизмерения | 1974 |
|
SU639002A1 |
| Командно-сигнальный пульт | 1980 |
|
SU943792A1 |
| Пневматическое устройство для дистанционного управления горной машиной с пневмоприводом | 1973 |
|
SU466332A1 |