О5 О1
05
О
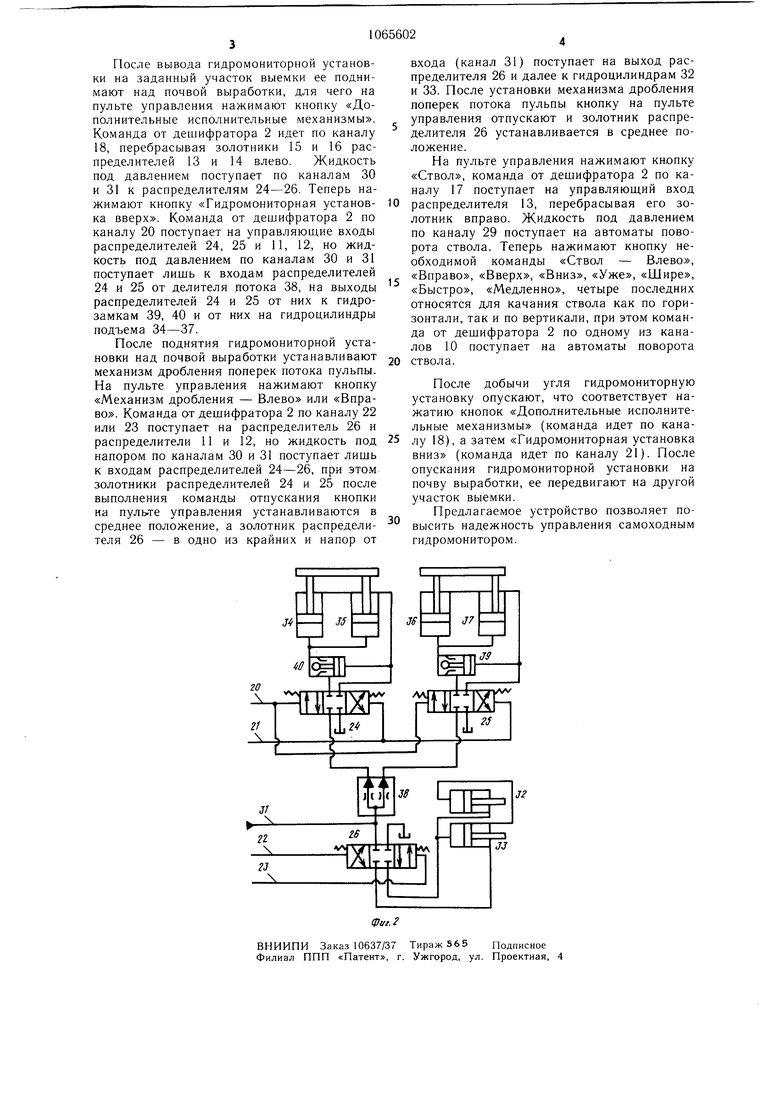
ю Изобретение относится к горной промышленности и предназначено для управления самоходными гидромониторами. Известна система управления самоходным гидромонитором, включающая пульт управления, гидроцилиндры и золотники 1. Недостатком системы является ограниченность команд, которые могут передаваться с пульта управления. Наиболее близким техническим решением к изобретению является система управления самоходным гидромонитором, включающая дешифратор, распределительные ячейки, выполненные в виде логических элементов НЕ, рабочие полости которых последовательно соединены между собой, и распределители исполнительных механизмов 2. Недостатком системы является ее сложность, что снижает надежность управления. 1Делью изобретения является повышение надежности управления самоходным гидро.VlOHHTOpOM. Поставленная цель достигается тем, что в системе управления самоходным гидромонитором, включающей дешифратор, распределительные ячейки, рабочие полости которых последовательно соединены между собой, и распределители исполнительных механизмов, распределительные ячейки выполнены в виде двух гидравлических распределителей, управляющие входы которых соединены параллельно .между собой и с дешифратором, выходы которого гидравлически соединены с распределителями исполнительных механизмов. На фиг. 1 и 2 изображена схема системы управления самоходным гидромонитором. Система управления включает в себя пульт управления 1, соединенный с дешифратором 2 каналами 3-6 и с логическим элементом ИЛИ 7 каналами 8. Fianop на дешифратор 2 подается по каналу 9 от логического эле.мента ИЛИ 7. Дешифратор 2 соединен с автоматами поворота ствола (условно не показаны) каналами 10 и с управляющими входами распределителей 11- 14, в корпусах которых находятся золотники 15 и 16, каналами 17-23, а одновременно и с управляющими входами распределителей 24-26 каналами 20-23. В корпусе логического элемента ИЛИ 7 находится золотник 27. Распределители 11 и 12 соединепы каналами 28 с гидродвигателями шасси (условно не показаны). Подача напора на автоматы поворота ствола осуществляется по каналу 29, а на дополнительные исполнительные механизмы по каналам 30 и 31. Дополнительные исполнительные механизмы включают в себя гидроцилиндры 32 и 33 поворота механизма дробления в горизонтальной плоскости и гидроцилиндры подъема гидромониторной установки над почвой выработки 34-37. Подача напора на гидроцилиндры осуществляется по линии 30 и 31 через распределители 24-26, причем на гидроцилиндры 34-37 через делитель потока 38, чтобы обеспечить равномерный подъем гидромониторной установки. Для предотвращения самоопускания гидромониторной установки, когда они поднята над почвой выработки, служат гидрозамки 39 и 40. Питание исполнительных механизмов осуществляется через распределители 13 и 14, которые соединены следующим образом: один выход распределителя 13 соединен с напорным каналом автоматов поворота ствола каналом 29, а другой каналом 30 соединен с входом распределителя 14, один выход которого каналом 41 соединен с напорным каналом распределителей 11 н 12, гидродвигателей шасси, а другой каналом 31 соединен с распределителями 24-26. При этом управляющие входы распределителей 13 и 14 соединены каналами 17 и 19 с выходами дешифратора 2, а каналом 18 - между собой и с выходом дешифратора 2. Управляющие входы распределителей 24- 26 соединены с управляющими входами распределителей 11 и 12 гидродвигателей шасси и выходами дешифратора 2 каналами 20--23. Система работает следующим образом. При подаче команды с пульта управлекия 1 жидкость под давлением поступает по каналам 3-6 (в различных сочетаниях) на управляю1дие входы дешифратора 2 и одновременно по каналам 8 на входы ячейки ИЛИ 7 и перемещает золотник 27 вправо. При этом жидкость под давлением поступает по каналу 9 в дешифратор 2 и от него в зависимости от команды с пульта управления по одному из каналов 17-22 или 23. Гидромониторную установку выводят на заданный участок выемки, для этого на пУ-ЧЬте управления нажимают кнопку «Дополнительные исполнительные механизмы команда от дешифратора 2 идет по кана- У 18, перебрасывая золотники 15 и 16 распределителей 13 и 14 влево. Теперь нажимают кнопку «Шасси и команда от дешифратора 2 идет по каналу 19, перебрасывая золотник 16 распределителя 14 вправо. Жидкость под давлением идет каналами 30 и 41 на синхронизатор и далее на распределители 11 и 12 гидродвигателей шасси и в зависимости от нажатия на пульте управления одной из кнопок «Гидромониторная установка - Вперед, «Назад, «Влево, «Вправо команда от дешифратора 2 по одному из каналов 20-22 или 23 на управляющие входы распределителей 11, 12 и 24-26, но давление с входа распределителей 11 и 12 (по каналам 30 и 41) поступает на их выходы и давлее на гидродвигатели шасси.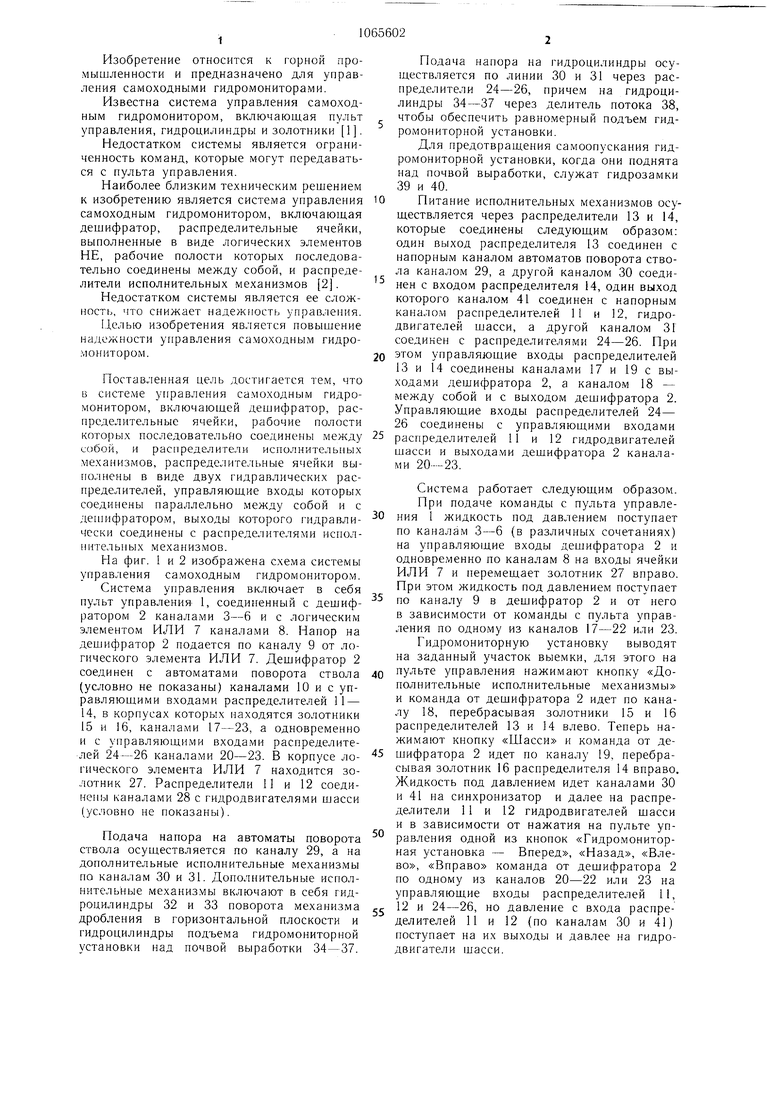
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ САМОХОДНЫМ ГИДРОМОНИТОРОМ | 1973 |
|
SU403854A1 |
| Система управления самоходным гидромонитором | 1979 |
|
SU899966A1 |
| Система управления самоходным гидромонитором | 1973 |
|
SU488925A2 |
| Система гидравлического управления гидравлическими исполнительными механизмами | 1983 |
|
SU1087668A1 |
| Система управления самоходным гидромонитором | 1978 |
|
SU729353A1 |
| Система управления самоходным гидромонитором | 1977 |
|
SU715799A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2215911C1 |
| Позиционный гидропривод | 1982 |
|
SU1071825A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| ГИДРОМОНИТОРНАЯ УСТАНОВКА С ТРУБОПРОВОДОМ ПЕРЕМЕННОЙ ДЛИНЫ | 2010 |
|
RU2459075C1 |
СИСТЕМА УПРАВЛЕНИЯ САМОХОДНЫМ ГИДРОМОНИТОРОМ, включающая дешифратор, распределительные ячейки, рабочие полости которых последовательно соединены между собой, и распределители исполнительных механизмов, отличающаяся тем, что, с целью повышения надежности управления, распределительные ячейки выполнены в виде двух гидравлических распределителей, управляюш,ие входы которых соединены параллельно между собой и с дешифратором, выходы которого гидравлически соединены с распределителями исполнительных механизмов. 8888 i (Л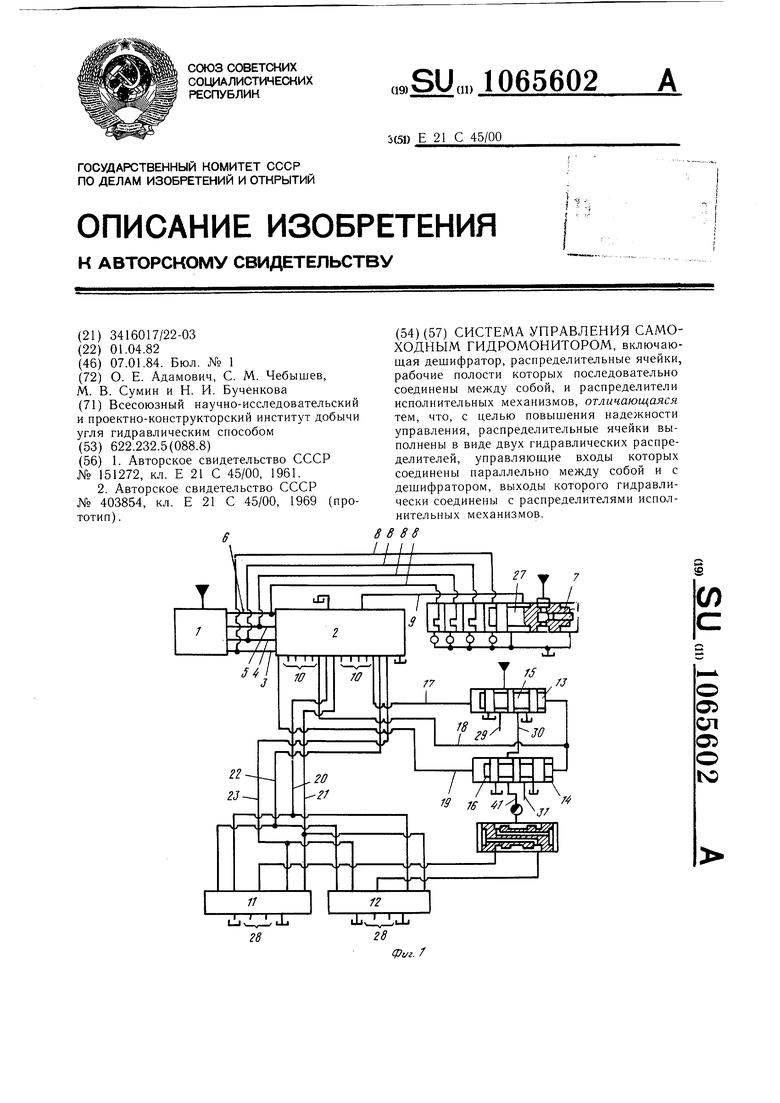
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гидравлическая углевыемочная машина | 1961 |
|
SU151272A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОХОДНЫМ ГИДРОМОНИТОРОМ | 0 |
|
SU403854A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
