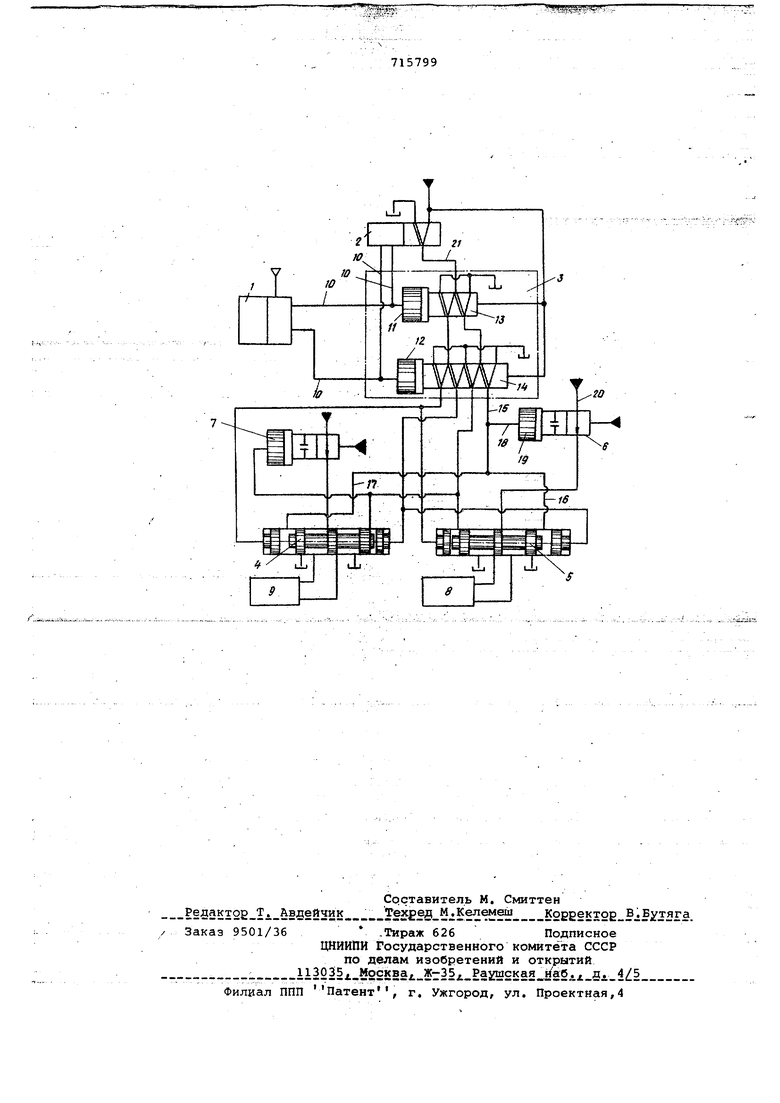
Изобретение относится к области управления самоходнь ш горными мами нами, самоходнымишасси и, в частности, используемое при управлении . самоходнымгидромонитором. Известны системы управления само xoднн 4 шасси, например, система ynpa лейия Движением ходовой части комба на, где управление осуществляется электрическими реверсивными выклю чателями, расположенными в станции .управления 1. При помощи выключателей произ водятся раздельное включение, ос тановка и реверс электродвигателей ходовой части. Поворот ком Ъайна вправо или влево осуществляется включением одного из электродвигателей при неработающем другом ЭJ eктpoдвигaтeлe. Разворот комбайна вправо или влево осуществляется, включением одного из электродвигателей на ход вперед, а другого - на ход назад. Однако эта система не приспособлена для дистанционного управления. Известна система управления само ходны гидромонитором, содержащая пульт дистанционного управления,дешифратор, ячейку ИЛИ гидрав.пические распределители с управляющими полостями и приводы 2. Управленце осуществляется с пульта дистанционного управления путем подачи пяти команд: вперед, назад, влево, вправо и стоп. Поворот (разворот) машины влево и вправо осуществляется движением обеих гусениц одновременно.. Например, поворот (разворот) влево осуществляется движением одновременно правой гусеницы вперед,, а левой - назад. Недостатком известной системы управления является трудность маневрирования машины в шахтных условиях. При повороте машины движением обеих гусениц одновременно центр машины чаще остается без изменения. Поэтому, чтобы установить машину к борту выработки, необходимо приближа.ть ее под малым углом, что приводит к большому расходу времени, Это снижает производительность гидромонитора. , Цель изобретения - повышение производительности системы управления машины. Указанная цель достигается тем, что система снабжена двумя гидравлическими . ячейками НЕ с управляющими ПО.ПОСТЯМИ, которые соединены с, Тп а1Т1яюдамй полостями соответствую° -Щйх 1 «Н:Й1влйчёских распределителей, причем гидравлические ячейки НЕ вклШёны в цепи питания приводов е Г МШрае51йчёсЩ г рашрёзцёлитеЛЯМИ. На чертеже изображена принципиаль WrcxeMr ШстёШ упрйв юйая сущность изобретения, Предлагаемая система содержит nyHbT rifHCTaHiiHOHborO управления, ячейку ИЛИ 2, дешифратор 3 и гиДравли Геские распределители 4 и 5 гидравлические ячейки НЕ б и 7, приводы З и 9,...,,.,..;..,,:-.. .J.:,...Л Пульт 1 дистанционного управления соединен трубопроводами 10 соответ -етвтённО с камерами управления 11 и 12 золотниковых переключателей 13 и 14 дешифратора 3 и ячейкой ИЛИ 2. Выход дешифратора 3 трубопроводами 15, 16 и 17 (соединения элементов обозначены цифрами только для положения Поворот вправо ) подклю tfeH куправляющим полостям гйдравли ческих распределителей 4 и 5, а трубопроводом 18 - к управляющей; полости 19 гидравлической ячейки б, через которую привод iS подключен к цепи питания 20, . ,,„., ,,.,.„4„.... Аналогично подключена ячейка НЕ 7. Выход 21 ячейки или 2 пойК Ш«(ёйТс золотниковому переключателю 13 дешифратора 3, Система работает следующим образом, „. ., . . : при нажатии командной кнопки на - пульте 1, например, команды вправо, рабочая жидкость от пульта 1 по трубопроводу 10 поступает в упра ляющую полость 11 золотникового пере ключателя 13 и перемещает золотник вправо. Жидкость по трубопроводуЮ поступает также на ячейку ИЛИ 2 и включает ее. При этом давление рабочей жидкости по трубопроводу 21 поступает на дешифратор 3, далее че рез дешифратор 3 по трубопроводу 15, 16 и 17 - в управляющие полости гйщзавлйчёских-распределителей 4 и Золотники распределителей 4, 5 пере ключаются для пропуска ра бочей жид к приводам 8 и 9, Одновременн от дешифратора 3 рабочая жидкость по трубопроводу 18 поступает в упра ляющую полость гидравлической ячейк ,НЕ б. Этим перекрывается доступ рабочей жидкости к распределителю 5 vif далее, к приводу 8, При этом при вод 8 будет заторможен. Торможение ривода 8 будет продолжаться до тех пор, пока будет на;жата командная кнопка (команда вправо). При Зтрм движение шасси будет осуществляться за счет привода 9, т.е. за счет движения одной гусеницы. При опускании командной кнопки в , управляющей полости 11 давление будет снято и она сообщается со сливом через ячейку ИЛИ2. Золотниковый переключатель дешифратора 3 возвращаётсй в исходное положение за счет постоянно подведенного давления. Управляющиеполости гидравлических распределителей 4 и 5, а также полость 19 будут сообщены со сливом через золотниковые переключатели 13 и 14 дешифратора 3, Ячейка НЕ б под действием пое г6янн давления открывает доступ рабочей жидкости из трубопровода 20 к распределителю 5 и далее к приводу 8. При этом, поворот будет осуществляться за.счет движения обеих приводов, а, следовательно, и гусениц. Аналогично работает система и при подаче команды влево. Только при подаче команды влево в работе участвует ячейка НЕ 7, которая в йомент подачи команды перекрывает Доступ жидкости к приводу 9. Остальные команды (вперед, назад и стоп) выполняются без участия ячеек НЕ 6 и 7. Формула изобретения Система управления самоходным гидромонитором, содержащая пульт дистанционного управления, дешифратор, ячейку или, гидравлические распределители с управляющими полостя,ми и приводы, отличающаяся тем, что, с целью повьппения производительности, она снабжена двумя гидравлическими ячейками НЕ с управляющими полостями, которые соединены с управляющими полостями соответствующих гидраёличёсКйх распределителей, причем гидравлические ячейки НЕ включены в цепи питания приводов перёд гидравлическими распределителями. .ff . Источники информации, :принятыё во внимание при экспертизе 1. Коленцев М.Т. и др. Угольный комбайн К56М, М.,Недра; 1963. 2. Авторское свидетельство СССР 403854, кл. Е 21 С 45/00, 1973 (прототип).
715799
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ САМОХОДНЫМ ГИДРОМОНИТОРОМ | 1973 |
|
SU403854A1 |
| Система управления самоходным гидромонитором | 1982 |
|
SU1065602A1 |
| Система управления самоходным гидромонитором | 1979 |
|
SU899966A1 |
| Система управления самоходным гидромонитором | 1973 |
|
SU488925A2 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПОДВЕСКОЙ ТРАНСПОРТНОГО СРЕДСТВА | 1967 |
|
SU202742A1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| Система гидравлического управления гидравлическими исполнительными механизмами | 1983 |
|
SU1087668A1 |
| УСТРОЙСТВО ВЫБРОСА РАСПЫЛЕННОЙ СТРУИ | 2015 |
|
RU2718997C2 |
| Пневматическое устройство для дистанционного управления горной машиной с пневмоприводом | 1973 |
|
SU466332A1 |
Т f
3
