(риг 2
Изобретение относится к подъемно- транспортному оборудованию, а именно к устройствам для управления приводами передвижения тележек с гибким подвесом груза.
Цель изобретения - повышение точности.
На фиг. 1 изображено устройство, функциональная схема; на фиг. 2 - привод передвижения тележки, функциональная схема.
Устройство содержит задатчик 1 режима работы, соединенный с входом консервативного блока 2, выход которого через масштабирующий 3 и интегрирующий 4 блок подключен к одному входу сумматора 5, а через масштабирующий блок б-к второму входу сумматора 5. Дифференцирующие блоки 7 и 8 соединены последовательно друг с другом. Выход блока 2 подключен к входу третьего дифференцирующего блока 9, выход которого соединен с входом блока 7 и через масштабирующий блок 10 - с третьим входом сумматора 5. Выходы блоков 7 и 8 подключены к .четвертому и пятому входам сумматора 5 через масштабирующие блоки 11 и 12. Входы регулятора 13 скорости соединены с датчиком 14 скорости тележки 15, датчиком 16 угла отклонения гибкого подвеса 17 тележки и с выходом сумматора 5. Выход регулятора 13 подключен к управляющему входу преобразователя 18, питающего электродвигатель 19 механизма передвижения тележки 15.
Устройство работает следующим обра зом.
При разгоне тележки 15 задатчик 1 фор мирует сигнал прямоугольной формы, соответствующий среднему ускорению тележки. Сигнал на выходе сумматора 5 соответствует заданию по скорости
V Ki/pdt + Кз(. 0) где KI - Ks - масштабные коэффициенты,
р - угол отклонения гибкого подвеса от вертикали.
Регулятор 13 скорости с помощью преобразователя 18 осуществляет регулирова- ние скорости тележки 15 так, чтобы угол отклонения гибкого подвеса от вертикали соответствовал формуле
p(1-cosAt),(2)
где а0 - среднее ускорение тележки; g- ускорение свободного падения; А - частота выну дг-нных колебаний подвеса;
t - время.
В конце разгона тележки по указанным
законам колебания гибкого подвеса отсутствуют.
Формула изобретения
Устройство для управления приводом передвижения тележки с гибким подвесом груза, содержащее консервативный блок, вход которого соединен с задатчиком режима работы, регулятор скорости, входы которого
подключены к датчику скорости тележки, к датчику угла отклонения гибкого подвеса и выходу сумматора, а выход регулятора соединен с управляющим входом привода, дифференцирующие блоки, первые два из
которых соединены последовательно друг с другом, и интегрирующий блок, выход которого подключен к одному входу сумматора, отличающееся тем, что, с целью новы п. .,ия точности, выход консервативного блока связан с входом интегрирующего блока, вторым входом сумматора и входом третьего дифференцирующего блока, выход которого подключен к третьему входу сумматора и входу первого дифференцирующего
блока, при этом выходы первых двух дифференцирующих блоков подключены к четвертому и пятому входам сумматора соответственно.
t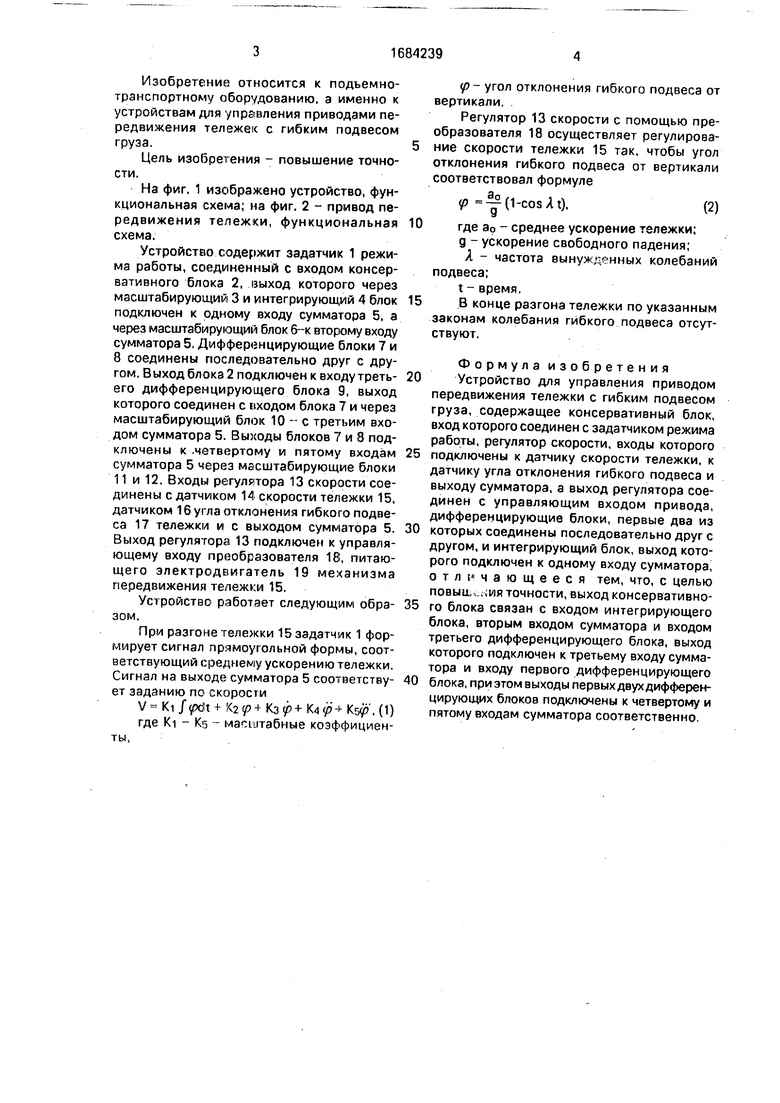
| название | год | авторы | номер документа |
|---|---|---|---|
| Задатчик скорости механизма горизонтального перемещения груза на гибком подвесе | 1988 |
|
SU1646981A1 |
| Устройство для управления электроприводом крановой тележки с грузом на гибком подвесе | 1987 |
|
SU1572986A1 |
| Устройство для управления электроприводом горизонтального перемещения подвешенного на гибком подвесе груза | 1989 |
|
SU1645237A2 |
| Устройство для управления электроприводом горизонтального перемещения груза на гибком подвесе | 1987 |
|
SU1528719A1 |
| Устройство для управления приводом передвижения крановой тележки с гибкой подвеской груза | 1991 |
|
SU1799844A1 |
| Устройство для управления приводом перемещения тележки с гибким подвесом грузозахватного органа | 1988 |
|
SU1558851A1 |
| Устройство для управления электроприводом горизонтального перемещения подвешенного на канате груза | 1986 |
|
SU1379238A1 |
| Устройство для управления электропроводом механизма горизонтального перемещения груза | 1985 |
|
SU1342866A1 |
| Устройство для управления электродвигателем механизма перемещения груза на гибком подвесе | 1990 |
|
SU1799843A1 |
| Система передачи грузов между судами в море | 1988 |
|
SU1594063A1 |
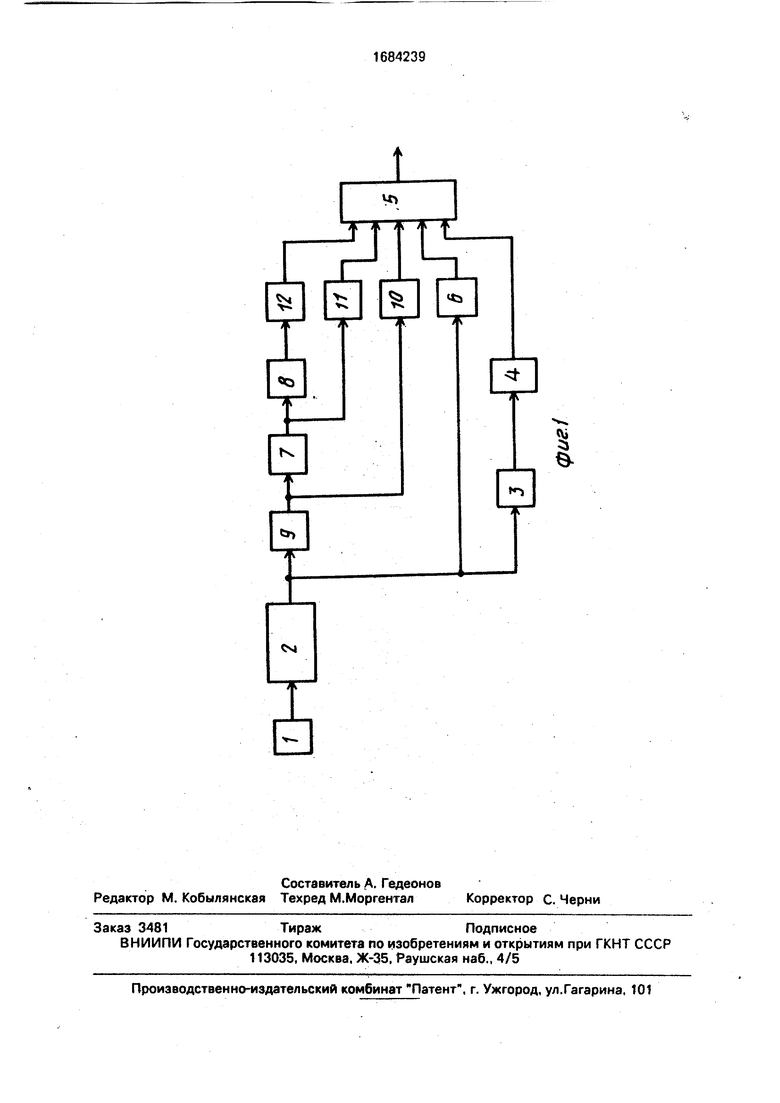
Изобретение относится к подъемно- транспортному оборудованию, а именно к устройствам для управления тележкой с гибким подвесом груза . Цель изобретения - повышение точности. Регулятор 13 скорости управления преобразователем 18, питающим электродвигатель 19 механизма передвижения тележки 15 с гибким подвесом 17 груза. Сигнал задания по скорости поступает на вход регулятора 13 с сумматора 5, а сигналы обратных связей - с датчика 14 скорости и с датчика 16 угла отклонения гибкого подвеса. При разгоне тележки 15 сумматор 5 формирует сигнал задания по скорости, который обрабатывает регулятор 13 с учетом сигналов обратной связи 2 ил
N
$
i
Si
| Устройство для управления приводом перемещения тележки с гибким подвесом грузозахватного органа | 1988 |
|
SU1558851A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
