(54) АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ЗАХВАТА И ПОДЪЕМА ИЗДЕЛИЙ С ВНУТРЕННЕЙ ПОЛОСТЬЮ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический захват для изделий с внутренней полостью | 1977 |
|
SU623807A1 |
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
| Захватное устройство для изделий с отверстием | 1985 |
|
SU1364593A1 |
| Захват | 1981 |
|
SU984862A1 |
| ТЕПЛОСБЕРЕГАЮЩЕЕ УСТРОЙСТВО ДЛЯ ГРУЗОЗАХВАТА | 2016 |
|
RU2627223C1 |
| Захватное устройство для изделий с отверстием | 1988 |
|
SU1527127A2 |
| Автоматический захват для изделий с внутренней полостью | 1980 |
|
SU927717A1 |
| Захватное устройство для длинномерных грузов | 1981 |
|
SU1071565A1 |
| Вакуумное грузозахватное устройство | 1984 |
|
SU1199734A1 |
| Захват для изделий с отверстием | 1987 |
|
SU1449516A1 |
1
Изобретение относится к подъемно-транспортному оборудованию, в частности, может быть использовано в океанографической технике для автономных автоматических буйковых систем гидрологического зондирования при необходимости многократного захвата, подъема и освобождения на заданной высоте зонда, имеющего отрицательную плавучесть..
Известно устройство для захвата и подъема изделий с внутренней полостью, содержащее корпус, подвижный шток, связанный с грузоподъемным средством, и захватные язычки, щ.арнирно установленные на корпусе и выполненные в .виде двуплечих рычагов, взаимодействующих с подвижным щтоком 1.
Однако известный автоматический захват обеспечивает отстропку груза только при ослаблении грузовой тяги и вследствие этого не позволяет освобождать груз, находящийся на весу на заданной высоте подъема или спуска.
Цель изобретения - расширение функциональных возможностей устройства.
Поставленная цель достигается тем, что устройство снабжено упором, жестко связанным с грузоподъемным средством, взаимодействующим со штоком, грузовым тросом, один конец которого связан с корпусом, а другой с грузоподъемным срЛ ством, при этом шток и захватные язычк:; снабжены упругими элементами, а в штоке выполнено сквозное отверстие, через которое проходит грузовой трос.
Кроме того, упругие элементы выполнены в виде витых цилиндрических пружин.
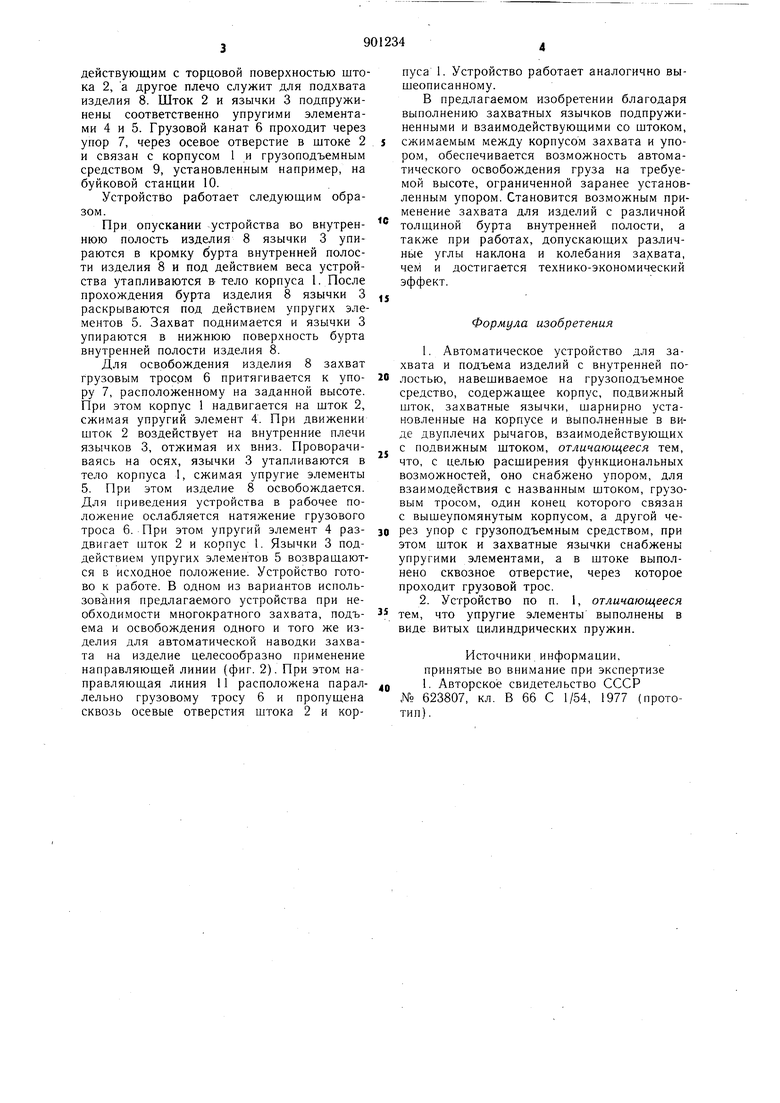
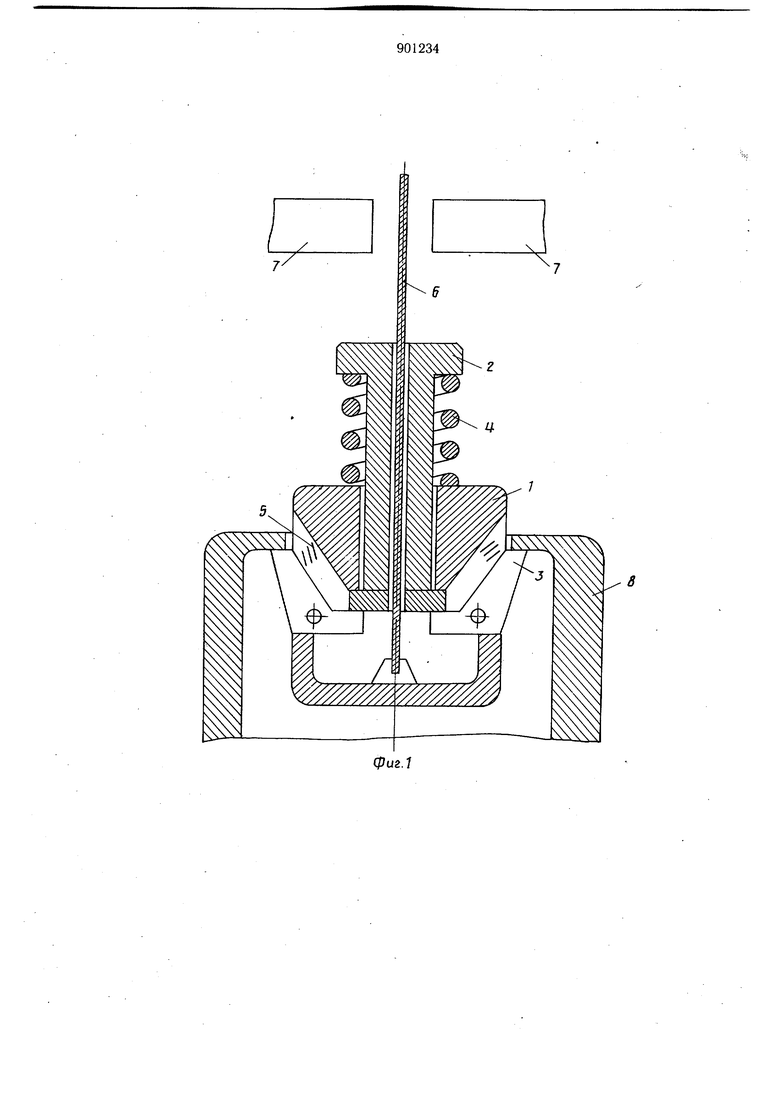
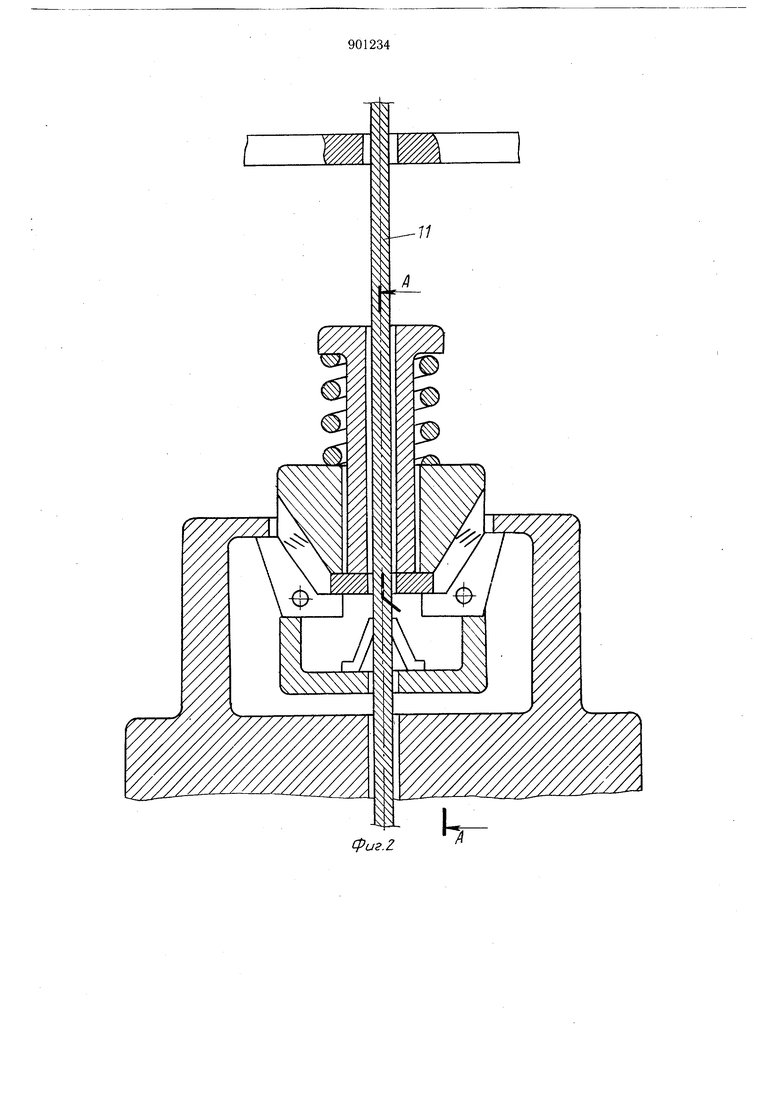
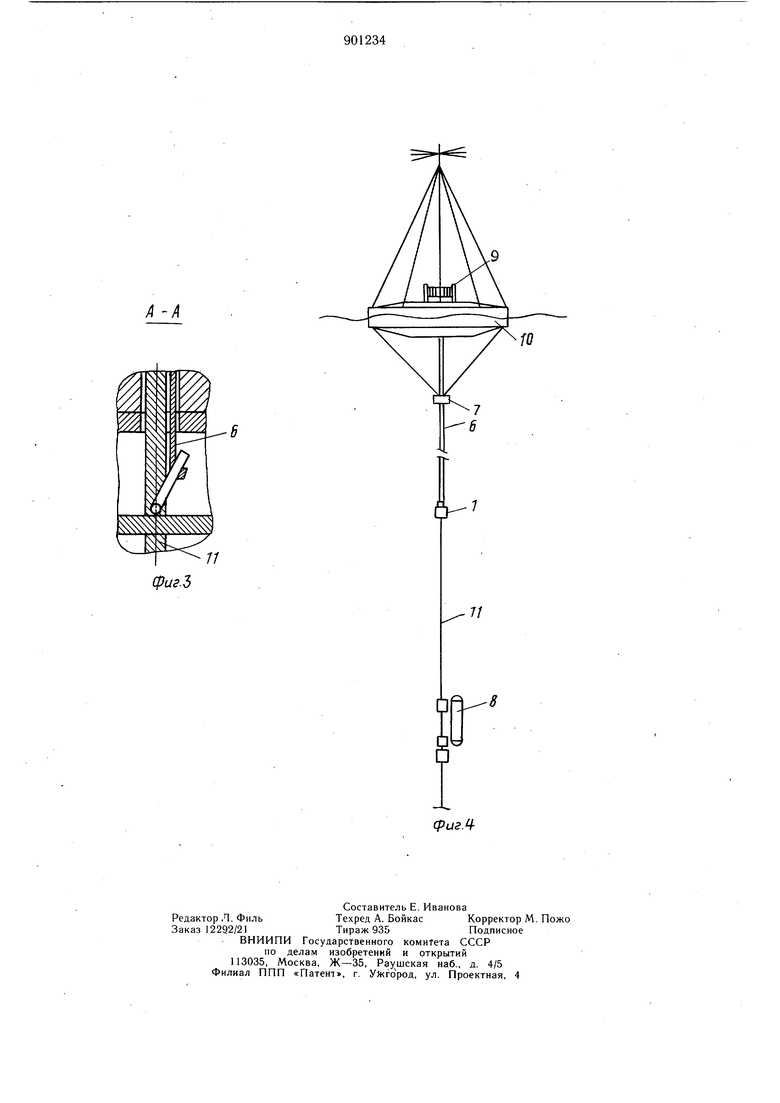
На фиг. 1 показано устройство в момент захвата изделия, разрез; на фиг. 2 - вариант выполнения устройства для работы по направляющей линии; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - устройство, общий вид.
Автоматическое устройство для захвата и подъема изделий с внутренней полостью состоит из захвата, включающего корпус 1, шток 2, захватные язычки 3 и упругие элементы 4 и 5, грузового троса 6 и упора 7. Каждый язычок 3 выполнен в виде двуплечего рычага, установленного на оси с возможностью проворота на определенный угол, требуемый для утапливания язычка в тело корпуса 1. При этом одно из плеч язычка выполнено взаимодействующим с торцовой поверхностью штока 2, а другое плечо служит для подхвата изделия 8. Шток 2 и язычки 3 подпружинены соответственно упругими элементами 4 и 5. Грузовой канат 6 проходит через упор 7, через осевое отверстие в штоке 2 и связан с корпусом 1 и грузоподъемным средством 9, установленным например, на буйковой станции 10.
Устройство работает следующим образом.
При опускании устройства во внутреннюю полость изделия 8 язычки 3 упираются в кромку бурта внутренней полости изделия 8 и под действием веса устройства утапливаются Б тело корпуса 1. После прохождения бурта изделия 8 язычки 3 раскрываются под действием упругих элементов 5. Захват поднимается и язычки 3 упираются в нижнюю поверхность бурта внутренней полости изделия 8.
Для освобождения изделия 8 захват грузовым тросом 6 притягивается к упору 7, расположенному на заданной высоте. При этом корпус 1 надвигается на шток 2, сжимая упругий элемент 4. При движении шток 2 воздействует на внутренние плечи язычков 3, отжимая их вниз. Проворачиваясь на осях, язычки 3 утапливаются в тело корпуса 1, сжимая упругие элементы 5. При этом изделие 8 освобождается. Для приведения устройства в рабочее положение ослабляется натяжение грузового троса 6. При этом упругий элемент 4 раздвигает шток 2 и корпус 1. Язычки 3 поддействием упругих элементов 5 возвращаются в исходное положение. Устройство готово к работе. В одном из вариантов использования предлагаемого устройства при необходимости многократного захвата, подъема и освобождения одного и того же изделия для автоматической наводки захвата на изделие целесообразно применение направляющей линии (фиг. 2). При этом направляющая линия 11 расположена параллельно грузовому тросу 6 и пропущена сквозь осевые отверстия штока 2 и корпуса 1. Устройство работает аналогично вышеописанному.
В предлагаемом изобретении благодаря выполнению захватных язычков подпружиненными и взаимодействующими со щтоком,
сжимаемым между корпусом захвата и упором, обеспечивается возможность автоматического освобождения груза на требуемой высоте, ограниченной заранее установленным упором. Становится возможным применение захвата для изделий с различной
толщиной бурта внутренней полости, а также при работах, допускающих различные углы наклона и колебания захвата, чем и достигается технико-экономический эффект.
Формула изобретения
тем, что упругие элементы выполнены в виде витых цилиндрических пружин.
Источники информации, принятые во внимание при экспертизе Авторское свидетельство СССР
№ 623807, кл. В 66 С 1/54, 1977 (прототип).
4 l
u
