(54) УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА
I
Изобретение относится к устройствам управления тормозным процессом многоколесных транспортных средств и может быть использовано на пассажирском, грузовом, карьерном железнодорожном транспорте, а также на рудничных локомотивах.
Известно устройство управления ipoцессом торможения транспортного средства, содержащее датчики частоты вращет ния контролируемых колес, каждый из которых подключен к одному из входов соответствующего блока србшнения, выходы которых через логический элемент И-НЕ связаны с блоком памяти, датчик линейной скорости С 1.
Известное устройство не позволяет осуществлять процесс торможения в области упругого проскальзывания колес и тем самым максимально использовать резервы сцепления, так как модулирующее устройство эталонного генератора не обеспечивает регулирования частоты опорного сигнала эталонного колеса в
зависимости от условий сцепления, нагрузки на колесо и скорости движения многоколесного транспортного средства.
Целью изобретения является повыщение надежности и эффективности торможения.
Для «того устройство снабжено про- граммно-вадающим блоком и подключенными соответственно к его первому и второму входам датчиком веса и дополнительным блоком памяти, входы которого
to соединены соответственно с выходом блока памяти и третьим входом 1фограммноэадающего блока, выход которого соединен с другими входами блоков сравнения, а четвертый вход - с датчиком линейной
15 скорости.
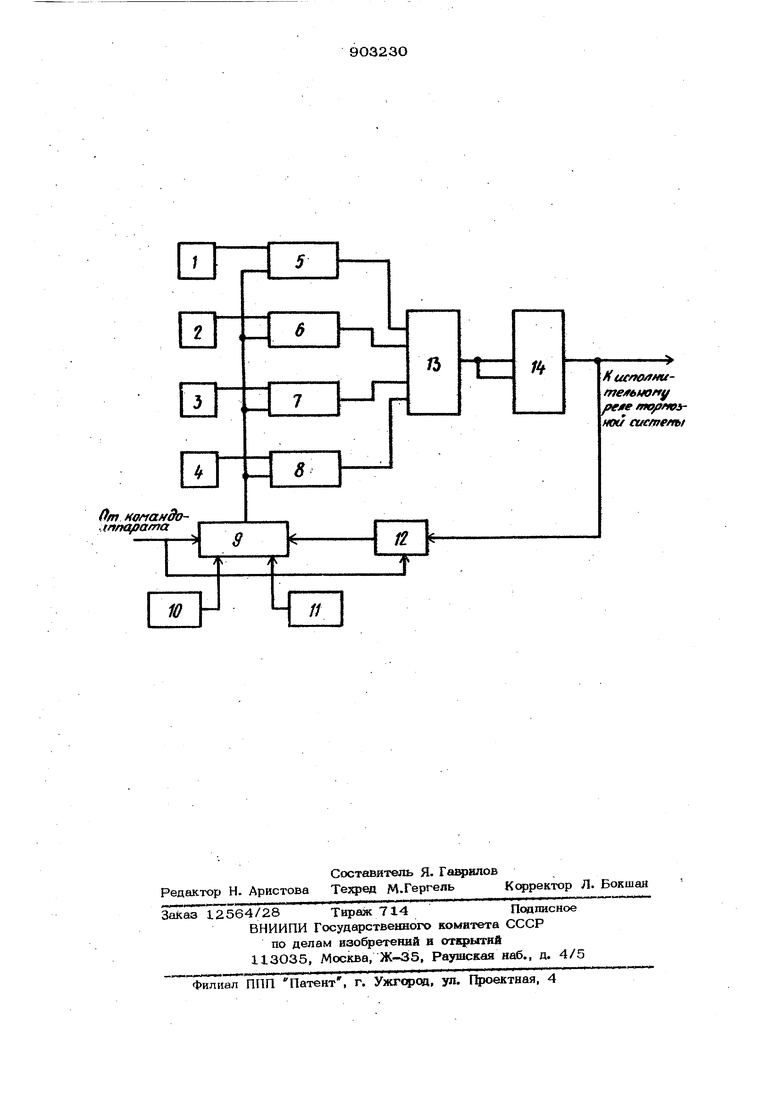
Н.а 15}едставлена блок-схема устройства щзограммного управления щюцессом торможения транспортного средства.
20
Устройство содержит импульсные датчики 1 -4 частоты вращения контрол|фувмых колес, каждый из которых подключен к стирающему входу, соответствующего блока 5-8 сравнения, счетные входы которых соединены с выходом программно-задающего блока 9, входы кото рого соответственно соединены с датчиком 10 веса, датчиком 11 линейной скорости, одним входом и выходом дополнительного блока 12 памяти, представляющего собой триггерное устройство. Выходы блоков 5-8 сравнения через логический элемент И-НЕ 13 связаны с блоком 14 памяти, выход которого гфедназначен для подключения исполнительног реле тормозной системы поезда и соединен с другим входом дополнительного блока 12 памяти. Другой вход блока, 9 1федназначен для подключения выхода командоаппарата, с которого поступает команда на торможение транспортного средства. Блок 9 задания программы отрабатывеет опорный сигнал, частота которого изменяется в функциональной зависимости от веса движущегося транспортного устройства и его линейной скорости. С уменьшением веса или увеличением скорости частота опорного сигнала возрастает, а с увеличением веса или снилсением скорости уменьшается. С этой целью блок задания программы включает анало гончифровой хфеобразователь веса (т.е. нагрузки.на колесо), аналого-цифровой гфеобразователь линейной скорости, сумматор, электронный коммутатор, генератор опорных прямоугольных импульсов и делитель частоты. Вьфабатываемая блоком 9 частота импульсов программы соответствует частоте вращения контролируемых колес в области упругого проскользывания, определяемой реализацией максимально возможных значений коэффициента сцепления при. действующих значениях скорости движения экипа:ка и нагрузки на колесо. При этом на вход блока 9 поступают аналоговые (дискретные) сигналы, определяемые текущими значениями скоросте И нагрузок, и в соответствии с заложенными в памяти блока значениями коэффи циентов сцепления вырабатьШается программная частота опорных импульсов. Так как сила сцепления и соответст вующая ей тормозная сила обуславливаются действующей нагрузкой, скоростью движения и коэффициентом сцепления, значения которого зависят от многих факторов, в том числе и от состояния полотна, то для вьфаботки программного сигнала необходим учет как скорости движения, так и нагрузки (веса экипажа коэффициент сцепления при этом принимается максимально возможным для данных условий с последующей самонастройкой программирующего режима работы системы по его действительным значениям. В качестве датчика веса может служг ть потенциометр, сопротивление которого изменяется в зависимости от величины нагрузки на ось. В качестве датчика линейной скорости может служить тахогенератор, величина вырабатываемой ЭДС. которого пропорциональна скорости движения транспортного устройства. Устройство работает следующим образом. При двилсении транспортного устройства сигналы от датчика веса 10 и датчика линейной скорости 11 поступают в виде аналоговых величин на соответствующее аналого-цифровые преобразователи, которые вьздают дискретное значение веса и скорости. Эта, информация поступает в сумматор блока задания программы 9, где происходит сложение этих сигналов. Полученный суммарный сигнал посредством электронного коммутатора и делителя частоты коммутирует необходимую частоту задающей программы- опорного генератора импульсов. При введении тормоза в действие по сигналу с командоаппарата включает блок задания программы и стирается сигнал в блоке памяти 12, если он там имелся. При этом на счетный вход блоков сравнения 5 - 8 подаются импульсы задающей программы. При движении колесной пары без юза с допустимым проскользыванием сигналы датчиков 1-4 контролируемых осей периодически поступают на стирающие входы соответствующих блоков сравнения, в результате чего сигналы не записываются в блоке памяти 14, что соответствует замедлению колеса в допустимых пределах. Если проскальзывание какого-1шбудь колеса или колесной пары превьпиает допустимые пределы и колесо начинает переходить на юз, то сигнал от датчика этой оси приходит на стирающий вход соответствующего блока сравнения с опозданием (или совсем не приходит в случае полного юза), вследствие чего сигнал от блока задания программы поступает через соответствующий блок сравнения и логический элемент И-НЕ 13 на оба входа блока памяти 14. В результате на выходе блока памяти появляется сигнал, который дает команду на отпуск тормоза, и сохраняется до тех пор, пока
колесо не восстановит свое вращение. При этом с выхода противоблокировочной системы по цепи обратной связи сигнал также поступает на блок памяти 12.
После восстановления колесом вращения датчик этого колеса стирает первым поступившим импульсом сигнал в соотг ветствующем блоке сравнения и через логический элемент И-НЕ 13 возвращает блок памяти 14 в исходное состояние Процесс торможения возобновляется.
При повторном юзе сигнал с выхода гфотивоблокировочного устройства, поступивший в блок памяти 12, возвращает ег в исходное состояние, а на выходе памяти появляется сигнал, поступление которото на блок задания гфограммы 9 вызывает корректировку гфограммы посредством уменьщения частоты опорных импульсов делителя частотьи
Исходная программа частоты опорных импульсов формируется исходя из условия, что коэффициент сцепления имеет . максимально возможное значение.
Если же в щэоцессе торможения фактический коэффициентсцепления оказался меньше максимально возможного, противоблокировочная системы посредством автоматической корректировки гфограммы стремится реализовать экстремальное значение коэффициента сцепления за счет увеличения степени щхжкальзывания колес, не доводя их в то же время до состояния полного юаа
Таким образом, устройство хфограм много ухфавления процессом тчрмокения
транспортного средства работает в режиме самонастройкн по максимуму реализуемым коэф4ш1иента сцепления, что позволяет повысить эффективность торможения.
Формула изобретения
Устройство программного-утфавления 1фоцессом торможения транспсфтного средства, содержащее датчики частоты вращения контрол{фуёмьос колес, каждый из которых подключен к одному нз входов соответствующего блока сравнения, выходы которых через логический элемент И-НЕ связаны с блоком памяти, датчик линейной скорости, отличаю Lieeс я тем, что, с целью повышения надежности и эффективности торможения, оно снабжено 1фограммнозадающим блоком и подключенными соответственно к его новому и второму входам датчиком веса и дополнительным блоком памяти, входы которого соединены соответственно с выходом блока памяти и третьим входом фограммно-оадающегр блока, выход которого соединен с другими входами блоко сравнения, а четвертый вход. - с датчиком линейной скорости.
Источники информации, 1Ц)нШ1тые во внимание 1фн экспертизе
1. Авторское свидетельство СССР № 472833, кл, В 6О Т 8/06, 26.08.75 (прототип). От Hofiando-лппс атаК ufnoanumcMHOfrjfffejre аю/гп9лнои cucffrf/ni
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления автоматическими тормозами подвижного состава | 1977 |
|
SU650860A1 |
| СТЕНД И СПОСОБ ИССЛЕДОВАНИЯ ДВИЖЕНИЯ РОБОКАРА | 2013 |
|
RU2561405C2 |
| Устройство обнаружения буксования и юза колесных пар электроподвижного состава | 1982 |
|
SU1093577A1 |
| Устройство для управления тяговым электроприводом электровоза | 1985 |
|
SU1299850A1 |
| Устройство для управления многодвигательным электроприводом транспортного средства | 1984 |
|
SU1411175A1 |
| Устройство обнаружения юза и боксования | 1981 |
|
SU965820A1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2247961C1 |
| Способ управления торможением транспортного средства и устройство для его осуществления | 2022 |
|
RU2819157C1 |
| УСТРОЙСТВО РЕГИСТРАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ПРИЧИН ДОРОЖНО-ТРАНСПОРТНЫХ ПРОИСШЕСТВИЙ | 2003 |
|
RU2254612C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |