(5) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ФАЗОИМПУЛЬСНЫМИ СИСТЕМАМИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь кода в скорость вращения вала | 1988 |
|
SU1599991A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2422978C1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2485665C1 |
| Стабилизированный электропривод постоянного тока | 1986 |
|
SU1359879A1 |
| Устройство для программного управленияпРиВОдОМ | 1978 |
|
SU798724A1 |
| Устройство для программного управ-лЕНия пРиВОдОМ | 1979 |
|
SU840812A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ С ШАГОВЫМПРИВОДОМ | 1972 |
|
SU336646A1 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| УСТРОЙСТВО для ПРОГРАММНОГО УПРАВЛЕНИЯ ФАЗОВЫМИ И ФАЗО-ИМПУЛЬСНЫМИ СИСТЕМАМИ | 1973 |
|
SU376758A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1341620A1 |
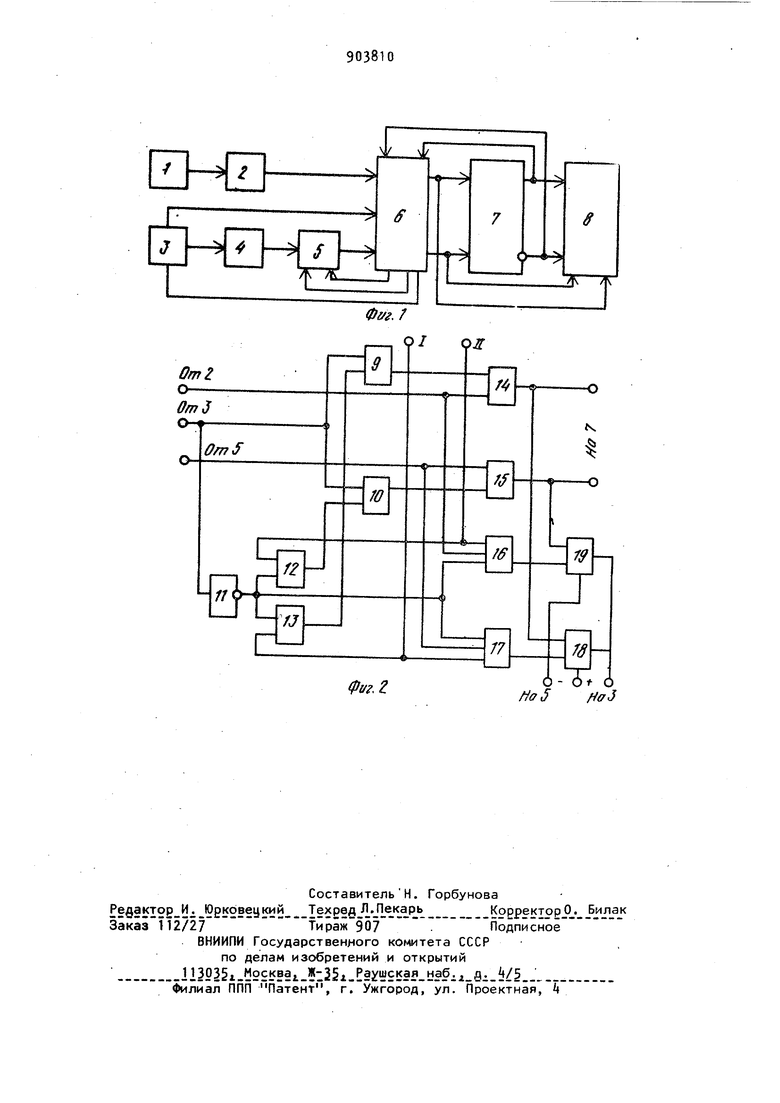
Изобретение относится к автоматике и вычислительной технике и может найти применение в системах числовог программного управления с фазовыми датчиками обратной связи. Известно устройство для программн го управления, Iсодержащее датчикобратной связи и задатчик, соединенные с формирователями импульсов, и фазовый дискриминатор 1. Однако это устройство характеризуется низкой надежностью: как только рассогласование по пути превысит зону фазового дискриминатора, временное чередование импульсов на его входе нарушается и происходит потеря нформации, вызывающая резкие скачки скорости и ошибку в отработке программы. Наиболее близким техническим решением к изобретению является устройство, содержащее датчик обратной рвязи и задатчик, соединенные с формирователями импульсов, а также фаэо выи дискриминатор, входы и выходы которого подключены к первому импуль ному накопителю. Первый импульсный накопитель запоминает рассогласование, кратное фазовому сдвигу, и формирует форсирующий сигнал на выходе устройства для компенсации рассогласования 21 . При разгоне и торможении рабочего органа станка эффективность этого устройства очевидна, так как оно позволяет сократить время пуска и торможения, обеспечивая прямой выход на высокие скорости подами. Но в типовых для систем программного управления режимах контурной обработки и позиционирования расширение диапазона рассогласования по пути сопровождается снижением надежности устройства: здесь случайные скачки скорости и положения нарушают технологический процесс, а форсированное ускорение может привести каварийной ситуации, если лрекращение поступления импульсов с 39 датчика обратной связи вызвано обрывом контура положения или заклинив нием инструмента. Цель изобретения - повышение надежности устройства. Поставленная цель достигается тем что в устройство .для программного уп равления, содержащее дйтчик положения подключенный выходом ко входу первого формирователя импульсов, задатчик положения, соединенный первым выходом со входом второго формирователя импульсов, фазооый дискриминатор, связанный выходами с первыми вхо дами первого импульсного накопителя, .введены сумматор и второй импульсный накопитель, соединенный первым выходом со входом задатчика положения, а вторыми выходами со вторыми входами первого импульсного накопителя и входами фазового дискриминатора, подключенного выходами к первым входам второго импульсного накопителя, связанного вторым, третьим и четвертым входами соответственно с выходом первого формирователя импульсов, со вторым выходом задатчика положения и с выходом сумматора, подключенного первым входом к выходу второго формирователя импульсов, а вторыми входами - к третьим выходам второго импульсного накопителя. На фиг. 1 дана блок-схема устройства; на фиг. 2 - принципиальная схе ма второго импульсного накопителя. Устройство содержит датчик 1 положения, первый формирователь 2 импульсов, задатчик 3 положения, второй формирователь k импульсов, сумматор 5 второй импульсный накопитель 6, фазовый дискриминатор 7, пер вый импульсный накопитель 8. Второй импульсный накопитель содержит элементы ИЛИ 9 и 10, элемент НЕ 11, элементы И 12-17 и два счетчика 18 и 19Устройство работает следующим образом. Предусмот(эено два режима работы: первый - с расширенным диапазоном рассогласования при разгоне и торможении (от первого импульсного накопи теля), и второй - с автоматическим ограничением скачков скорости и поло жения при контурной обработке или по зиционировании (от второго импульсного накопителя). Сигналы с датчика 1 положения (об ратной связи ) через формирователь О .4 импульсов VI сумматор 5 проходят на второй импульсный накопитель 6, который в режимах Разгон и Торможение пропускает их на фазовый дискриминатор 7 в любой последовательности. Для этого на втором выходе задатчика 3 устанавливается постоянный сигнал, который через элементы ИЛИ 9 и 10 поступает на элементы И 14 и 15, разрешая прохождение импульсов задания и отработки на фазовый дискриминатор 7. Временное чередование импульсов в этих режимах оценивается первым импульсным накопителем 8, запоминающим величинуи знак рассогласования занесколько оборотов фазы и формирующим форсирующий сигнал на выходе для устранения рассогласования. Таким образом, система выходит на заданную скорость. В режиме контурной обработки лишние импульсы задерживаются вторым импульсным накопителем 6. Поскольку команды Разгон или Торможение в этом режиме нет, сигнал на втором выходе задатчика 3 отсутствует, и постоянный сигнал с выхода элемента НЕ 11 поступает на элементы И 12-17. При последовательном чередовании импульсов на выходах первого и второго формирователей 2 и Ц импульсов с прямого и инверсного выходов фазового дискриминатора 7 поочередно подается сигнал 1 на элементы И 12 и 13, который затем, проходя через элементы ИЛИ 9 или 10, открывает элементы И lA или 15 для управления фазовым дискриминатором 7Если с формирователя импульсов задания поступает сдвоенный импульс (так .как второй импульс задания приходит раньше, чем будет отработан первый), то с первым импульсом на прямом выходе фазового дискриминатора 7 появится 1. Сигнал 1 откроет элементы И 13 и 17, подготавливая элемент И 1 i к приему импульса обратной связи и пропуская второй импульс задания на первый счетчик 18, так как через элемент И .15 он не проходит. Первый же пришедший затем импульс обратной связи производит считывание содержимого счетчика 18, в результате чего импульс задания, задержанный на входе фазового дискриминатора 7 подается на сумматор 5, где складывается с импульсами программы. Аналогично устройство работает и пои поступлении сдвоенного импульса
по каналу обратной связи. С первым имульсом обратной связи на инверсном выходе фазового дискриминатора 7 устанавливается логический сигнал 1.. Он открывает элементы И 12 и 16, подготавливая элемент И 15 к приему импульса задания и пропуская второй импульс обратной связи на второй счетчик 19, так как через элемент И Н он не проходит. Первый же пришедший затем импульс задания производит считывание содержимого счетчика, в результате чего лишний импульс отработки, задержанный на входе фазового дискриминатора 7, подается на сумматор 5, вычеркивая один из импульсов программы.
Так схема работает до тех пор, пока на втором выходе задатчика 3 положения не появится постоянный сигнал, соответствующий режиму Торможение, который вновь, как и при разгоне,разрешает прохождение всех импульсов задания и отработки на фазовый дискриминатор 7.
Аналогично устройство может работать и в позиционных системах,для чего в режиме быстрых перемещений включается первый импульсный накопитель 8, а в режиме позиционирования второй импульсный накопитель 6.
Предлагаемое устройство предусматривает также защиту системы от аварийных режимов, возникагацих в известном устройстве при обрыве цепи обратной связи или заклинивании инструмента. При этом подача импул-ьсов отработки с первого формирователя 2 импульсов (обратной связи) прекращается .и в счетчике 18 второго импульсного накопителя 6 накапливаются импульсы задания до тех пор, пока си(- нал переполнения .с выхода его не поступит на задатчик 3, останавливая программу.
Технико-экономическии эффект от внедрения устройства заключа.ется в повышении надежности йазоимпульсных
систем (исключения потерь фазы, сбоев и аварийных режимов) в результате организации автоматического перехода с режима форсированного разгона (торможения) на режим ограничения скачков скорости и положения при обработке .
Формула изобретения
Устройство для программного управления фазоимпульсными системами, содержащее датчик положения, подключенный выходом ко входу первого формирователя импульсов, задатчик положения, соединенный первым выходом со вxoдo f второго формирователя импульсов, фазовый дискриминатор, связанный выходами с первыми входами первого импульсного накопителя, отличающее с.я тем, что, с целью повышения надежности устройства, в него введены сумматор и второй импульсный накопитель, соединенный первым выходом со входом задатчика положения, а вторыми выходами со вторыми входами первого импульсного накопителя и входами фазового дискриминатора, подключенного выходами к первым входам второго импульсного накопителя, связанного вторым, третьим и четвертым входами соответственно с выходом первого формирователя импульсов, со вторым выходом Задатчика положения и с выходом сумматора, подключенного первым входом к выходу второго формирователя импульсов, а вторыми входами - к третим выходам второго импульсного накопителя.
Источники информации, принятые во внимание при экспертизе
