(St) ГИДРОКОПИРОВАЛЬНЫЙ СУППОРТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическое копировальное устройство | 1980 |
|
SU897473A1 |
| Гидрокопировальный многопроходной суппорт | 1977 |
|
SU707770A1 |
| Гидрокопировальный многопроходный суппорт | 1982 |
|
SU1050849A1 |
| Гидрокопировальный суппорт | 1980 |
|
SU904997A1 |
| Гидрокопировальный многопроходный суппорт | 1977 |
|
SU680857A1 |
| Гидрокопировальный многопроходный суппорт | 1981 |
|
SU1134350A1 |
| Управляющее устройство для гидрокопироваль-НОгО СуппОРТА | 1979 |
|
SU850353A1 |
| Гидрокопировальный суппорт к резьботокарному станку | 1979 |
|
SU872202A1 |
| Гидрокопировальный суппорт | 1977 |
|
SU691277A1 |
| Копировальный гидросуппорт | 1979 |
|
SU848287A1 |

1
ИГзббретёние относится к станко строению. .
.Известен гидрокопировальный суппорт, выполненный в виде отдельных узлов и содержащий основание с.направ ляющими, салазки, силовой цилиндр и систему управления, включающую следящий золотник и нёзависимые одно от другого командные устройства, кот торые связаны с шаблоном, барабаном упоров, ручкой управления и электромагнитом, имеющими общее конечное звено, установленное на рычаге копировального щупа р
Однако этот суппорт обладает недостаточной жесткостью и при перестановке щупа с одной стороны гидросуппорта на другую приходится переставлять также и золотник и барабан упоров, что не всегда удобно.
Цель изобретения - повышение жесткости -и. расширение технологических возможностей суппорта.
Поставленная цель достигается тем, что рычаг копировального щупа выполнен в виде замкнутой рамки, охватывающей силовой цилиндр и установленной на его оси, при этом на силовом цилиндре.предусмотрены места для крепления, предназначенные для перестановки рамы в плоскости, перпендикулярной оси силового цилиндра.. При этом рамка выполнена с отогну10тыми сторонами.
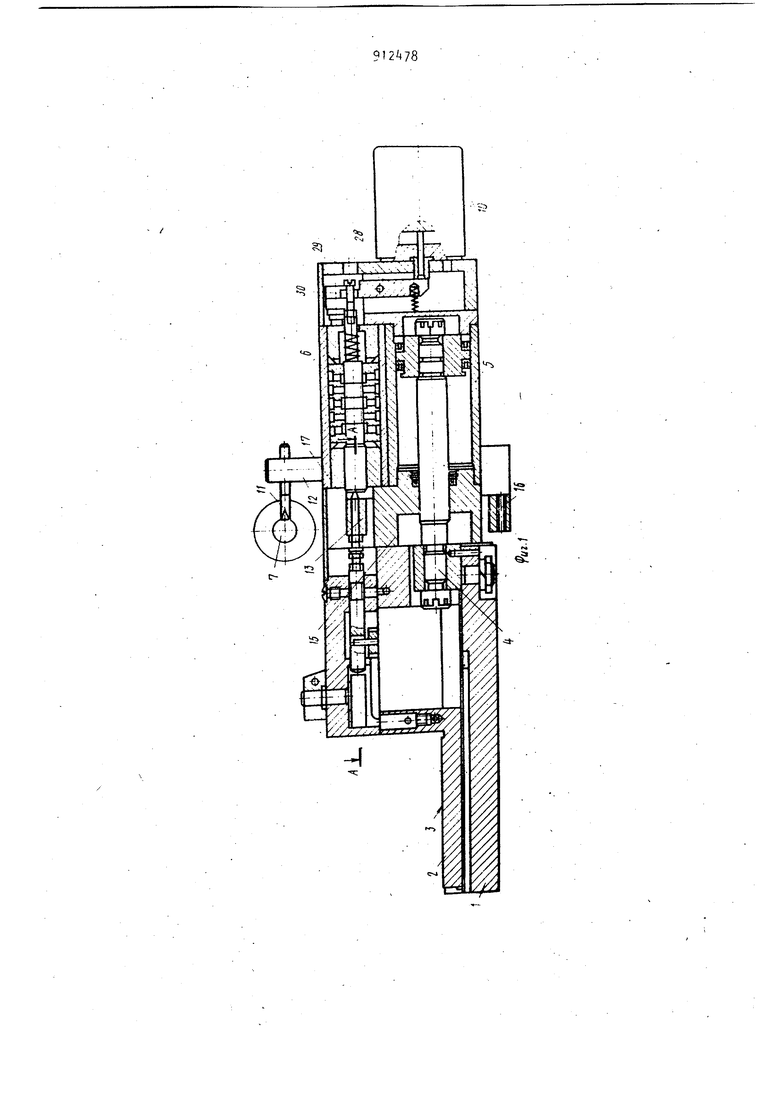
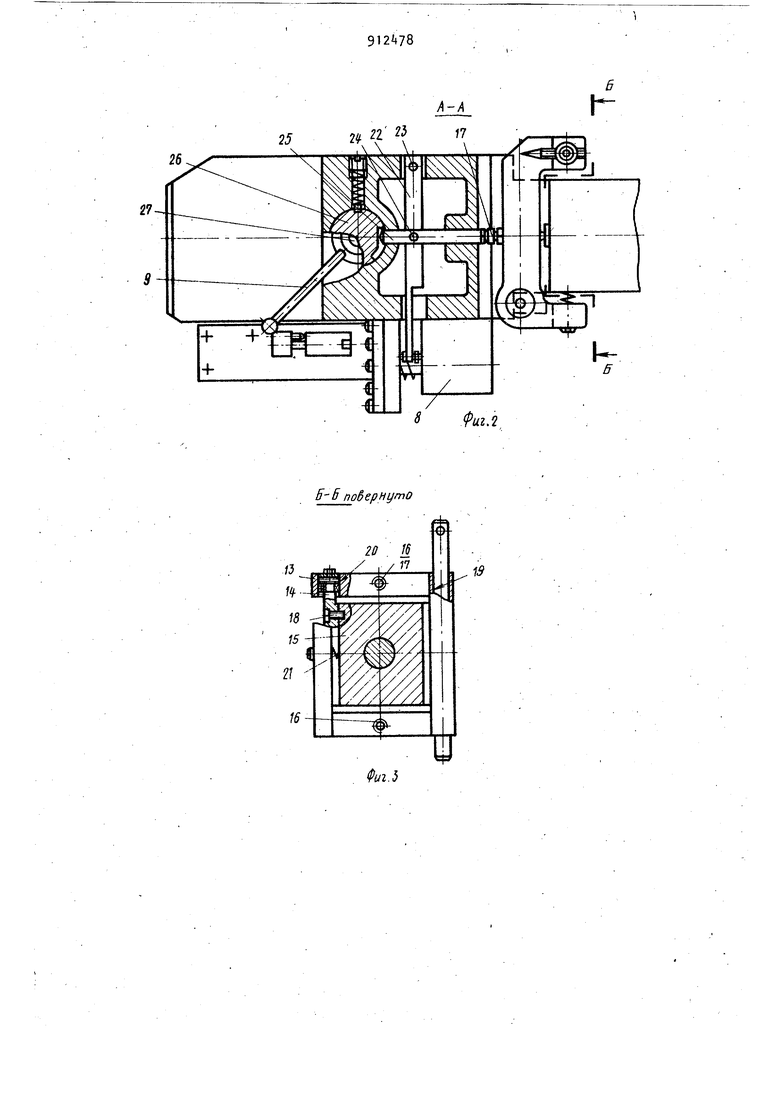
На фиг. 1 представлен суппорт, разрез по оси симметрии; на фиг. 2 разрез А-А на фиг. 1 (ручное управление) ; на фиг. 3 - разрез Б-Б на
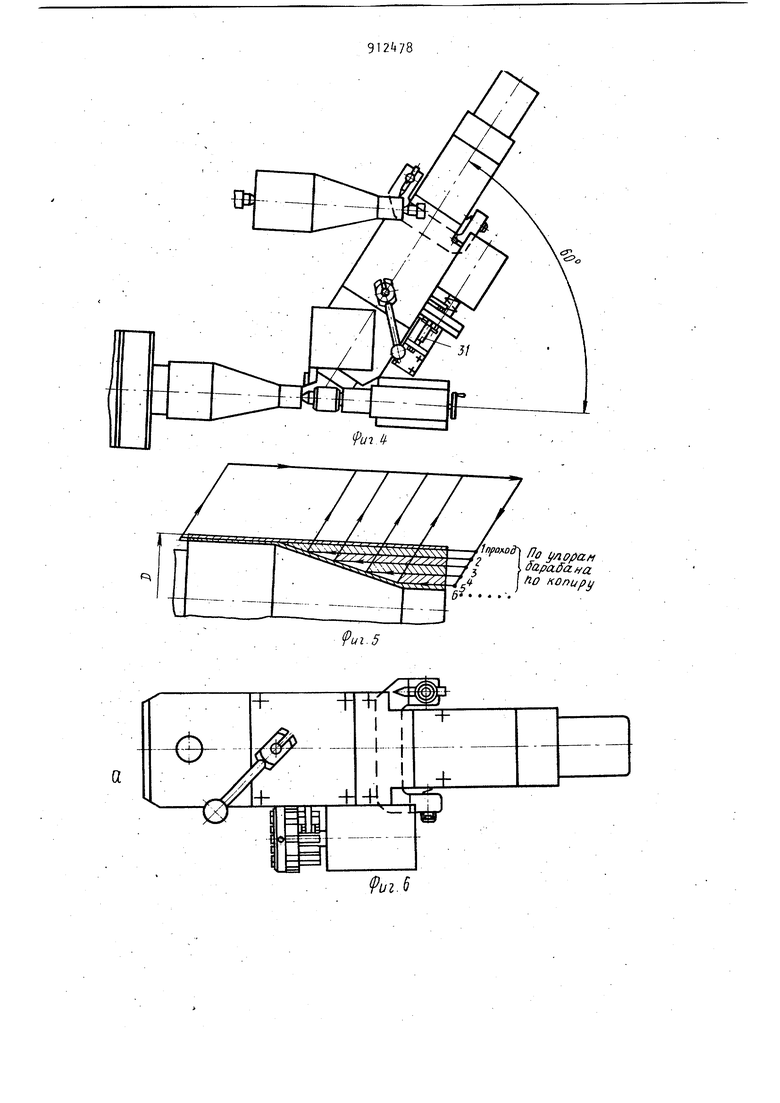
15 фиг. 2 (поперечный разрез гидросуппорта в зоне следящего рычага); на фиг. k - вариант рабочего положения суппорта на станке; на фиг. 5 циклограмма обработки детали; на
20 -фиг. 6-9 варианты компоновки гидро копировального суппорта.
Гидрокопировальный суппорт состоит из основания 1 с направляющими. 3 по которым перемещаются салазки 2,. имеющие место для крепления инструмента 3 (см. фиг. 1). С основанием жестко связан шток поршня k силового цилиндра 5 который скреплен жест ко с салазками. Над силовым цилиндром смонтирован следящий золотник 6 к которому подводится масло (давление и слив). На салазках укреплена система управления следящим золотником, который, в свою очередь, управляет подачей масла в ту или иную полость силового цилиндра посредством каналов В стыке силового цилиндра и корпуса следящего золотника. Ось следящего золотника параллельна оси силового цилиндра и расположена над ней в единой плоскости симметрии всего, суппорта. В систему управления вхрдят четыре независимых друг от друга устройства, которые действуют от шаблона 7, от барабана упоров 8, от ручки 9управления и от электромагнита 10(фиг. 1, 2 и 3). Устройство управления от шаблона 7 состоит из щупа 11, установлен ного на стержне 12, закрепленного н рычаге 13- Рычаг качается на оси 1Ц на подшипниках. Ось 14 непосредственно крепится к фланцу 15 силово го цилиндра 5- Рычаг 13 выполнен -в виде замкнутой рамки, охватывающей силовой цилиндр 5 в плоскости, перпендикулярной оси этого цилиндра Сечение рычага 13 в плоскости, параллельной основанию гидросуппорта П-образное, т.е. у этой замкнутой рамки стенки, которые перпендикуляр ны основанию, отогнуты на 90 к плоскости, перпендикулярной оси силового цилиндра. На раме в неотог нутых сторонах имеются два резьбовых отверстия 16, предназначенных для установки упора 17, который воз действует на следящий золотник 6. В Зависимости от положения шаблона 7 (над суппортом или под суппортом) и удобства обслуживания, ось рамки можно крепить с той или другой стороны силового цилиндра, на фланц 15 которого для этого крепе . ные отверстия 18. В одной из отогнутых сторон рамк 3 имеется отверстие 19 под стержен 12, т.е. имеется возможность щуп 11 располагать в зависимости от положа 84 ния шаблона 7 (над суппортом или под суппортом). В другой отогнутой стороне рамки 13 имеется отверстие 20 под ось 1 качания и отверстие под регулируемую пружину 21, которая постоянно прижимает упор 17 к следящему золотнику 6. Упор 17 выполнен регулируемым по длине и установлен соосно со следящим золотником. Положение упора по отношению к следящему золотнику не меняется, как и соотношение плеч рычага 13 при перестановках рамки HalSO , т.е. независимо от того с какой стороны оси следящего золотника закреплена на фланце 15 силового цилиндра ось 1А рычага 13Устройство, которое действует от барабана упоров 8, состоит из рычага 22, осъ 23 качания которого закреплена.на салазках, состыкованных с силовым цилиндром. На другой конец рычага 22 воздействует подпружиненный диск с, рабочими упо-рами барабана упоров 8. На линии оси следящего золотника 6 на рычаге 122 установлен штифт 24, с зазором :входящий в отверстие толкателя 251 который одним концом контактирует с упором 17) а другим концом может контактировать с кулачком 26. Кулачок 26 вместе с осью 27 и ручкой 9 управления составляют устройство ручного управления. Таким образом, у всех трех устройств конечным элементом, действующим на следящий золотник 6, является упор 17Устройство, действующее от электромагнита 10, состоит из толкателя 28, подпружиненного рычага 29 и винта зи, регулируемого по длине и закрепленного в плунжере следящего золотника 6. Винт 30 является конечным элементом, действующим на золотник От электромагнита. Пока нет сигнала на электромагнит рымаг 29 стоит в нейтральном положении, не касаясь ни золотника, ни винта 30. . .„ U.... На одной прямой линии в единой плоскости симметрии расположены толкатель 25 ручного управления, упор 17 конечный элемент следящего звена копировального устройства, плунжер следящего золотника 6 и винт 30 - конечный элемент управления от электромагнита. Все они упруг-о замкнуты между собой. I идросуппорт работает следующим образом (см. фиг. 4 и 5) Многопроходная обработка изделий с большими припусками на обработку показана на фиг. it. Циклограмма обр ботки -. на фиг. 5- Первые проходы гидросуппорт делает по рабочим упорам барабана упоров, вылет каждого отличается на величину, „определяемую припуском на проход.При последне .приходе суппорт ведет обработку по шаблону. Получив команду Цикл гид росуппорт перемещается вперед, элек тромагнит отключен. Рабочий упор первого п(эохода на барабане упоров натыкается на неподвижнь1й упор 31 планки упоров, установленный на станке. Диск, сжимая пружину, воздействует на рычаг 13 (см. фиг. 3) .и следящий золотник через толкатель 25, упор.17- Следящий золотник, сжи мая свою пусковую пружину,приходит в нейтральное положение - движение вперед гидросуппорта останавливается От команды на станке Продольное перемещение каретки гидросуппорт, двигаясь с кареткой, снимает припуск первого прохода. В конце продольного перемещения дается команда на включение электромагнита. Электро магнит посредством толкателя 28, рычага 29 и винта 30 (фиг. 1) cмeщaet золотник вправо, сжимая его пружину При этом масло поступает в поршневую полость силового цилинд эа - суппорт начинает отходить. В конце продольного хода гиДросуппорта срабатывает поворот барабана упоров и отклю чается электромагнит. Золотник под действием своей пружины устремляется вперед, масло поступает в штоковую полость силового цилиндра - гидросуппорт идет вперед. Своим вторым рабочим упором второй проход натыкается на неподвижный упор. Диск барабана упоров воздействует на рычаг 13 следящий золотник и т.д. - аналогично первому проходу. . Последний проход гидросуппорта осуществляется по шаблону, т.е. позиция последнего прохода барабана упоров без рабочего упора. При перемещении гидросуппорта вперед на изделие рычаг 13 посредством стержня 1 2 и щупа 11 натыкается на шаблон 7- Упор 17 давит на плунжер следящего золотника и приводит его в нейтральное положение - гидро8 6 суппорт останавливается, получает команду на продольное перемещение вместе с кареткой станка. i4yn 11 контактирует с поверхностью шаблона 7 на всем продольном пути гидросуппорта, тем самым давая команду на следящий золотник - происходит обработка по шаблону. В конце продольного хода включается электре)магнит и суппорт отходит в исходное положение, барабан упоров приходит в положение для работы по первому рабочему проходу. Малопроходная (однопроходная) обработка изделий с минимальным припуском на обработку предусматривает обработку по шаблону. В этом случае гидросуппорт не комплектуется узлами г барабан упоров, электромагнит или их командные устройства не участвуют в работе гидросуппорта. Работа гидросуппорта следующая: ручка 9 управления (фиг. 2) подается на себя, плунжер следящего золотника под действием своей пружины смещается из нейтрального положения, гидросуппорт идет вперед на изделие. Пуп М рычага 13, натыкаясь на шаблон 7, посредством упора 17 возвращает плунжер следящего золотника в нейтральное положение. Включается продольное перемещение каретки и гидросуппорта, щуп П находится все . время в контакте с шаблоном 7 - происходит копирование. В конце продольного хода, рукояткой 9 тидросуппорт отводится от изделия, а затем обратным продольным ходом возвращается в исходное положение для обработки следующей детали в один проход . Часть из- возможных комбинаций при верхнем расположении щупа показана для примера на фиг. 6-9Формула изобретения 1. Гидрокопировальный суппорт, выполненный в виде отдельных узлов и содержащий .основание с направляюими, салазки, силовой цилиндр и истему управле ния, включающую слеящий золотник и независимые одно т другого командные устройства, коорые связаны с шаблоном, барабаном поров, ручкой управления и-электроа гнитом, имеющими общее конечное
звено, установленное на рычаге копи ровального щупа,отличаю|ц .и и с я тем, что, с целью повышения жесткости и расширения технологических возможностей, рычаг копировального щупа выполнен в виде замкнутой рамки, охватывающей силовой цилиндр и установленной на его оси, при этом на силовом цилиндре предусмотрены места для крепления.
2 47Q8
предназначенные для перестановки ра мы в плоскости, перпендикулярной оо. силового цилиндра.
Источники информации, принятые во внимание при экспертизе
Б
IA-/(
a
