(54) ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват промышленного робота | 1981 |
|
SU975395A1 |
| Захватное устройство | 1987 |
|
SU1489983A2 |
| Схват | 1979 |
|
SU837922A1 |
| Захват манипулятора | 1988 |
|
SU1794644A1 |
| Многопозиционное захватное устройство | 1981 |
|
SU994254A1 |
| Устройство для захвата и подачи в зону обработки объемного изделия | 1982 |
|
SU1094606A1 |
| Схват /его варианты/ | 1983 |
|
SU1161374A1 |
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
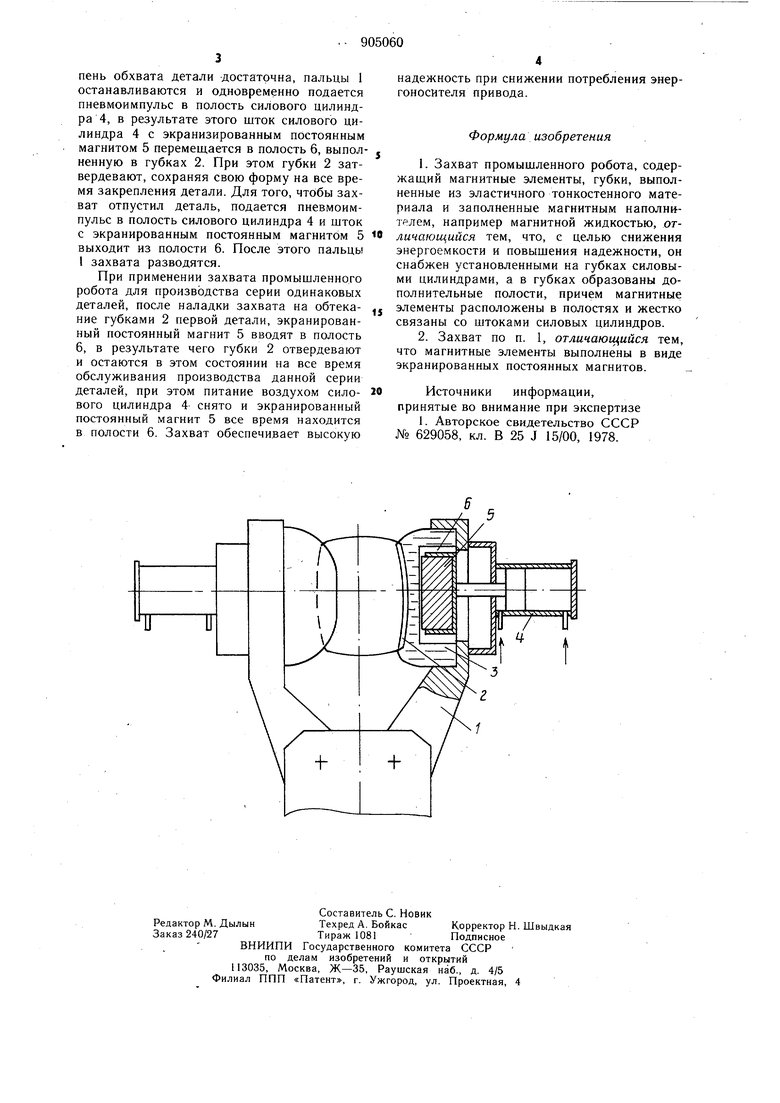
Изобретение относится к машиностроению, а именно к захватам промышленных роботов и манипуляторов для надежного и быстрого закрепления объектов различной формы и массы. Известен захват промышленного робота, содержаший магнитные элементы, губки, выполненные из эластичного тонкостенного материала и заполненные магнитным наполнителем, например магнитной жидкостью 1. Однако известный захват промышленного робота характеризуется повышенной энергоемкостью и недостаточной надежностью. Это объясняется тем, что при удержании детали постоянно включено питание катушек электромагнита, а при аварийном снятии питания катушек электромагнита возможно вы падание детали. Цель изобретения является снижение энергоемкости и повышение надежности захвата промышленного робота. Поставленная цель достигается тем, что захват промышленного робота снабжен установленными на губках силовыми цилиндрами, а в губках образованы дополнительные полости, причем магнитные элементы расположены в полостях и жестко связаны со штоками силовых цилиндров. Магнитные элементы выполнены в виде экранированных постоянных магнитов. На чертеже изображен захват промышленного робота, обший вид. Захват промышленного робота состоит из пальцев 1, закрепленных на каждом пальце губок 2, выполненных из эластичного тонкостенного материала и заполненных магнитной жидкостью 3. На другой стороне пальцев 1 закреплены силовые,цилиндры 4, на штоках которых установлены экранизированные постоянные магниты 5. В губках 2 выполнены полости 6. Захват промышленного робота работает следующим образом. В исходном положении перед взятием детали пальцы 1 разведены, экранированный постоянный магнит 5, установленный на штоке силового цилиндра 4, выведен из полости 6, выполненной в губках 2. Магнитная жидкость 3 в губках 2 находится в свободном состоянии. При закреплении детали пальцы .1 захвата сближаются, губки 2 с магнитной жидкостью 3 обтекают деталь. Когда степень обхвата детали -достаточна, пальцы 1 останавливаются и одновременно подается пневмоимпульс в полость силового цилиндра 4, в результате этого шток силового цилиндра 4 с экранизированным постоянным магнитом 5 перемещается в полость 6, выполненную в губках 2. При этом губки 2 затвердевают, сохраняя свою форму на все время закрепления детали. Для того, чтобы захват отпустил деталь, подается пневмоимпульс в полость силового цилиндра 4 и шток с экранированным постоянным магнитом 5 выходит из полости 6. После этого пальцы I захвата разводятся.
При применении захвата промышленного робота для производства серии одинаковых деталей, после наладки захвата на обтекание губками 2 первой детали, экранированный постоянный магнит 5 вводят в полость 6, в результате чего губки 2 отвердевают и остаются в этом состоянии на все время обслуживания производства данной серии деталей, при этом питание воздухом силового цилиндра 4 снято и экранированный постоянный магнит 5 все время находится в полости 6. Захват обеспечивает высокую
надежность при снижении потребления энергоносителя привода.
Формула изобретения
. Захват промышленного робота, содержащий магнитные элементы, губки, выполненные из эластичного тонкостенного материала и заполненные магнитным наполнителем, например магнитной жидкостью, отличающийся тем, что, с целью снижения энергоемкости и повышения надежности, он снабжен установленными на губках силовыми цилиндрами, а в губках образованы дополнительные полости, причем магнитные
элементы расположены в полостях и жестко связаны со штоками силовых цилиндров.
Источники информации,
принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 629058, кл. В 25 J 15/00, 1978.
