Изобретение относится к вспомогательным устройствам для ориентации деталей и, в частности к устройствам, обеспечивающим ориентацию стержневых и стаканообразных деталей, имеющих большое отношение длины к диаметру.
Известен ротор ориентации штучны деталей, содержащий равномерно расположенные по окружности ротора механизмы вторичной ориентации, выполненные в виде поворотных цилиндров 1.
Недостатком ротора являются его большие габариты при ориентации д линнсмерных деталей, что увеличивает их инерционность.
С целью уменьшения габаритов ротора путем сокращения шагового расстояния между механизмами ориентации при ориентации длинномерных деталей, возвратно-поворотные цилиндры установлены с возможностью ра.диального перемещения и вращения вокруг своей оси в вертикальной плоскости, проходящей через ось вращения ротора.
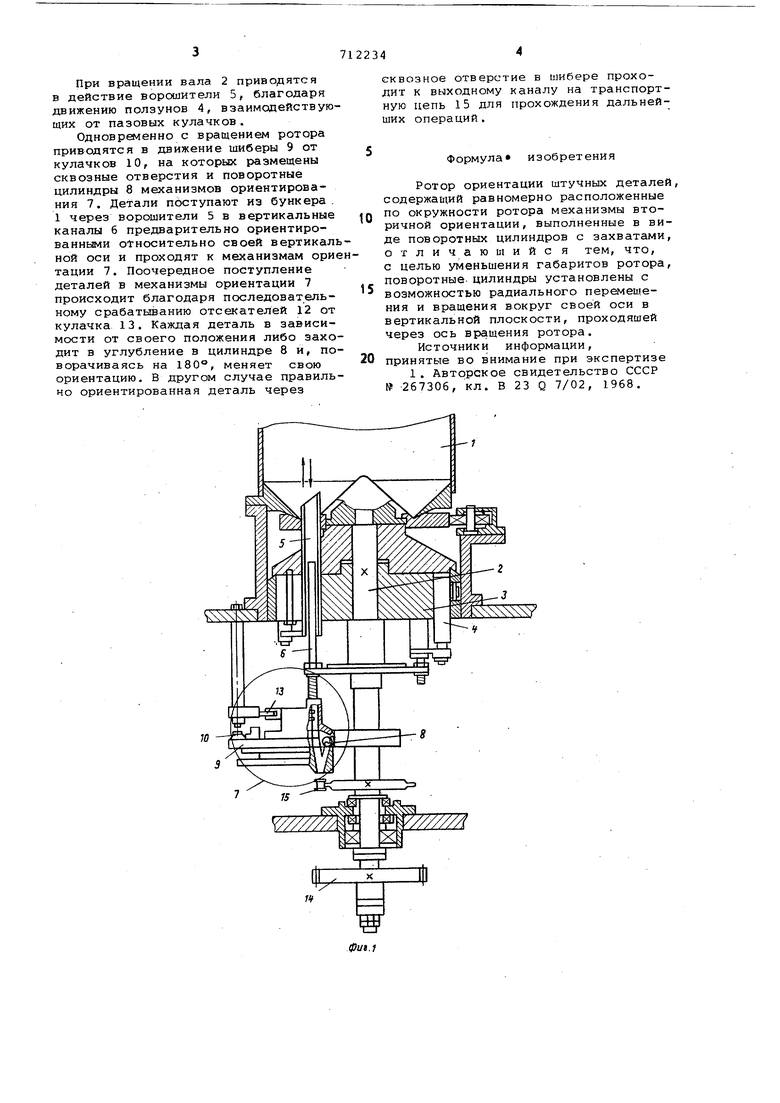
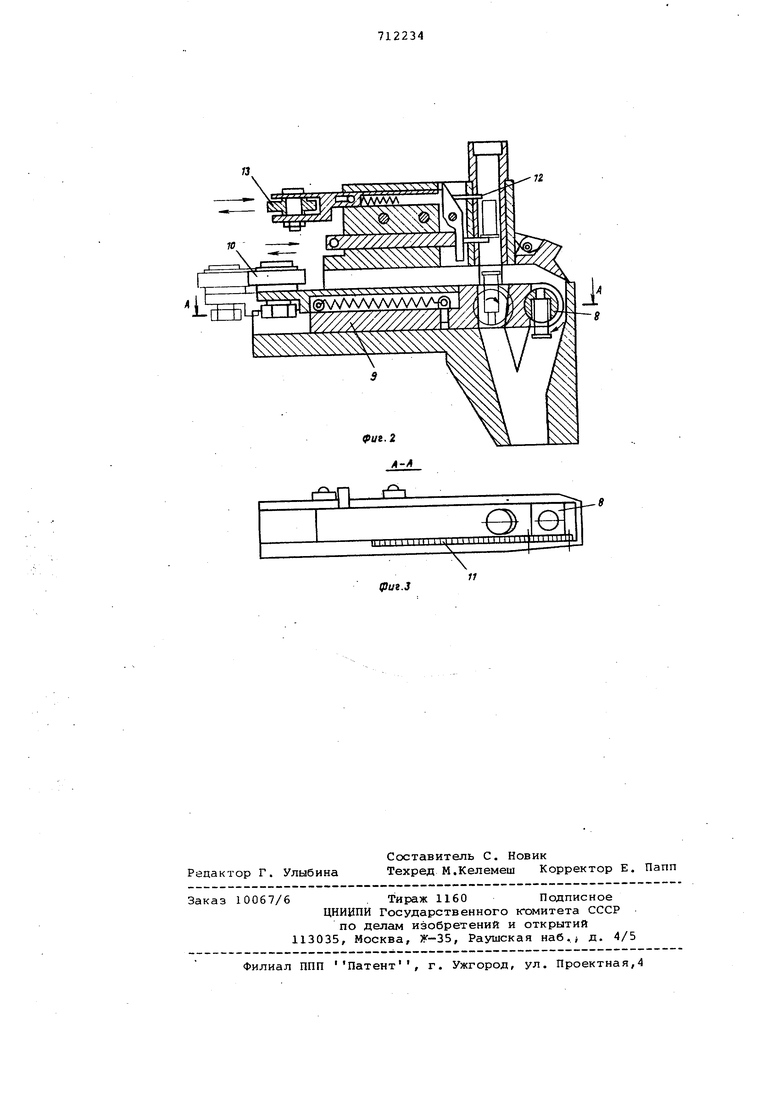
На фиг. 1 показан роторный автомат, продольный разрез; на фиг. 2 -
фрагмент ротора ориентации (механизм ориентации); на фиг. 3 - сечение по А-А на фиг.2.
Ротор ориентации содержит загрузочный бункер 1, вал 2, на которсм жестко закреплен барабан 3, в пазах которого размещены ползуны 4, взаимодействующие с ворошителями 5, устройства для передачи деталей из
0 бункера 1, выполненные в виде вертикального канала 6, механизмы ориентации 7, размещенные равномерно по окружности ротора и выполненные в виде поворотных цилиндров 8,
5 размещенных на шиберах 9 с возможностью радиального перемещения от кулачка 10 и вращения вокруг своей оси в вертикальной плоскости, проходящей через ось вращения ротора
0 за счет неподвижной зубчатой рейки 11, отсекатели 12, взаимодействующие от одного кулачка 13. Вращение ротора осуществляется от зубчатого колеса 14, а детали из механизма
5 ориентирования попадают на транспортную цепь 15 для переноса на последующие операции.
Ротор ориентирования работает следующим образом. При вращении вала 2 приводятся в действие ворошители 5, благодаря движению ползунов 4, взаимодействующих от пазовых кулачков. Одновременно с вращением ротора приводятся в движение шиберы 9 от кулачков 10, на которых размещены сквозные отверстия и поворотные цилиндры 8 механизмов ориентирования 7. Детали пбступают из бункера. 1 через ворошители 5 в вертикальные каналы 6 предварительно ориентированными о носительно своей вертикаль ной оси и проходят к механизмам орие тации 7. Поочередное поступление деталей в механизмы ориентации 7 происходит благодаря последовательному срабатыванию отсекателей 12 от кулачка 13. Каждая деталь в зависимости от своего положения либо захо дит в углубление в цилиндре 8 и, по ворачиваясь на 180°, меняет свою ориентацию. В другом случае правиль но ориентированная деталь через
If
-1 сквозное отверстие в шибере проходит к выходному каналу на транспортную цепь 15 для прохождения дальнейших операций. Формула изобретения Ротор ориентации штучных деталей, содержащий равномерно расположенные по окружности ротора механизмы вторичной ориентации, выполненные в виде поворотных цилиндров с захватами, отличающийся тем, что, с целью уменьшения габаритов ротора, поворотные, цилиндры установлены с возможностью радиального перемещения и вращения вокруг своей оси в вертикальной плоскости, проходящей через ось вращения ротора. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 267306, кл. В 23 Q 7/02, 1968.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ротор ориентации штучных деталей | 1979 |
|
SU874309A2 |
| Ротор ориентации и загрузки штучных заготовок | 1990 |
|
SU1722782A1 |
| Ротор ориентации штучных деталей | 1983 |
|
SU1098752A1 |
| Ротор ориентации штучных деталей | 1979 |
|
SU812519A1 |
| Роторный автомат питания | 1987 |
|
SU1524988A1 |
| Ротор ориентации штучных деталей | 1980 |
|
SU906666A2 |
| Роторный автомат питания | 1986 |
|
SU1419855A1 |
| Загрузочный ротор | 1990 |
|
SU1780988A1 |
| Роторный автомат питания | 1976 |
|
SU564139A1 |
| Роторный автомат питания | 1982 |
|
SU1077756A2 |
11
фиг.З
