1
Изобретение относится к машинестроению, а именно к промьииленным роботам и манипуляторам.
Известен исполнительный орган, манипулятора, содержащий шарнирно соединенные неподвижную и подвижную опоры, плечо, предплечье, кисть и разгрузочные механизмы для плеча и предплечья р .
Недостаток известного исполнительного органа - отсутствие управновешивания захватываемых предметов, что снижает грузоподъемность и производительность манипулятора.
Цель изобретения - повышение грузоподъемности и производительности .
Указанная цель достигается тем, что исполнительный орган манипулятора снабжен блоком настройки разгрузочных механизмов, содержащим узел управления, и установленными на подвижной опоре приводами поступательного перемещения, штоки которых
связаны с осями кулис разгрузочных механизмов и имеют регулируемые упоры.
Узел управления блока настройки содержит двухполостной распределитель с электромагнитом и пневмомагистралью, а приводы поступательного перемещения выполнены в виде двух пневмоцилиндров, полости, которых связаны с выходами распределите10ля, один из входов которого связан с атмосферой, а другой - с пневмомагистралью, причем электромагнит двухполостного распределителя соединен с выходом системы управления.
15
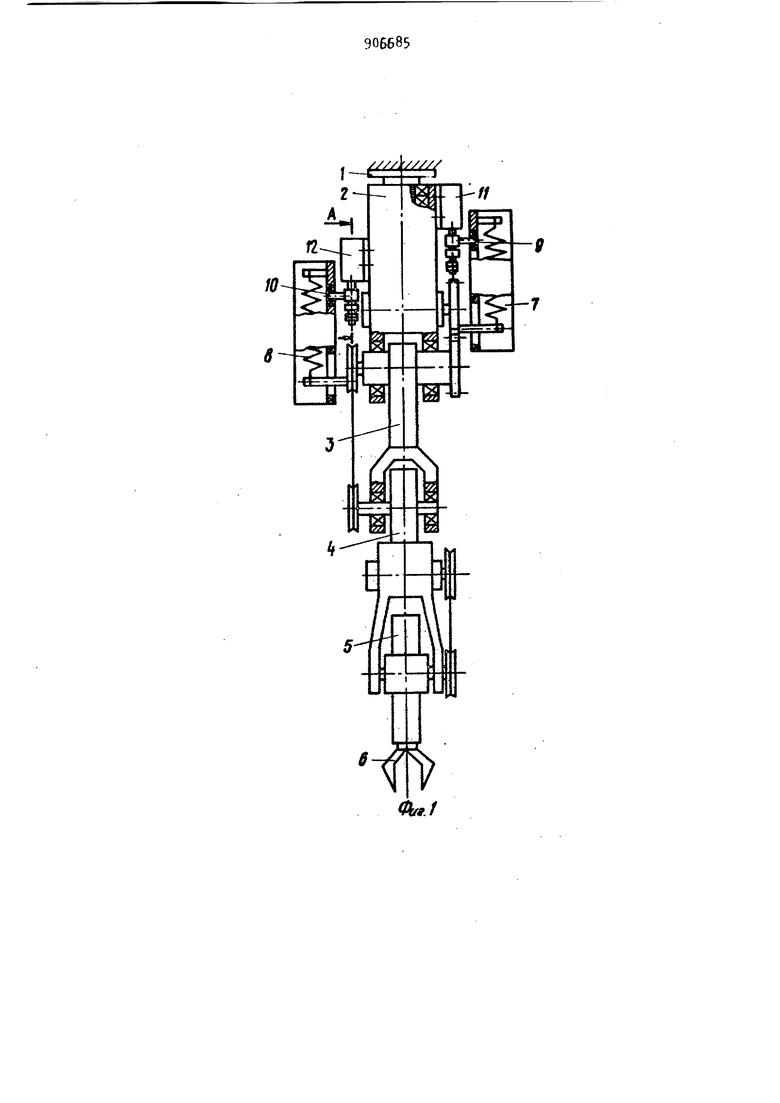
На фиг. 1 изображен исполнительный орган манипулятора, общий вид| на фиг. 2 - разрез А-А на фиг. 1j на фиг. 3 - вид В на фиг. 2, на фиг. k - схема блока настройки раз20грузочных механизмов.
Устройство содержит неподвижную опору 1, подвижную опору 2, плечо 3 предплечье , кисть 5 и захаат 6. Разгрузочные механизмы ггпеча и предплечья содержат соответственно пружины 7 и 8, шарнирно установленные на осях 9 и 10 кулис. Блок настройки разгрузочных механизмов
имеет в качестве приводов поступательного перемещения два пневмоцилиндра П и 12, установленные на подвижной опоре 2, и узел 13 управления. На штоке I пневмоцилиндра 12 установлены каретка 15, на которой закреплена ось Ю кулисы и регулиpyeswe упоры 16 и 17, ограничивающие ход штока I. Каретка 15 связана с установленными на корпусе пневмоцилиндра 12 направляющими 18 и 19, на которых закреплена планка 20. Пневмоцилиндр 11 имеет аналогичную конструкцию. Узел 13 управления снабжен двухполостным распределителем с элек ромагнитом. Причем входы двухполсстного распределителя связаны один с атмосферой, а другой - с пневмомагистралью, а выходы - с пoлocтя 1 пневмоцилиндров 11 и 12, при этом
электромагнит двухполостного распределителя соединен с выходом системы 21 управления.
Устройство работает следующим образом.
При отсутствии предмета в захвате 6, что соответствует отсутствию сигнала с системы управления 21, обмотка электромагнита двухполостного распределителя обесточена и двухполостный распределитель узла управления 13 находится в исходном положении. При этом верхние полости пневмоцилиндров 11 и 12 соединены с пневмомагистралью,. а нижние - с атмосферой, и штоки находятся в крайнем нижнем положении, ограниченном регулируемыми упорами 16, которые выбираются таким образом, что разгрузочные механизмы плеча и предплечья уравновешивают статические нагрузки только от веса конструкции исполнительного органа. При захвате предмета сигнал с системы 21 управления поступает на обмотку электромагнита двухполостного распределителя, и шток двухполостного распределителя узла управления перемещается в крайнее левое положение. При этом происходит переключение полостей пневмоцилиндров 11 и 12 и их штоки перемещаются в крайнее верхне положение, ограниченное регулируемыми упорами 17, увлекая за собсх оси 9 и 10 кулис и вызывая растяжение пружин 7 и 8 разгрузочных устройств .Регулируемые упоры 17 выбираются в зависимости от веса захватываемых предметов, в результате разгрузочные механизмы плеча и предплечья уравновешивают статические нагрузки не только от веса конструкции исполнительного органа, но и от веса предмета. При работе с предметами другого веса упоры 17 настраиваются на вес этих предметов.
Таким образом, установка блока настройки разгрузочных механизмов позволяет увеличить грузоподъемност и производительность исполнительног органа манипулятора за счет уравновшивания статических нагрузок от вес захватываемых предметов.
Формула изобретения
1.Исполнительный орган манипулятора, содержаи1ий шарнирно соединенные неподвижную и подвижную опоры, плечо, предплечье, кисть, захват, связанный с системой управления,
и разгрузочные механизмы для плеча и предплечья, содержащие пружины и шарнирно установленные на осях кулисы, отличающийся тем, что, с целью повышения грузоподъемности и производительности, он снабжен блоком настройки разгрузочных механизмов, содержащим узел управления, и установленными на подвижной опоре приводами поступательного перемещения, штоки котйрых связаны с осями кулис разгрузочных механизмов и имеют регулируемые упоры
2.Исполнит ел орган по п.1, отличающийся тем, что, узел управления блока настройки представляет собой двухполостной распределитель с электромагнитом
и пневмомагистралью, а приводы поступательного перемещения выполнены в виде двух пневмоцилиндров, полости которых связаны с выходами двухполостного распределителя, один из входов которого связан с атмосферой, а другой - с пневмомагистралью, причем электромагнит двухполостного распределителя соединен с выходом системы управления.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР Н 76971, кл. В 25 J 1/02, 1976.
Фиг 2
Видь
fO
-Е
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод исполнительного органа манипулятора | 1980 |
|
SU921846A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |
| Антропоморфный манипулятор | 1989 |
|
SU1646850A1 |
| Исполнительный орган манипулятора | 1975 |
|
SU560746A2 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Исполнительный орган манипулятора | 1975 |
|
SU541662A2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
| Рука манипулятора | 1978 |
|
SU715317A1 |