Изобретение относится к подъемно транспортдому оборудованию, в частности к клещевым захватам для штучных грузов.
Цель изобретения - повышение надежности работы автоматического грузозахватного устройства.
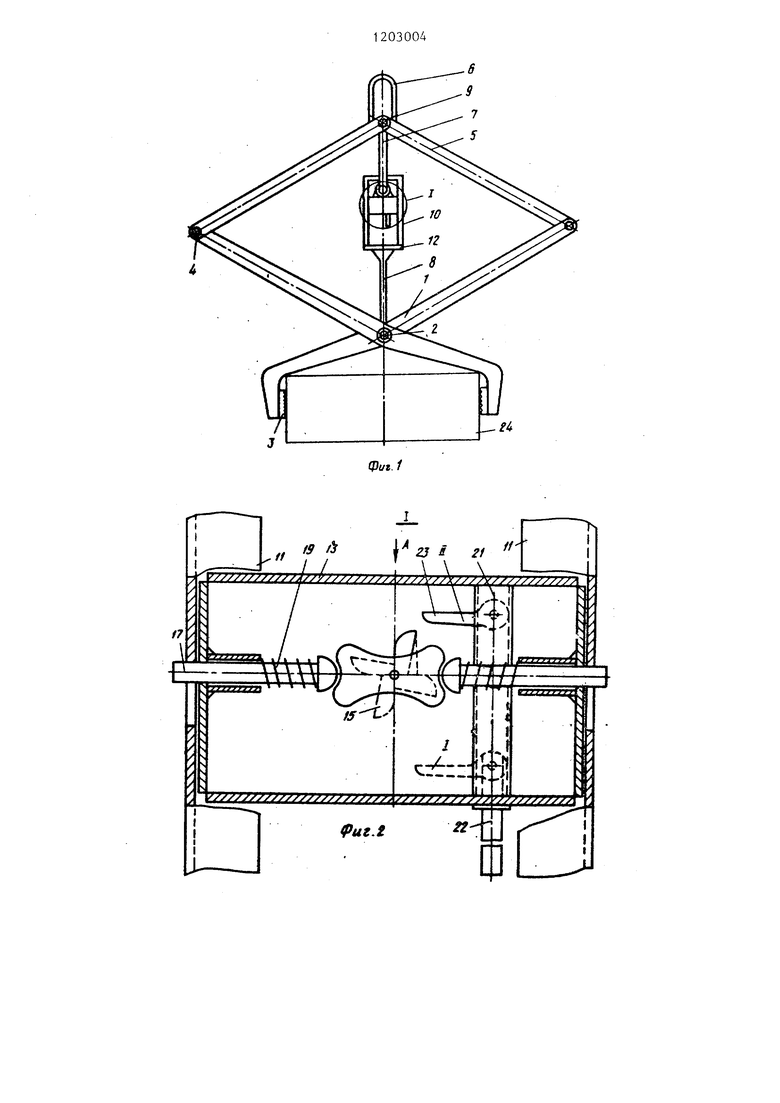
На фиг. 1 изображено автоматическое грузозахватное устройство общий вид; на фиг. 2 узел I на фиг, 1 (устройство со снятой крьпп- кой)5 на фиг. 3 - вид А на фиг. 2.
Автоматическое грузозахватное устройство содержит захватные клещи 1J скрепленные по центру нижним втрниром 2. Одни концы клещей 1 снабжены губками 3, а другие при помощи шарниров 4 соединены тягами 5 с осью серьги 6, навешиваемой на крюк грузоподъемной машины. Вдоль вертикальной оси по центру при помощи рычагов 7 и 8, скрепленных с верхним 9 и нижним 2 шарнирами, закреплен механизм 10 управления работой клещей.
Механизм 10 управления работой клещей 1 состоит из направляющих 115 боковые стенки которых соединены в нижней части опорной планкой 12о Вдоль боковых стенок направляю- П5их 1 1 подвижно установлен корпус 13, В корпусе 13 на шарнирно установленной оси 1Д закреплены крестовина 15 и симметричный двухпро- фштьный кулачок 16. Кулачок 16 взаимодействует с пальцами 17j рас. положенньми внутри втулок 18, за крепленных к корпусу 13, и подпружиненными при помощи пружин 19 один навстречу другому. Свободные концы пальцев 17 расположены в ограничительных пазах 20 направляющи ,11 В корпусе 13 закреплен на противоположных стенках полый цилиндр 21s внутри которого подвижно на оси расположен стержень 22, взаимодействующий опорным концом с опорной планкой 12, На свободном конце стержня 22 установлены упорный зуб 23.
Автоматическое грузозахватное устройство работает следующим об- ,
Перед захватом груза захватные клещи 1 опускаются, и клещевины, касаясь груза 24, приоткрываются. При этом корпус 13 скользит вдоль
направляющих 11 механизма управления работой клещей. Опускание происходит до тех пор, пока стержень 22 не упрется в опорную планку 12. Тогда упорный зуб 23,
поднимаясь вместе со стержнем 22 вверх по полому цилиндру 21, взаимо-- действует с крестовиной 15 и поворачивает ее на 90°. При этом вместе с крестовиной 15 поворачивается и симметричный двухпрофильный кулачок 16, насаженный вместе с крестовиной 15 на ось 14. Кулачок 16 при повороте на 90 взаимодействует с пальцами 17, последние при
помощи пружин 19 выходят из ограничительных пазов 20 направляклдих 1 1 и втулок 18 и освобождаются от зацепления с боковыми стенками направляющих 11. Тогда при подъеме грузозахватного устройства крюком грузоподъейной машины корпус 13, соединенный при помощи рычага 7 с серьгой 6, поднимается вверх, и захватные клещи при помощи губок
3 зажимают груз.
В процессе зажатия и подъема груза упорный зуб 23 занимает положение II (фиг. 2). Но это положение не устойчиво, так как под
действием собственного веса этот упорный зуб 23, скрепленный со стержнем 22, станет опускаться вниз по цилиндру 21. Причем зуб 23 ударившись о крестовину 15, благодаря шарнирному скреплению со
стержнем 22 .повернется ввepx в результате чего он беспрепятственно опустится вниз и займет положение t При опускании груза корпус 13
идет вниз до тех пор, пока стержень 22 вновь не упирается в опорную планку 12J а упорный зуб 23 поворачивает крестовину 15 вместе с симме- тричньт кулачком 16 на 90 . При этом
пальцы 17 расходятся, их торцы входят в ограничительные пазы направляющих 11, Груз при этом освобождается от-зажатия и захватные клещи 1 поднимаются в раскрытом положении.
f4
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватные клещи для штучных грузов | 1957 |
|
SU110904A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО НАВЕШИВАНИЯ ГРУЗА НА ДВУРОГИЙ КРЮК КРАНА | 1990 |
|
RU2034768C1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Строповочный замок | 1980 |
|
SU933603A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
| Контейнер для сыпучих грузов | 1980 |
|
SU982986A1 |

j /jjj/ jji j )4 7 чдгш b лл...., ,., j. 1JL1Л,,,, jiX,.,,, iXff y
fc, f f ff ( Л
7////// i .f у azzz.
фи&.
фи&.
| Грузозахватные клещи для штучных грузов | 1957 |
|
SU110904A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
