Изобретение относится к подъемнотранспортным машинам, а именно к грузовым манипуляторам.
Известен грузовой манипулятор, содержащий корпус с направляющими, стрелу, выполненную в виде пантографа, один из шарниров которого установлен на каретке с возможностью перемещения в напра вляющих корпуса, механизм подъема груза, включающий привод, соединенный с кареткой посредством цепи, и устройство для изменения скорости 1.
Недостаток известного устройства заключается в том, что для изменения скорости подъема груза необходимо применять специальный электрический привод со сложной схемой, тиристорного управления.
Цель изобретения - упрощение конструкции манипулятора.
Указанная цель достигается тем, что механизм подъема груза снабжен Ьбдвижной обоймой блоков, смонтированной на каретке, и неподвижной обоймой, закрепленной в корпусе манипулятора, а цепь запасована на блоки каретки и корпуса с образованием полиспаста, при этом устройство для изменения скорости содержит установленные в корпусе манипулятора фиксаторы с выступами, взаимсЗдействующими со звеньями цепи.
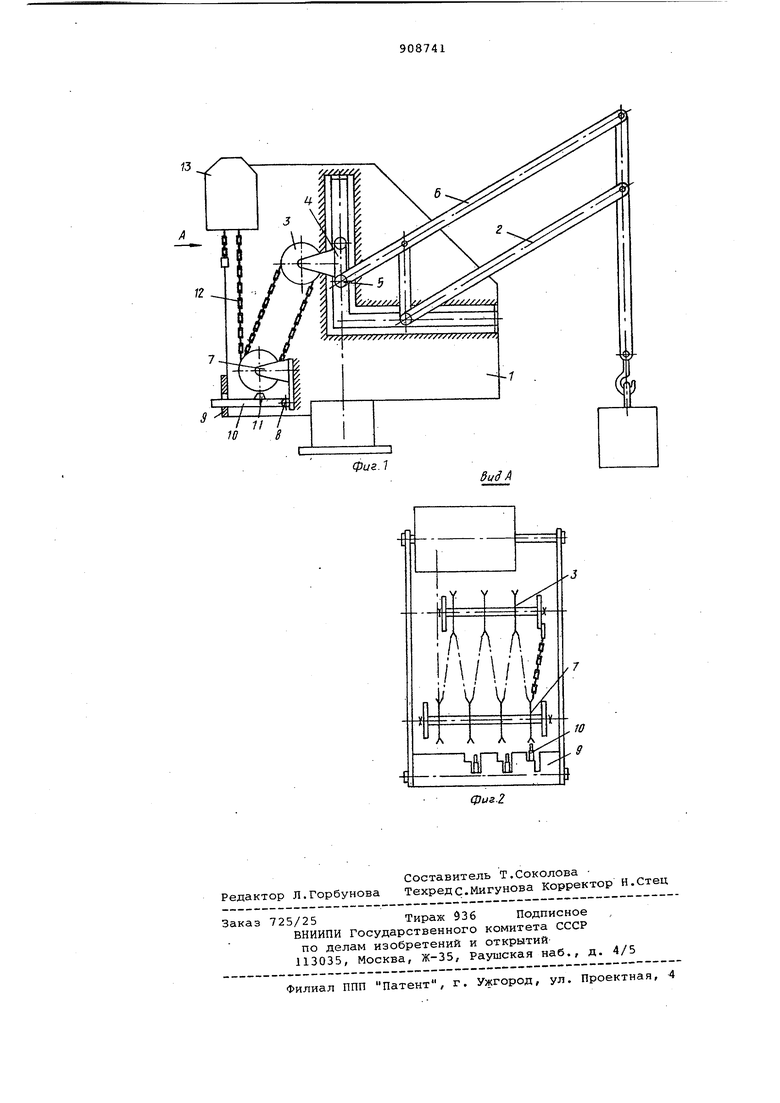
На фиг. 1 схематически изображен грузовой манипулятор, общий вид; на фиг. 2 - вид А на фиг. 1.
Грузовой манипулятор состоит из корпуса 1, стрелы 2, выполненной в виде пантографа, подвижной обоймы 3 блоков, размеженной на каретке 4, к которой посредством шарнира 5 прикреплен рычаг 6 пантографа, неподвижной обоймы 7 блоков, установленной на корпусе 1 манипулятора. Под блоками неподвижной обоймы 7 на оси 8 установлена фигурная планка 9 с фиксаторами 10 устройства для изменения скорости механизма подъема груза;. Фиксаторы 10 снабжены выступами 11, входящими в зацепление со звеньями цепи 12, соединяющей привод-цепную электроталь 13 с кареткой 4, Цепь 12 запасована в полиспаст на обоймы 3 и 7 блоков, причем конец ее закреплен на блоке 3 обоймы,.
Манипулятор работает следующим
образом.
При включении цепной электротали 13 на подъем груза цепь 12 выбирается и тем самым уменьшается расстояние между неподвижными 7 и подвижны ми 3 обоймами блоков. Каретка 4 перемещается вниз вмес с закрепленным на ней посредством шарнира 5 рычагом б стрелы 2, который при этом поднимает груз. Аналогично происходит и опускание груза, когда электроталь 13 травит цепь 12 вследствие чего расстояние между блоками обойм 3 и 7 увеличивается. Каретка 4 поднимается вверх вместе с рычагом 6 стрелы 2. Скорость подъема груза определяе ся скоростью перемещения каретки в направляющей корпуса, которая, в св очередь,зависит от кратности полиспаста цепи 12, определяемой количест вом включенных в работу блоков обойм 3 и 7, Самая медленная скорость в том случае, если в работе находятся все блоки. Для увеличения скорости перемещен груза перед работой в самом верхнем положении каретки 4 с подвижной обоймой 3 в зацепление со звеньями цепи 12, огибающей блоки неподвижной обоймы 7, вводится выступ 11 одного из фиксаторов 10, закрепляемый в определенном положении с помощью,например, вырезов в планке 9. При этом из работы системы исключаются все блоки которые огибают участок цепи после фиксатора 10,уменьшается кратность полиспаста, а скорость подъема и опускания груза, соответственно, увеличивается, становясь максимальной в том случае, когда в работу включен только один блок неподвижной обоймы 7. Лри этом скорость перемещения каретки 4 становится равной скорости перемещения цепи 12. Переход на другую скорость или включение устройства для изменения скорости производится также при крайнем положении каретки 4, что соответствует крайнему нижнему положению груза. При работе с фиксаторами 10 нижние петли неработающего участка цепи 12 опускаются в специальные цепесборники (не показаны). Технико-экономическая эффективность предлагаемого грузового манипулятора по сравнению с известными устройствами заключается в его экономичности, являющейся следствием упрощения его конструкции. Формула изобретения Грузовой манипулятор, содержащий корпус с направляющими, стрелу, выполненную в виде пантографа, один из шарниров которого установлен на каретке с возможностью перемещения в направляющих корпуса, механизм подъема груза, включающий привод, соединенный с кареткой посредством цепи, и устройство для изменения скорости, отличающийся тем, что, с целью упрощения его конструкции, механизм подъема груза снабжен подвижной обоймой блоков, смонтированной на каретке, и неподвижной обоймой, закрепленной в корпусе манипулятора, а цепь запасована на блоки каретки и корпуса с образованием полиспаста, при этом устройство для изменения скорости содержит установленные в корпусе манипулятора фиксаторы с выступами, взаимодействующими со звеньями цепи, Источники информации, принятые во внимание при экспертизе. 1. Авторское свидетельство СССР № 685614, кл. В 66 С 23/14, 1978 (прототип),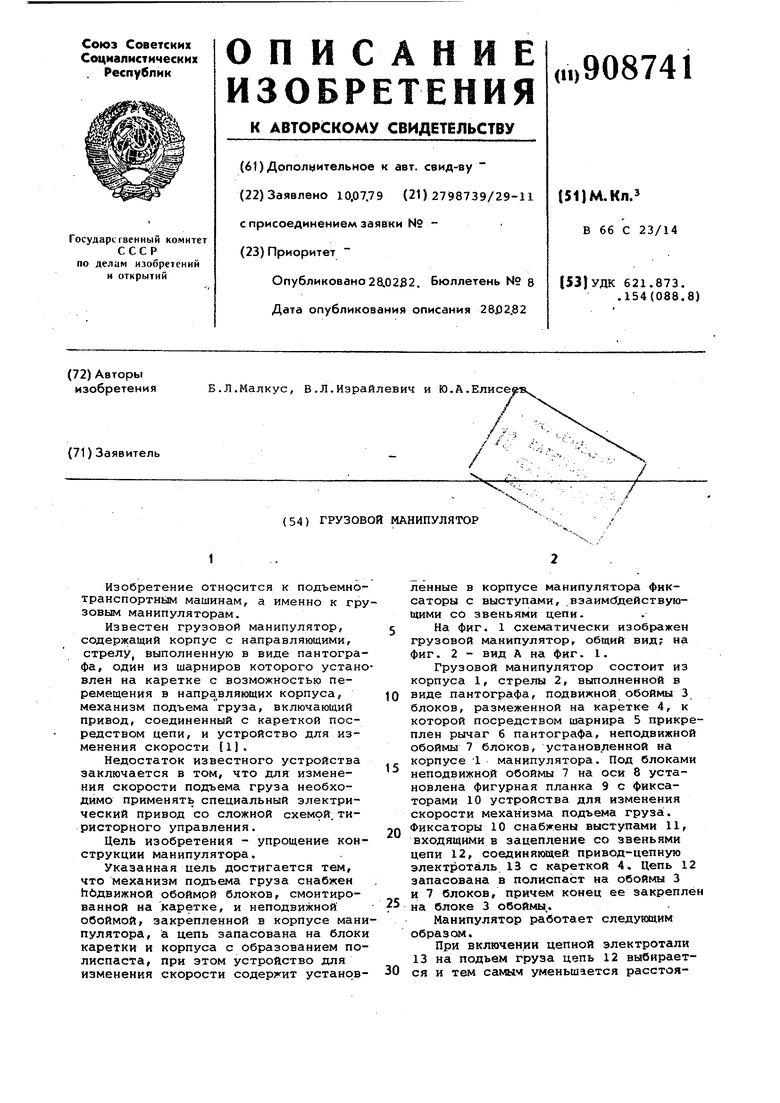
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УРАВНОВЕШИВАНИЯ СТРЕЛОВЫХ КРАНОВ | 1973 |
|
SU385889A1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1972 |
|
SU434055A1 |
| Манипулятор | 1978 |
|
SU685614A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА (ВАРИАНТЫ) | 2001 |
|
RU2195424C2 |
| БАШЕННЫЙ КРАН | 1966 |
|
SU179445A1 |
| Манипулятор | 1980 |
|
SU935450A2 |
| БАШЕННЫЙ КРАН | 2003 |
|
RU2254285C2 |
| АВТОПОГРУЗЧИК | 1969 |
|
SU254379A1 |
| МЕХАНИЗМ ПОДЪЕМА ПЛАВУЧЕГО КРАНА | 1992 |
|
RU2041154C1 |
| БАШЕННЫЙ КРАН | 2003 |
|
RU2249559C1 |