(54) ПНЕВМАТИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический усилитель гидропривода управления сцеплением транспортного средства | 1990 |
|
SU1785924A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ПРИСУЧКИ ПРЯЖИ НА ПРЯДИЛЬНОЙ МАШИНЕ | 1970 |
|
SU280280A1 |
| Устройство для впрыска топлива в двигатель внутреннего сгорания | 1970 |
|
SU491239A3 |
| Устройство для кинематического дробления стружки | 1977 |
|
SU683856A1 |
| Вальцешлифовальный станок для обработки валков в собственных подшипниках | 1975 |
|
SU556029A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Замедлитель железнодорожного транспортного средства | 1983 |
|
SU1183415A1 |
| Питающая часть пневматической системы транспортного средства | 1982 |
|
SU1115948A1 |
| Пневматический тормозной привод прицепных колесных транспортных средств | 1982 |
|
SU1142330A1 |
| Регулятор давления в пневматическом тормозном приводе транспортного средства | 1983 |
|
SU1122530A1 |
1
Изобретение относится к машиностроению и .может быть использовано для точного нагружения элементов конструкции при прочностных испытаниях, а также для привода различных механизмов.
Известен пневматический следящий привод, содержащий корпус, в котором установлены пневматическая камера с мембраной, размещенной в камере с образованием управляющей полости, подключенной к источнику управления, и рабочей полости, под: ключенной через распределительный элемент к напорной Магистрали, и пневмоцилйндр одностороннего действия с поршнем и штоком, связанный с исполнительным элементом ( 1 .V
Недостатками устройства являются недостаточная точность и надежность устройства вследствие трения порщня о цилиндр и утечек воздуха.
Цель изобретения - повышение точности и надежности.
Указанная цель достигается тем, что корпус снабжен направляющими поверхностями, в которых размещен пневмоцилйндр, установленный с возможностью поступательного движения в направлении перемещения
мембраны и жестко связанный с последней, при этом пневмоцилйндр связан с распределительным элементом.
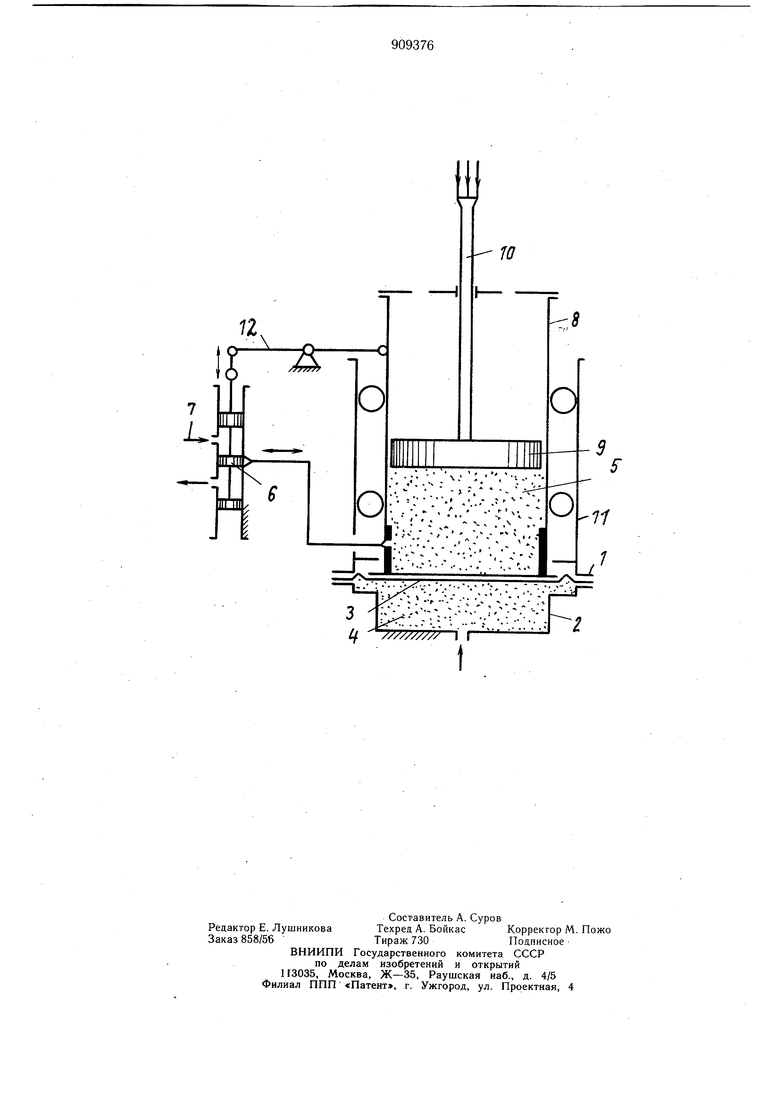
На чертеже схематично показан пневматический следящий привод.
5Пневматический следящий привод содержащий корпус 1, в котором установлены, пневматическая камера 2 с мембраной 3, размещенной в камере 2 с образованием управляющей полости 4, подключенной к источнику управления (на чертеже не показан), и рабочей полости 5, подключенной через распределительный элемент 6 к напорной магистрали 7, и пневмоцилйндр 8 одностороннего действия с порщнем 9 и- щтоком 10, связанный с исполнительным элементом (на.
15 чертеже не показан). Корпус 1 снабжен направляющими поверхностями 11, в которых размещен пневмоцилйндр 8 f возможностью поступательного движения в направлении перемещения мембраны 3 и жестко с ней связанный. Пневмоцилйндр 8 связан с распределительным элементом 6 через цепь обратной связи 12.
Пневматический следящий
привод работает следующим образом.
При подаче управляющего сигнала определенного давления в полость 4 кор;туса 1 происходит перемещение мембраны 3 и пневмоцилиндра 8 вдоль направляющих поверхностей 11 в крайнее верхнее положение, в результате этого срабатывает цепь обратной связи 12 и воздух начинает поступать в рабочую полость 5 пневмоцилиндра 8. Порщень
9двигается вверх, пока нет нагрузки на щтоке 10. При появлении нагрузки (щток
10упирается в поверхность нагружаемой конструкции) давление в рабочей полости 5 пневмоцилиндра 8 возрастает, в результате чего пневмоцилиндр 8 вместе с мембраной 3 перемещается вниз, срабатывает цепь 12 обратной связи и доступ воздуха в рабочую полость 5 пневмоцилиндра 8 прекращается. Мембрана 3 в этом случае занимает нейтральное положение, при котором усилие, действующее на нее снизу от давления управляющей полости 4 корпуса 1. уравновещено усилием, действующим на нее сверху .от давлен я в рабочей полости 5 пневмоцилиндра 8.
При отклонении нагрузки в большую сторону порщень 9 переместится вниз, увеличится давление воздуха под ним, равновесие мембраны 3 нарущается и она движется вниз под действием разности усилий на ее поверхностях, срабатывает цепь 12 обратной связи в результате чего происходит выход части воздуха из рабочей полости 5 пневмоцилиндра 8 в атмосферу до тех пор, пока не установится нейтральное положение мембраны 3, при котором выход воздуха прекращается.
При отклонении нагрузки в меньщую сторону порщень 9 перемещается вверх, уменьщается давление воздуха под ним, равновесие мембраны 3 нарущается и она движется вверх под действием разности усилий на ее поверхностях, срабатывает цепь 12 обратной связи, в результате чего происходит наддув рабочей полости 5 пневмоцилиндра 8 до тех пор, пока не установится нейтральное положение мембраны 3, при котором прекращается наддув.
Предложенное устройство позволит повысить точность воспроизведения заданных нагрузок, так как нагрузка на щтоке 10 зависит только от давления в полости корпуса (ее объем в состоянии равновесия неизменен и не зависит от трения порщня о цилиндр.
Повыщается также надежность работы
силовозбудителя, так как утечки воздуха из
подпорщневой полости рабочего цилиндра
всегда будут компенсироваться ее наддувом
благодаря подвижному рабочему цилиндру.
Формула изобретения
Пневматический следящий привод, содержащий корпус, в котором установлены пневматическая камера с мембраной, размещенной в камере с образованием управляющей полости, подключенной к источнику управления, и рабочей полости, подключенной через распределительный элемент к напорной магистрали, и пневмоцилиндр одностороннего действия с порщнем и щтоком, связанный с исполнительным элементом, отличающийся тем, что, С целью повыщения точности и надежности, корпус снабжен направляющими поверхностями, в которых размещен пневмоцилиндр, установленный с возможностью поступательного движения в направлении перемещения мембраны и жестко связанный с последней, при этом пневмоцилиндр связан с распределительным элементом.
Источники информации,
принятые во внимание при экспертизе 1. Заявка Англии № 1380913, кл. G 3 Н,
опублик. 1975.
8
-..--:-: о
.М
n ,1
, :::. . ...
ц ////////// I s
I
