Изобретениэ относится к машиностроению и может быть использовано в промышленных роботах при обработке и сборке деталей. Известен sax&ett, ссэде га акй гидроцилиндр и две ПРНЭМЫ, причем каждая призма .нен« в в$1де по яуйри м, одна и-з коФафшс уофвй йвяв на с возможностью регул1Ч8гава«йя ее положения относительно другой. Таной захват может быть использовав при работе с деталями различных тип размеров 1. Однако технологические возможности этого захвата ограничены ввиду смещения осей захаатжюаёкюх де- талей различных типоразмеров. По основному авт. св. 724337 известен захват манипулятора, содер жащий сочлененные с ладонью и связа ные с приводом пальцы, собранные из звеньев с фасонньши поверхностями, установленными на пружинящем элемен те 2. ; : -: : Недостатком изврстного технического решения яв ется огравиченност его технологических возможностей постоянством размеров призмы и паль цев захвата, что не позволяет переносить детали разных размеров. Цель изобретения - расширение, технологических возможностей захват Поставленная цель достигается те что в захвате манипулятора ладонь образована полупризмами, перемеща ющимися 8 плоскости перпендикулярн оси руки, причем в каждой полупризме выполнена полость под звеньяпал цев и стягивающий трос. На чертеже изображено предлагаемое устройство. Захват содержит ладонь, образуемую из полупризм 1 и 2, установленных на направляющих 3, имеющих возможность перемещаться в противополо ных направлениях в плоскости, перпендикулярной оси руки 4. Захват содержят: также пальцы, собранные из зве-.. ньев 5, установленных на пружинящем элементе б, с фасонными поверхностями. 7 и 8, по которым звенья 5 контактируют и перекатываются друг относитель«о. захвате детали 9. Через отверстия 10 звеньев 5 каждого пальца пропущен трос 11, один конец которого имеет упор 12, а другой конец, связан с приводом 13. В каждой полупризме 1, 2 выполнены полости 14 ДЛЯ нескольких звеньев 5 и трбоа, а в каждой полости 14 имеются выемки 15. Для фиксации основания пальца полупризмы 1 и 2 сна бжены элементами 16. Перемещение полупризм 1 и 2 осуществляется устройством в виде клиньев 17 и 18, взаимодействующих с приводом 19. Пружина 20 поддерживает полупризмы 1 и 2,.постоянно в контакте с клиньями 17 и 18. Перед работой захват настраивают на заданный диапазон размеров деталей, для чего устанавливают расчетное расстояние между полупризмами, а также длину пальца (количёЪтво звеньев).. Захват работает следушщм образом. В исходном положении пружинящие элементы 6 со звеньями 5 выпрямлены. Захват подается к зоне расположения захватываемой детали 9, после чего включается привод 13 при этом звенья 5 каждого пальца перекатываются друг относительно друга и прижимаю деталь 9 к полупризмам 1 и 2. ; После создания необходимого усилия захвата привод 13 выключается. Деталь 9 подается на рабочую позицию (обработки или сборки/, а затем захват возвращается в исходное положение. Далее цикл повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1981 |
|
SU992181A2 |
| Захват манипулятора | 1982 |
|
SU1066800A2 |
| Захват манипулятора | 1986 |
|
SU1414634A1 |
| Захват манипулятора | 1985 |
|
SU1288057A1 |
| Захват манипулятора | 1980 |
|
SU931465A2 |
| Захват манипулятора | 1985 |
|
SU1328192A1 |
| Манипулятор | 1988 |
|
SU1537510A1 |
| Захват манипулятора | 1978 |
|
SU724337A1 |
| Захват манипулятора | 1983 |
|
SU1133086A2 |
| Устройство для захвата | 1974 |
|
SU743678A1 |
ЗАХВАТ МАНИЦУЛЯТОРА по авт. св. 724337, о тл и ч а ю щ и и с я тем, что, с целью расширения технологических возможностей, ладонь образована полуприэмами, перемещающимися в плоскости, перпендикулярной оси руки, причем в каждой полупризме вьтолнена полость под звенья пальцев и стягиаакхоий трос. (Л с о со 00 со ч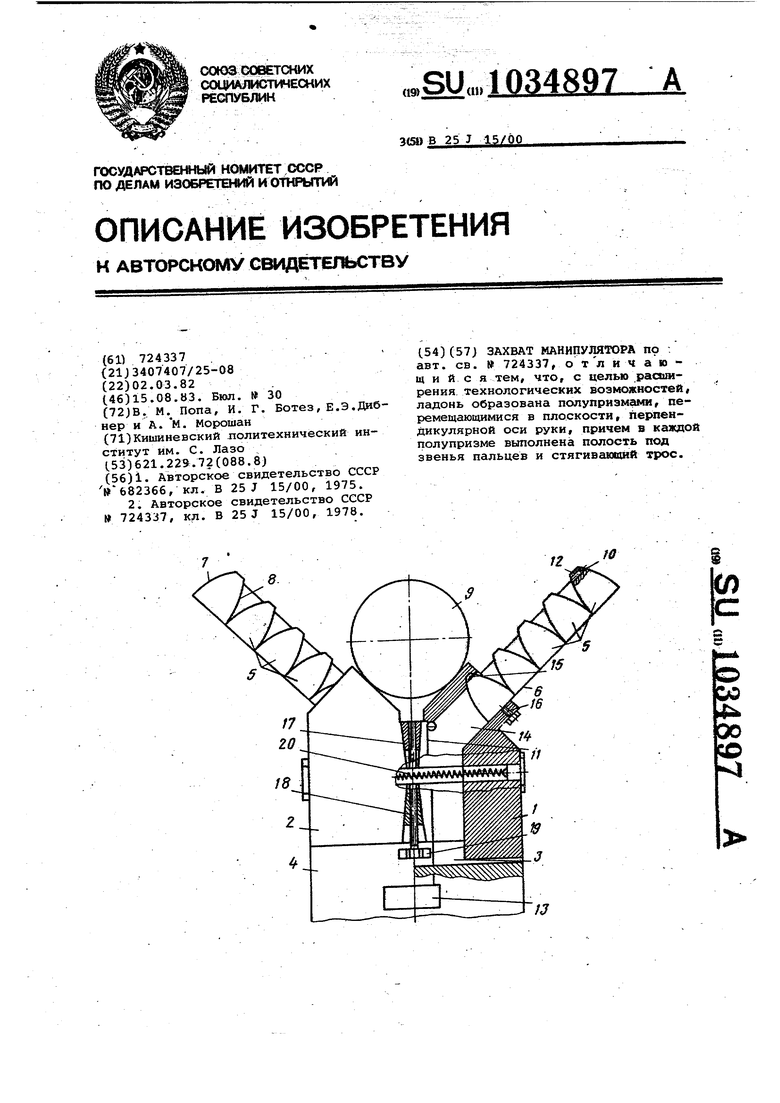
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват | 1975 |
|
SU682366A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Захват манипулятора | 1978 |
|
SU724337A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
