Изобретение относится к робототехнике и может быть использовано в промышленных роботах и манипуляторах при выполнении ими различных технологических операций.
По основному авт. св. № 931465 известен захват, содержащий сочлененные с ладонью и связанные с приводом пальцы, собранные из звеньев причем он снабжен тросом и пружи;НЯ1цим элементом, звенья пальцев выполнены с фасонными поверхностями и установлены на пружинящем элементе с возможностью перемещения вдоль него, при этом каждое звеИо пальца выполнено с выступом и впадиной, расположенными на противоположных фасонных поверхностях звена по продольной оси симметрии последнего, причем выступ каждого звена пальца установлен во впадине соседнего звена, а трос соединяет пальцы с приводом и проходит через Отверстия в звеньях tl3. : Недостатк м известного захвата является то, что он не может быть йспо тьзован в тех случаях, когда необходимо переносить хрупкие детали и когда захватной детали необходимо сообщить вращательное или осевое перемещение. Указанные недостатки снижают технологическ;: возможности захвата.
Цель изобретения - расширение технологических возможностей захваца и повьЕиение надежности. Поставленная цель достигается Тем, что захват снабжен упругими планками и роликами, шарнирно установленными на звеньях пальцев, при этом в ладони выполнены пазы под упругие планки, а последние расположены с возможностью взаимодействия с внутренними торцовыми поверхностями звеньев пальцев, кроме того, трос охватывает ролики и посредством дополнительной пружины п|рикреплен к боковой поверхности ладони.
На последнем звене пальцев установлены по два ролика.
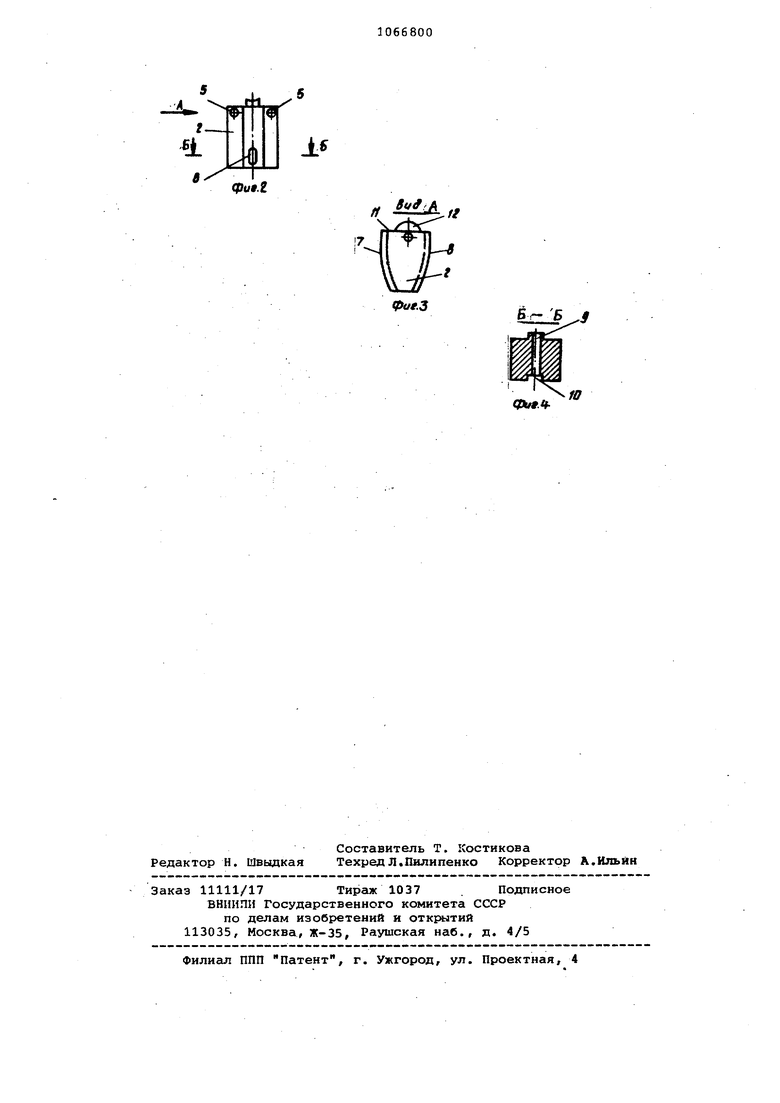
На фиг. 1 показан захват манипулйтора, общий вид, на фиг. 2 отдельное звено пальца, на фиг. 3 вид Л на фиг. 2, на фиг. 4 разрез на фиг. 2.
Захват содержит ладонь 1, пальцы, собранные из, звеньев 2, трос
3, связанный с приводом 4. Каждое звено 2 имеет направляющие 5, отверстие 6 и противоположно расположенные фасонные поверхности 7 и 8, вдоль которых соответственно выполнены выступ 9 и впадина 10. На внешней торцовой поверхности 11 звеньев 2 шарнирно установлены ролики 12. На последнем звене 2 пальца установлены два таких ролика 12. При составлении каждого пальца звенья 2устанавливаются по своим направляющим 5 на пружинящие элементы 13. При этом выступ 9 звена 2 входит во впадину Ю соседнего звена. Трос 3 связан одним концом с приводом 4 и пропущен другим концом по отверстиям 6 звеньев 2 пальца, далее по .поверхностям роликов 12 и через пружину 14 закреплен к боковой поверхности 15 ладони 1. Трос 3 имеет упор 16.. В плоскости каждого пальца в ладони 1 выполнены пазы под упругие планки 17, которые расположены с возможностью взаимодействия с внутренними торцовыми поверхностями 18 звеньев 2 пальца. На пружинные планки 17 установлены быстросменные рабочие элементы 19, колтактирующие с изделием 20.
Захват работает следующим образом. .
Перед работой устанавливаются те или иные рабочие -элементы 19. Захват подается к изделию 20 и включается привод 4. При этом звенья 2 перекатываются по фасонным поверхностям, а пружина 14 растягивается. Трос нагибает пружинящие элементы 13, а звенья 2 в свою-очередь изгибают упругие планки 17 с рабочими элементами 19 к изделию 20. Дальнейшим перемещением троса 3 создается необходимое усилие, после чего привод 4 выключается .и изделие 20 подается захвртом на рабочую позицию. Затем отпускается трос 3, и пружинящие элементы 13 со звеньями 2, а также упругие планки 13 ,с рабочими, элементами 19 занимают первоначальное положение, а изделие 20 освобождается. Захват подается на исходную позицию. Далее цикл повторяется.
Предлагаемый захват надежен при переносе изделий из различных матералов .
фие.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1981 |
|
SU992181A2 |
| Захват манипулятора | 1985 |
|
SU1288057A1 |
| Захват манипулятора | 1980 |
|
SU931465A2 |
| Схват манипулятора | 1982 |
|
SU1060466A2 |
| Захват манипулятора | 1983 |
|
SU1133086A2 |
| Захват манипулятора | 1978 |
|
SU724337A1 |
| Захват манипулятора | 1982 |
|
SU1034897A2 |
| Захват манипулятора | 1979 |
|
SU910410A2 |
| Захват манипулятора | 1985 |
|
SU1551545A2 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2022775C1 |
1. ЗАХВАТ МАНИПУЛЯТОРА по авт. св. № 931465, отличающийся тем/ что, с целью расширения технологических возможностей и повышения надежности, он снабжен упругими планками и роликами, шарнирно установленными на звеньях пальцев, при этом в ладони выполнены пазы под упругие планки, а последние расположены с возможностью взаимодействия с внутренними торцовыми поверхностями звеньев пальцев, кроме того, трос охватывает ролики и посредством дополнительной пружины прикреплен к боковой поверхности ладони, 2. Захват по п. 1, о т. л и ч аю щ и и с я тем, что на последнем звене пальцев установлены по два роО лика.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват манипулятора | 1980 |
|
SU931465A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
