Изобретение относится к грузоподъемным машинам, в частности к строительным подъемникам, используемым при погрузке и выгрузке грузов.
В основном авт.св. № 397452 ;сано устройство для выдвижения грузовой платформы подъемника, .содержёццее тяговый барабан с храповым колесом и рукоятку управления, выполненную в виде подпружиненного рычага со ско1иенным концом, смонтированного в поворотном кронштейне, свободно сидяыем на одной оси с барабаном и взаимодействующим с храповым колесом t11.
.Недостатком этого механизма является то, что в нем не предусмотрено фиксирующее устройство, исключ. самопроизвольный отход платформы с грузом при выдвижении ее из оконного проема нз-за деформации от веса груза направляюци-х, по которым перемещается платформа. Это приводит к непроизвольным затратам времени, уменьшению скорости выдвнжеййя платформы.
Цель изобретения - улучшение
эксплуатационных характеристик устройства.
Для этого устройство сЗнабжено дополнительным храпов1Л 1 колесом и смонтированной в поворотном кронштейне , свободно сидящей на одной оси с. барабаном подпружиненной рукояткой. управления со скошенным концом, вза10имодейств укицим/ с дош:)лнительным храповым колесом, причем храповые колеса расположены на торцах барабана, который выполнен с направляющими канавками, имеющими различное направ15ление, а На pckMe платформы смонтированы фиксаторы для закрепления рукояток.
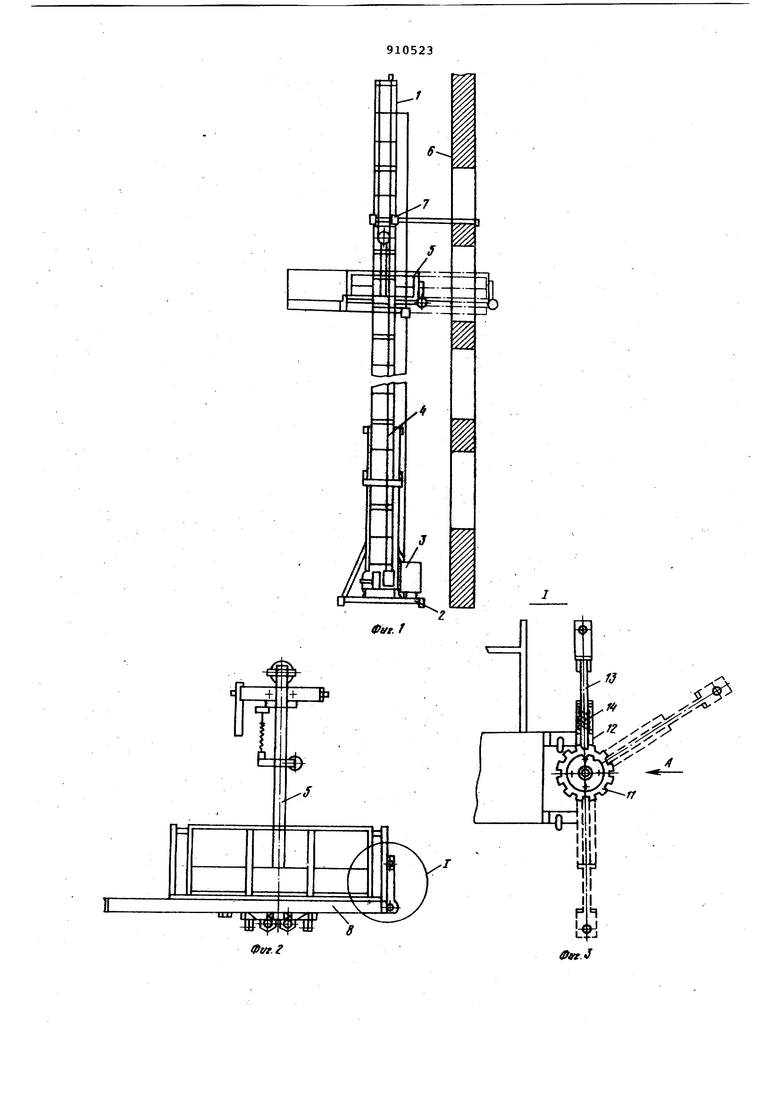
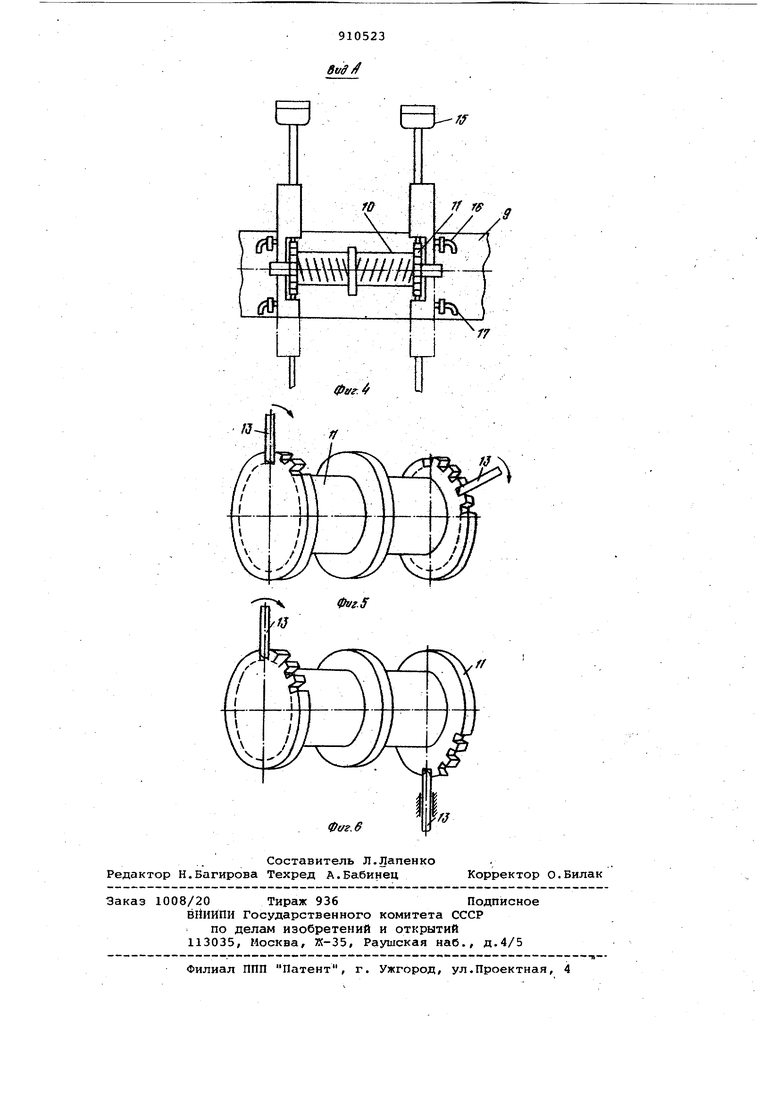
На фиг.1 показан подъемник, общий вид; на фиг. 2 - грузовая ка20ретка; на фиг.З - узел 1 на фиг.2; на фиг.4 - вид А на фиг.3; на фиг.5-схема работы двумя рукоятками (при их последовательном зацеплении с храповым колесом); на фиг.6 - 25 схема рабрты однойрукояткой( при использовании другого рычага в качестве собачки).
Строительный подъемник состоит из мачты 1, установленной на опор30ной раме 2, на которой также распЬ ложена грузовая лебедка 3, На канате 4 подвешена грузовая каретка 5. Мачта крепится к стене здания 6 настенными опоргши 7. Вкачестве грузонесущего органа мо7сет быть использована платформа 8 или бадья. Па торце рамы 9 платформы 8 новлен барабан 10 с правой и левой нарезкой, по торцам которого расположены храповые колеса 11. На осях барабана 10 свободно посажены два крои1чтейна 12. Внутри каждого из кронштейнов установлены релчаги 13 с возможностью вращения вокруг собственной оси и пружины 14 прижи мающие рычаги к храповому колесу. На концах рычагов .имеются рукоятки На раме платформы имеются фиксаторы 16 и 17, удерживающие рычаги в верт кальном положении (соответственно рукояткой вверх или вниз). Концы ры чагов 13, взаимодействующие с храповыми колесами 11, скошены. На барабане запасованы две ветви каната механизма передвижения платформы (на фиг. не показано). Рабата устройства происходит сле дующим образом. После достижения грузовой кареткой 5 требуемого этажа поворачивают рычаги 13 вокруг собственной оси в зависимости от требуемого направления движения платформы, вводят эти рычаги в зацепление с храповыми колесами 11. При этом, если вес груза невелик, то можно работать двумя ры чагами переменно (как показано на фиг.5), и усилие для перемещения платформы будет прикладываться практически непрерывно (подобно дей вию тяговой цепи на ручных талях), а следовательно, при этом исключится самопроизвольный отход платфоргда в сторону, противоположную движению и уменьшатся соответственно крутиль ные колебания мачты. В этом случае скорость движения платформы увеличится не менее, чем в два раза по сравнению с известным устройством, так как исклмчатся непроизводительные паузы, необходимые для возвраще ния рычага в первоначальное положение, и потери времени на устранение самопроизвольного отхода платформы. Если груз велик, тр можно работать одним рычагом, прикладывая силу двумя руками. При этом другой рычаг закрепляется фиксатором 16 (или 17). В этом случае рычаг будет действовать как подпружиненная собачка, исключая самопроизвольный отход платформы. Если груз расположен на платформе, то рычаги 13 при перемещении грузовой каретки 5 по мачте и при использовании одного из рычагов в виде собачки устанавливаются вертикально рукояткой 15 вверх. Если груз расположен в бадье, то рукоятки 15 установлены вертикально вниз. Предлагаемое устройство позволяет увеличить скорость выдвижения платфор 1 ы подъемника, иекл очить самопроизвольный отход ее от здания и дает возможность уменьшить крутильные колебания мачты. Формула изобретения Устройство для выдвижения грузовой платформы подъемника по авт.св. 397452, отлй чающееся тем, что, с целью улучшения эксплуатационных характеристик, оно снабжено дополнительньфл храповым колесом и смонтированной в поворотном кронштейне, свободно сидящей на одной оси с барабаном напружиненной рукояткой управления со.скошенным концом, взаимодействующим с дополнительным xpaпoвы i колесом, причем храповые колеса расположены на торцах барабана, который выполнен с направля1эди1 1и канавками, имеющими различное направление, а на раме платформы смонтированы фиксаторы для закрепления рукояток. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 397452, КЛ4 В 66 В 9/20, 1970 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Строительный подъемник | 1985 |
|
SU1303533A1 |
| Строительный подъемник | 1982 |
|
SU1104088A1 |
| В П Т Б^0ад-§а \ | 1973 |
|
SU397452A1 |
| Грузопассажирский строительный подъемник | 1976 |
|
SU618337A1 |
| Линия для настилания и раскроя полотна | 1978 |
|
SU791579A1 |
| Грузовая каретка строительного подъемника | 1986 |
|
SU1572969A1 |
| ПОДЪЕМНИК ДЛЯ ОСМОТРА СТРОИТЕЛЬНОЙ ЧАСТИ ГИДРОТЕХНИЧЕСКИХ СООРУЖЕНИЙ | 1994 |
|
RU2141444C1 |
| Строительный подъемник | 1990 |
|
SU1761651A1 |
| Ручная лебедка | 1980 |
|
SU919979A1 |
| Подъемник | 1990 |
|
SU1770248A2 |