| Изобретение относится к области систем адаптивного управления, а именно к системам идентификации параметров су- | щественно нестационарного объекта управ- ления.
| Целью изобретения является повыше- |ние быстродействия, запаса устойчивости и i расширение области применения. Рассмотрим метод синтеза алгоритмов адаптации параметров в системе идентифи- |кации параметров нестационарного объек- та управления второго порядка
j (1) (t)x+aoo(t)x+b°(t)u, где ai°(t), a0°(t), b°(t) - переменные во време- |ни параметры,
; x(t), u(t) - выход и вход объекта управления соответственно.
; Выберем модель объекта с настраивае- |мыми параметрами
I
(2) (t)y+a0(t)y+ b(t)u,
где y(t) - выход модели, ai(t), a0(t), b(t) - настраиваемые контуром адаптации пара- медры. Пусть Л «(t) х-у.
Л ai°(t)ai(t)+Aai(t),
Л v a0°(t) a0(t)+ ДаоМ,(3)
Л
.b0(t)b(t)+Ab(t), тогда из (1) и (2) запишем с учетом обозначений (3)
i-ai(t) Ј+a0(t) e+ Aai(t)x+ Aa0(t)x+ Ab(t)u (4)
Выберем функцию Ляпунова
V 0,5 &,(5)
где значение V(t) определим из (4)
V e-ai(t) Ј-a0(t) t-A aT(t)x+A a0H(t)x+ +AbH(t)u.
Найдем производную функции Ляпунова
СП
с со
vj
ю о о
V- VV
(7)
где значение V (t) определим из (6) в виде V (t)A aiH(t)x+ AaiH(t)x+ A40H(t)x+ +Aa0H(t)x+AbH(t)u+AV(t)u(8)
где индекс Н означает требуемые алгоритмы и изменения параметров.
Из (7) и (8) можно записать, опустив в записи t
U VI AaiHx+AaiHxVAaoV/
+Аэонх+АЪни+ДЬни (9)
Для того,чтобы V 0, потребуем
+
AaiHVx 0, AaiHVx 0, Aa0HV x . О,
( V х+
/toV xdt+
a0(t)a0(to)A (
/toVxdt+
d(Vx)
dt b(t)b(t0)- Я ( Vu+
(16) )to V udt +
d(Vu)
dt
).

| название | год | авторы | номер документа |
|---|---|---|---|
| Система адаптивного управления | 1991 |
|
SU1807446A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ С ЭТАЛОННОЙ МОДЕЛЬЮ | 1990 |
|
RU2027211C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |
| АДАПТИВНАЯ НЕЛИНЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1990 |
|
RU2027212C1 |
| Самонастраивающаяся система управления с эталонной моделью | 1990 |
|
SU1827664A1 |
| Система управления | 1991 |
|
SU1792539A3 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НЕСТАЦИОНАРНОГО ОБЪЕКТА С ПЕРЕМЕННЫМ ЗАПАЗДЫВАНИЕМ | 1990 |
|
RU2027214C1 |
| Система автоматического управления | 1984 |
|
SU1168897A1 |
| Система адаптивного управления | 1980 |
|
SU932461A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
Изобретение относится к области автоматики, а именно к системам идентификации параметров нестационарного объекта управления. Изобретение позволяет повысить быстродействие системы за счет введения дифференциальных составляющих в алгоритм адаптации параметров, что повышает скорость убывания функции Ляпунова, запас устойчивости системы и улучшает качество переходных процессов, процедур адаптации параметров, при этом нет требования квазистационарности к параметрам объекта и не требуется решения матричного уравнения Ляпунова, что становится невозможным при значительных диапазонах и скоростях изменения параметров объекта особенно при больших степенях дифференциального уравнения, описывающего состояние объекта. 1 ил.
при этом значение производной функции Ляпунова будет вида
Да0н Vx 0, AbHV u 0, ДЬН Vu 0,
(1°)
и выберем значения параметрических при-у ;Ц(Vx)2+( Vx)2+( Vx)2+( Vx)2+( Vu)2+
ращений из (10) 20-, V
+( J.
-AVx , Vxt to t
-A Vx, Aa0H -A V x,A. const Д aidt-Aa0 / A a0dt Ab Г Abdt 0
0 (11) ,„- - to to
AVu, Vu. .«(17) .
Если теперь к (7) прибавить выражение 2Ьцто обеспечит устойчивость процедур адапt tтации параметров модели к изменяющимся
(Дэ1н / Да0н/ A a0dt+параметрам объекта управления. Реально
to toтребуемые значения не могут быть обеспе+АЬН Г AbHdt)-(AaiH Г A aidt+чены. Действительно использование пара10 to . 30метрической отрицательной обратной связи
+ Да н ГА a dt + Ab) A bHdt)сопровождается статической и динамиче0 to ° t0ской ошибкой. Покажем это на примере од(1,2) ного изменяемого параметра b(t)
и учесть, что выполняются неравенства Vft
tt35Ab(tb(E-aiЈ -a0E )/u }. } , (18)
AaiH ft A adt 0. a0H L A a0Hdt„.u
to г° Jt0а из (3) запишем
..-„у i льнн nrn/b°(t)b(t)+Ab(t),(19)
0, AbHJto Ab dt 0,(13) Где b(t) имеем вид
то из (7) с учетом (12) дополнительно к (10) b(t)b(t0)- AbH(t), t t0(20)
можно записатьДля частного случая
tн,.AbH(t)- AVu(21)
AaiH Jto A aiHdt+ A A aiHV x 0,запишем (21), выразив AbH(t)через текущее
tпараметрическое отклонение Ab(t)
Да0н /to A a0Hdt+ AAa0HVx 0, (14) 45 AbH(t)-Au2 Ab(t)(22)
с учетом (22) из (19) получим в операторной форме
AU2Ab(p)
. AbH /toAbHdt+ АД bHV u 0
b°(phb(p) дополнительно к (1) из (14) запишем
)toAaiHdt -A V x.50
}toAa0Hdt -A Vx,(15)
u /toAb dr--A V u. Ab(pV Ab(p)P
Из (11) и (15) окончательно можно запи- зозф - . . , . .9 . . , . .9
сать алгоритмы адаптации параметров модели
ДЬ(р). (23)
Если учесть, что
Ab(t)b°(t)-b(t0),(24)
то при замыкании отрицательной обратной связи по параметру b(t) получим значение ДЬз«
Дь(Р)р ,9„
1+Au2p- P+AU2 () Система идентификации параметров нестационарного объекта управления представлена на чертеже, где приняты следуюпри этом значение производной функции Ляпунова будет вида
AU2Ab(p)
b°(phb(p)p PoДЬ(р). (23)
Ab(pV Ab(p)P
. . , . .9 . . , . .9
Если учесть, что
Ab(t)b°(t)-b(t0),(24)
то при замыкании отрицательной обратной связи по параметру b(t) получим значение ДЬз«
Дь(Р)р ,9„
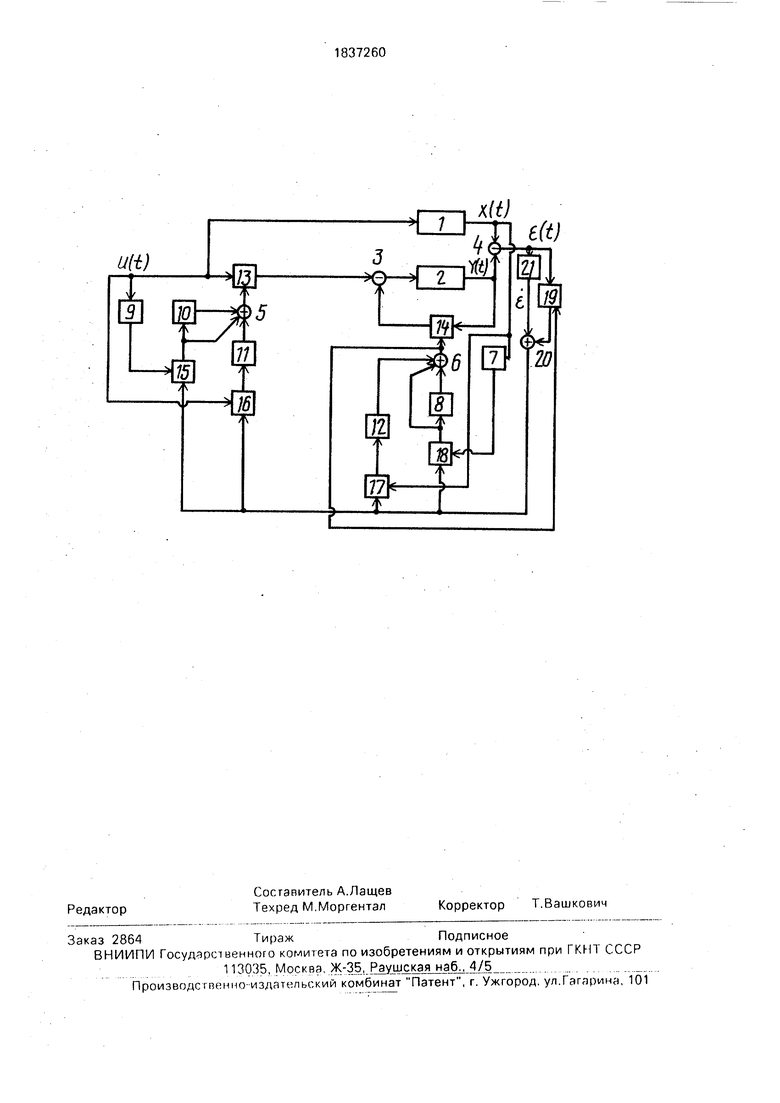
1+Au2p- P+AU2 () Система идентификации параметров нестационарного объекта управления представлена на чертеже, где приняты следующие обозначения: объект 1 управления, блок 2 интегрирования, блоки 3,4 сравнения, сумматоры 5,6. блоки 7,8,9 и 10 дифференцирования, блоки 11, 12 интегрирования, блоки 13,14 с переменным коэффициентом усиления, блоки 15,16,17 и 18 умножения, блок 19 с переменным коэффициентом усиления, сумматор 20, блок дифференцирования 21.
Работает система управления следую- щим образом. Сигнал u(t) поступает на вход блока 13 с переменным коэффициентом усиления, который вместе с блоками 2,3 и 14 представляет собой настраиваемую модель объекта 1 управления. При этом сигнал V (t) и из сигнала Ј (t) с выхода блока 4 сравнения x(t) и y(t) с выходов объекта 1 управления и блока 2 интегрирования. Блок 21 диффе- ренцирова $шя и блок 19 с переменным коэффициентом усиления совместно с сумматором 20 реализует вычисление сигнала V (t), который с выхода сумматора 20 поступает на входы блоков 15,16, 17 и 18 умножения. При этом далее блоки 5,9,10,11,15 и 16 реализуют вторые уравне- ния системы уравнений (16) для настройки параметра блока 13, а блоки 6,7,8.12,17 и 18 - первое уравнение для настройки параметра блока 14 с переменным коэффициентом усиления.
Изменение параметров блоков 13 и 14 производится до тех пор, пока сигнал V(t) не станет равным нулю. В этот момент модель объекта управления будет иметь параметры, которые обеспечивают ту же реакцию на. входной сигнал, что и объект 1 управления.
Таким образом, устройство идентификации может обеспечить определение параметров объекта1 управления и при этом не требуется выполнения гипотезы о квазистационарности параметров последнего и определения параметров матричного уравнения Ляпунова что упрощает синтез контура адаптации и повышает его запас устойчивости.
Формула изобретения Система идентификации параметров, содержащая первый блок с переменным ко-
эффициентом усиления, информационный вход которого является входом системы и соединен с первым входом первого блока умножения, а выход подключен к первому входу первого блока сравнения, объект управления, выход которого является выходом системы и соединен с первым входом второго блока умножения и первым входом второго блока сравнения, второй вход которого через блок с переменным коэффициентом усиления подключен к второму входу первого блока сравнения, а выход подключен к входу первого блока дифференцирования, вторые входы первого и второго блоков умножения соединены с первым входом третьего блока умножения, и первый блок интегрирования, о тличающаяся тем, что в нее введены третий блок с переменным коэффициентом усиления, три сумматора, второй и третий блоки интегрирования, второй - пятый блоки дифференцирования и четвертый блок умножения, выход первого блока сравнения через первый блок интегрирования подключен к второму входу второго блока сравнения, выход которого через третий блок с переменным коэффициентом усиления подключен к первому входу первого сумматора, второй вход которого соединен с выходом первого блока дифференцирования, а выход соединен с первыми входами третьего и четвертого блоков умножения, выходы которых соединены с первыми входами третьего и второго сумматоров непосредственно и с их вторыми входами через пятый и четвертый блоки дифференцирования соответственно, вход системы через второй блок дифференцирования подключен к второму входу четвертого блока умножения и соединен с входом объекта управления, выход которого через третий блок дифференцирования подключен к второму входу третьего блока умножения, выход первого и второго блоков умножения через второй и третий блоки интегрирования подключены к третьим входам соответственно второго и третьего сумматоров, выходы которых подключены к управляющим входам соответственно первого, второго и третьего блоков с переменным коэффициентом усиления.
U(i)
e(t)
| Санковский Е.А | |||
| и Крутиков В.В | |||
| Само|настраивающиеся системы управления с эталонными моделями | |||
| Минск, Наука итех ника, 1970, с | |||
| Соломорезка | 1918 |
|
SU157A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
