Изобретение относится к машиностроению, а именно к промышленным роботами манипуляторам для автоматизации технологических процессов траиспортировки, укладки деталей, сборки..
По основному авт. св. № 738867 известен исполнительный орган промьааленного робота, выполненный в виде установленной на предплечье кисти со охватом, несущим параллельные губки, цепи кинематических связей и привод, причем одна из губок снабжена бесконечной упругой лентой 1.
Недостатком известного исполнительного органа является невозможность определения наличия детали между губками при выходе исполнительного органа на рабочую позицию, что снижает надежность работы устройства.
Целью изобретения является повышение надежности работы исполнительного органа.
Цель достигается тем, что губка, не снабжена бесконечной упругой лентой, снабжена светооптической системой, имеющей оптиковолоконный жгут, фотодатчик, фотоприемник и объектив, и планкой с окном, установленной с возможностью перемещения относительно губки, причем объектив светооптической системы установлен в окне планки.
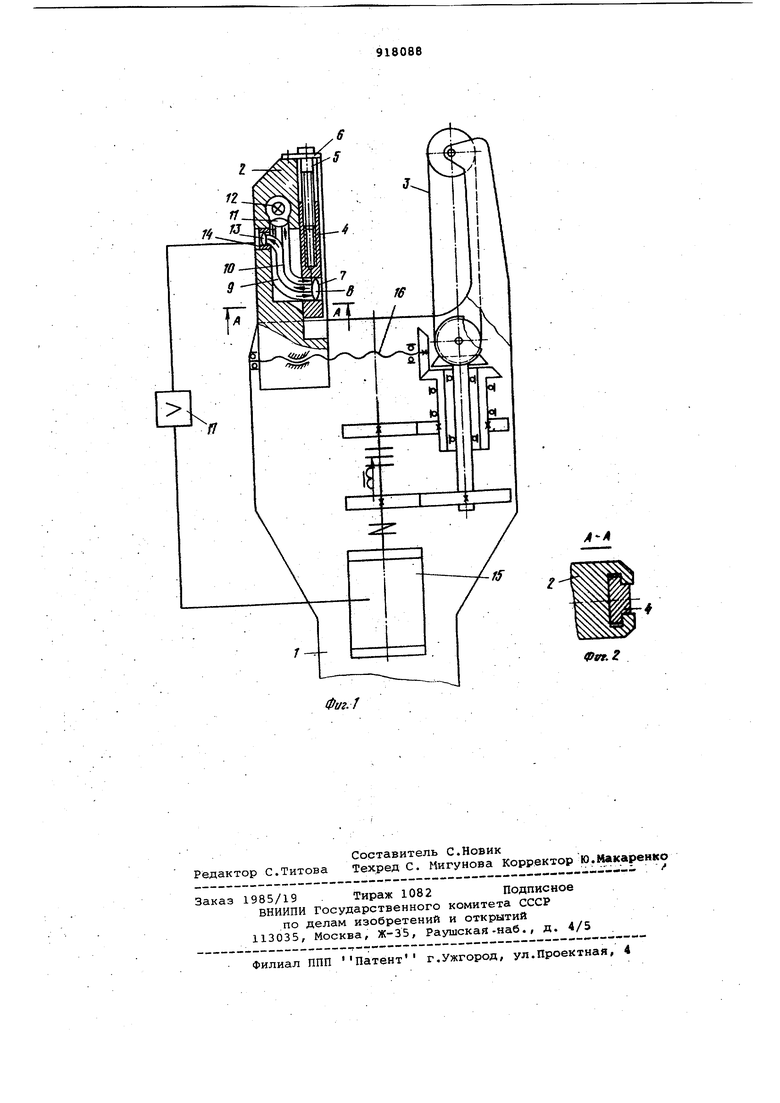
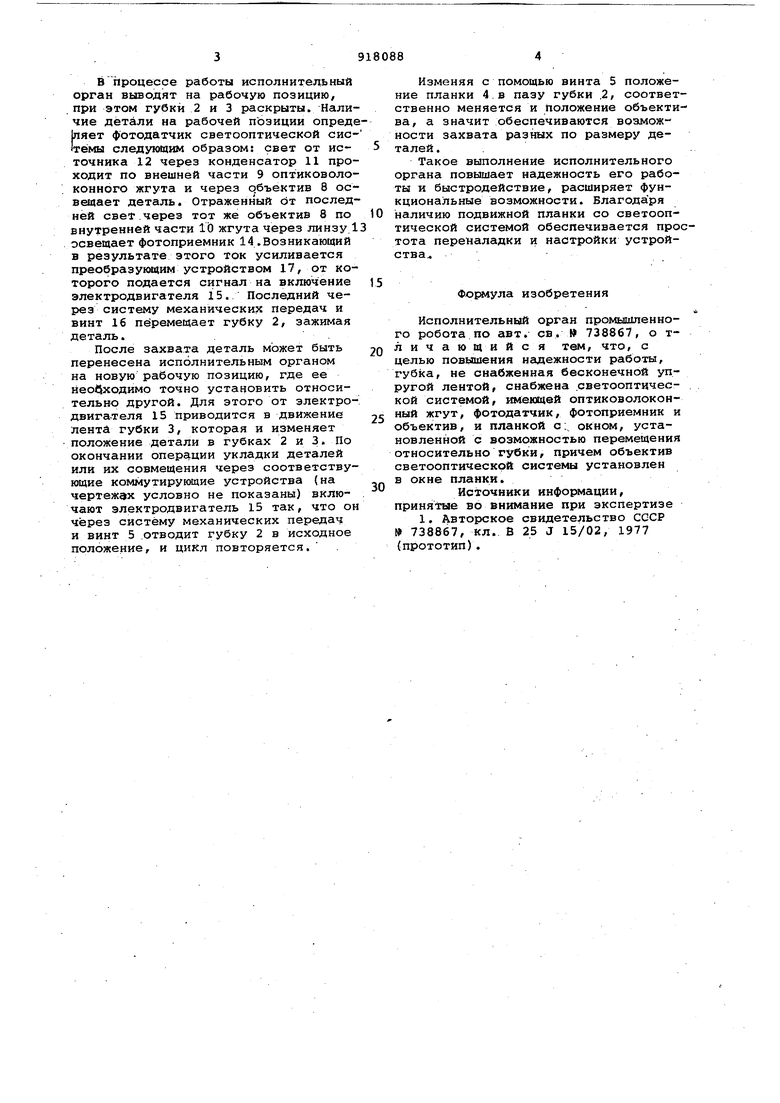
На фиг. 1 изображена схема исполнительного органа; на фиг. 2 - разрез А-А на фиг. 1.
Исполнительный орган проььшшенного робота содержит кисть 1 с губками 2 и 3. Губка 2 выполнена с пазом, в
10 котором установлена планка 4 с-возможностью перемещения от винта 5, установленного в скобе 6. в планке 4 выполнено окно 7.
Губка 2 в планкой 4 снабжень све15тооптической системой, включающей объектив 8, оптиковолоконный жгут, имеющий периферийную часть 9 и внутренню часть 10 волокон, конденсатор II, источник 12 света, линзу 13 и
20 фотоприемник 14. Объектив 8 светооптической системы установлен в окне 7 планки 4. Губка 3 выполнена в виде . бесконечной упругой ленты.
Обе губки -2 и 3 имеют единый при25 вод-электродвигатель 15 и систему механических передач с винтом 16, взаимодействующим с губкой 2. Цепь управления работой -исполнительного органа содержит преобразующее устрой30ство 17.
В процессе работы исполнительный орган выводят на рабочую позицию, . при этом губки 2 и 3 раскрыты. Наличие детали на рабочей пЪэиции опреде1ляет фотодатчик светооптической сиеiTeNttJ следующим образом: свет от источника 12 через конденсатор 11 проходит по внешней части 9 оптиковолоконного жгута и через рбъектив В освещает деталь. Отраженный от последней свет через тот же объектив 8 по внутренней части 10 жгута через линзу.1 освещает фотоприемник 14 .Возникающий в результате этого ток усиливается преобразующим устройством 17, от которого подается сигнал на включение электродвигателя 15. Последний через систему механических передач и винт 16 перемещает губку 2, зажимая деталь. ..
После захвата деталь может быть перенесена исполнительным органом на новую рабочую позицию, где ее необходимо точно установить относительно другой. Для этого от электродвигателя 15 приводится в движение лентй губки 3, которая и изменяет положение детали в губках 2 и 3. По окончании операции укладки деталей или их совмещения через соответствующие коммутирующие устройства (на чертежах условно не показаны) включают электродвигатель 15 так, что он через систему механических передач и винт 5 .отводит губку 2 в исходное положение, и цикл повторяется. .
Изменяя с помощью винта 5 положение планки 4. в пазу губки .2, соответственно меняется и Положение объектива, а значит обеспечиваются возможности захвата разных по размеру деталей. .
Такое выполнение исполнительного органа повышает надежность его работы и быстродействие, расширяет функциональные возможности. Благодаря наличию подвижной планки со светооптической системой обеспечивается простота переналадки и настройки устройства..
Формула изобретения
Исполнительный орган промышленного робота по авт. ев. 738867, о тличающийся тем, что, с целью повышения нгшвжности работы, губка, не снабженная бесконечной упругой лентой, снабжена .светооптической системой, имеющей оптиковолоконный жгут, фотодатчик, фотоприемник и объектив, и планкой с: окном, установленной с возможностью перемещения относительно губки, причем объектив светооптической системы установлен в окне планки.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 738867, кл. В 25 J 15/02, 1977 (прототип).
-А
9tn,Z
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган промышленного робота | 1977 |
|
SU738867A1 |
| Исполнительный орган промышленного робота | 1979 |
|
SU781054A1 |
| Комплекс для автоматической штамповки деталей из ленточного материала | 1985 |
|
SU1329873A1 |
| Фотоэлектрический датчик | 1979 |
|
SU837659A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1530442A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИЗНОСА КОНТАКТНОГО ПРОВОДА | 1999 |
|
RU2174214C2 |
| Устройство для последовательной подачи заготовок к схвату робота | 1982 |
|
SU1299490A3 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2008 |
|
RU2371305C1 |
| Способ определения положения сварного шва и устройство для его осуществления | 1981 |
|
SU1348109A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1440711A1 |