(54) ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ЯРЩКОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство Кривовязюка для отделения листов от стопы и подачи их в рабочую зону пресса | 1979 |
|
SU871927A2 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2521469C1 |
| Устройство кривовязюков для вырубкизАгОТОВОК из пОлОСОВОгО илЕНТОчНОгО МАТЕРиАлА | 1979 |
|
SU804501A1 |
| Регулятор старости вращения веретен прядильного ватера | 1936 |
|
SU57122A1 |
| СПОСОБ УСТРОЙСТВА ДЛЯ СМЕСКИ ШЕРСТЕЙ | 1926 |
|
SU5863A1 |
| Устройство для смены шпуль на кольцевых ватерах | 1939 |
|
SU59460A1 |
| Устройство для съема бобин на ватерах | 1934 |
|
SU44470A1 |
| МАШИНА ДЛЯ ФОРМОВКИ ШИШЕК | 1933 |
|
SU38746A1 |
| Устройство для подвязки растений к шпалерной проволоке | 1979 |
|
SU923450A1 |
| ПЕЧАТНО-ОТМЕТОЧНАЯ МАШИНА | 1968 |
|
SU210186A1 |
1
Изобретение относится к пакетоформирую1чим и пакеторазборочным машинам, а именно к устройствам для автоматического захвата и переноса ящиков , в процессе их формирования в пакет или при разборке пакета.
Известно захватное устройство, содержащее траверсу, захватные рычаги, шарнирно прикрепленные к ней, и распорньй клин, взаимодействующий с захватными рычагами. . Недостатком известного устройства является то, что управление захватными рычагами происходит не автоматически.
Целью изобретения является автоматизация процесса захвата и освобождения япиков в процессе формирования их в пакет в пакетоформирующих машинах.
Эта цель достигается тем, что захватное устройство снабжено рамой с вертикальной планкой, имеющей продольный паз, и закрепленным на тра-
верее механизмом фиксации рычагов в рабочем положении, содержащим расположенные в корпусе горизонтальный фиксирующий палец, вьтолненный с зубьями, взаимодействугачими с двумя зубчатыми секторами, один из которых жестко закреплен на оси, rik которой также жестко установлен реечный валик, взаимодействующий с храповиком и пестерней, установленной 4ia той же оси свободно, а другой зубчатый сектор свободно установлен на другой оси, при этом в траверсе выполнены гнезда для фиксирующего пальца.
Кроме того, захватные рычаги выполнены подпружиненными.
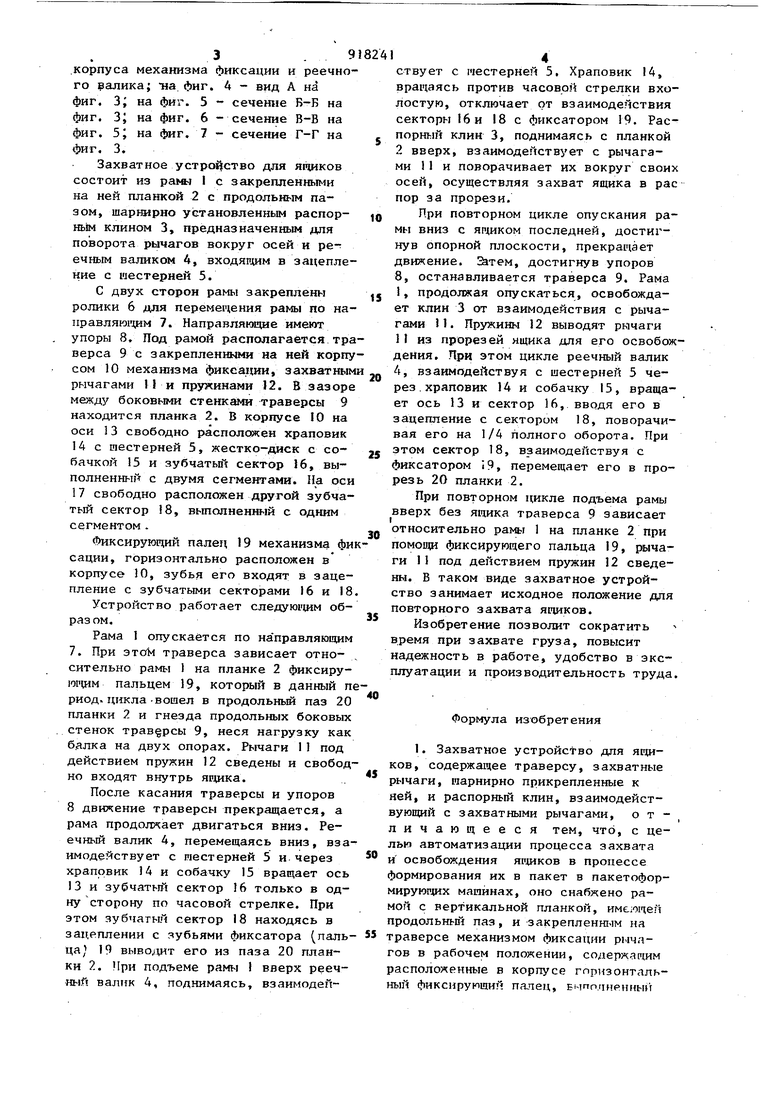
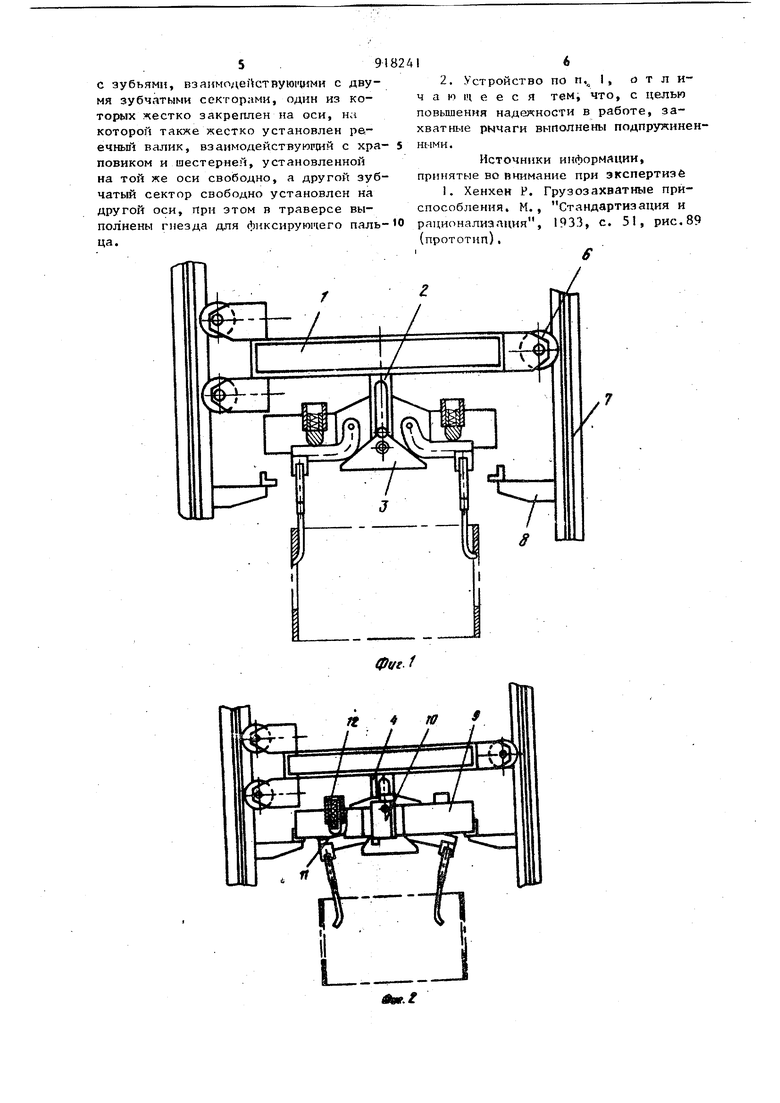
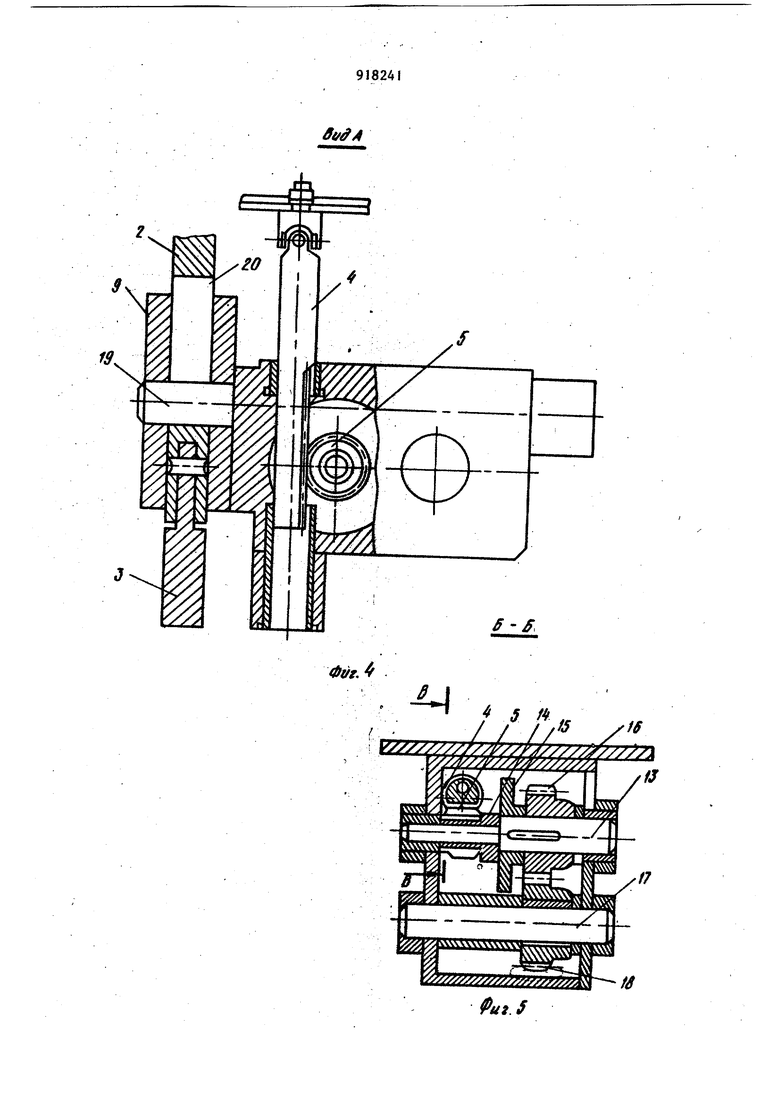
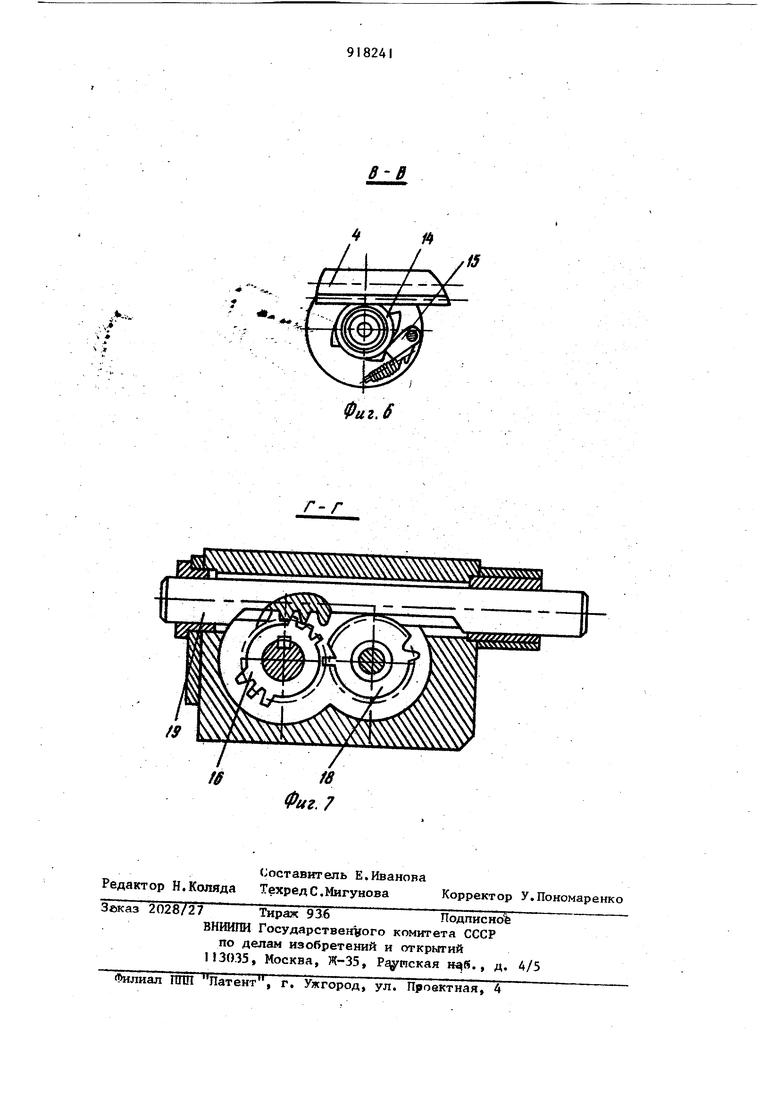
На фиг. I изображен вид спереди захватного устройства без боковой продольной стенки траверсы и с разведеиными рычагами; на фиг. 2 то же, с частичным вырезом боковой продольной стенки А со сведенны и рычагами; на фиг. 3 - вид спереди 3 . 9 корпуса механизма фиксации и реечного эалика; на фиг. 4 - вид А на фиг. 3j на фиг. 5 - сечение Б-Б на фиг. 3J на фиг. 6 - сечение В-В на фиг. 5у на фиг. 7 - сечение Г-Г на фиг. 3. Захватное уCTpoi cTBO для яршков состоит из раю I с закрепленными на ней планкой 2 с продольным пазом, шарнирно установленным распорffi)iM клином 3, предназначенным для поворота рычагов вокруг осей и ре-; ечным валиком 4, входящим в зацепление с шестерней 5. С двух сторон рамы закреплены ролики 6 для переме1чения рамы по направляюрдам 7. Направляющие имеют упоры 8. Под рамой располагается тра верса 9с закрепленными на ней корпу сом 10 механизма фиксации, захватным рычагами I и пружинами 12. В зазоре между боковыми стенками траверсы 9 находится планка 2. В корпусе 10 на оси 13 свободно располсжен храповик 14 с шестерней 5, жестко-диск с собачкой 15 и зубчатьпЧ сектор 16, выполненный с двумя сегментами. На оси 17 свободно расположен другой зубчатый сектор 8, выполненный с одним сегментом . Фиксирующий палец 19 механизма фи сации, горизонтально расположен в корпусе 10, зубья его входят в зацепление с зубчатыми секторами 16 и 18 Устройство работает следуюгщм образ ом. Рама 1 опускается по направляющим 7. При этом траверса зависает относительно рамы 1 на планке 2 фиксируЮ11им пальцем 19, который в данный п риод. цикла-вошел в продольный паз 20 планки 2 и гнезда продольных боковых стенок траверсы 9, неся нагрузку как б.алка на двух опорах. Рычаги 1 1 под действием пружин 12 сведены и свобод но входят внутрь ягщка. После касания траверсы и упоров 8 движение траверсы прекращается, а рама продолжает двигаться вниз. Реечный валик 4, перемещаясь вниз, вза имодействует с шестерней 5 и-через храповик 14 и собачку 15 вращает ось 13 и зубчатый сектор 16 только в одну сторону по часовой стрелке. При этом зубчатый сектор 18 находясь в зацеплении с зубьями фиксатора (паль ца 19 выводит его из паза 20 планки -. При подъеме рамы 1 вверх реечный валик 4, поднимаясь, взаимодей4ствует с шестерней 5. Храповик 14, вращаясь против часовой стрелки вхолостую, отключает от взаимоде ствия секторы 16 и 18 с фиксатором 19. Распорный клин 3, поднимаясь с планкой 2 вверх, взаимодействует с рычагами 11 и поворачивает их вокруг своих осей, осуществляя захват ящика в рас пор за прорези. При повторном цикле опускания рамы вниз с ярдиком последней, достигнув опорной плоскости, прекращает движение. , достигнув упоров 8, останавливается траверса 9. Рама 1, продолжая опускаться, освобождает клин 3 от взаимодействия с рычагами П. Пружины 12 выводят рычаги 1I из прорезей ящика для его освобождения. При этом цикле реечга,1й валик 4, взаимодействуя с шестерней 5 через . храповик 14 и собачку 15, вращает ось 13 и сектор 16,. вводя его в зацепление с сектором 18, поворачивая его на 1/4 полного оборота. При этом сектор 18, взаимодействуя с фиксатором 19, перемещает его в прорезь 20 планки 2. При повторном цикле подъема рамы вверх без ящика траверса 9 зависает относительно рамы 1 на планке 2 при помоида фиксирующего пальца 19, рычаги 11 под действием пружин 12 сведены. В таком виде захватное устройство занимает исходное положение для повторного захвата ящиков. Изобретение позволит сократить время при захвате груза, повысит надежность в работе, удобство в эксплуатации и производительность труда. Формула изобретения 1. Захватное устройство для ягди- ков, содержащее траверсу, захватные рычаги, шарнирно прикрепленные к ней, и распорньй клин, взаимодействующий с захватными рычагами, отличающееся тем, что, с целью автоматизации процесса захвата и освобождения ярдаков в пропессе формирования их в пакет в пакетоформируюгдих машинах, оно снабжено рамой с вертикальной планкой, продольш-й паз, и закрепленге-iM на траверсе механизмом фиксации рычагов в рабочем положении, содеркарщм расположенные в корпусе горизонтальный фиксирующий палец, Еипплненныи 59 с зубьями, взаимодействую1щмн с двумя зубчатыми секторами, один из которых кестко закреплен на оси, на которой также жестко установлен реечньпЧ валик, взаимодействуюгщй с хра повиком и шестерней, установленной на той же оси свободно, а другой зуб чатый сектор свободно установлен на другой оси. При этом в траверсе выполнены гнезда для фиксирующего паль ца. 1 - 162. Устройство по п. I , о т л ич а ю ц е е с я тем; что, с целью повышения надежности в работе, захватные рычаги выполнены подпружиненними. Источники информации, принятые во внимание при экспертизе 1. Хенхен Р. Грузозахватные приспособления. М., Стандартизация и рационализация, 1933, с. 51, рис,89 (прототип).
7
Ж
Фог.З
фуг.
.
///,хГ,
f 77f 77J ///7/ /7777.
Y yyZ/y.
,
/ /-1 ч71
fS
Фи9.$
,л
Фиг. S
