I
Изобретение относится к области . подъемно-транспортной тенхики, в частности, к грузозахватным устройствам для изделий с центральньм отверстием малой опорной поверхности.
Известен захват для подъема изделий р центральным стверстиём, содержап(ий цилиндрический корпус, внутри которого размецены тяга, имеющая возможность возвратно-поступательногр перемещения, связанные с тягой рычаги с качательно-подвижными подхватами и фиксатор положения рычагов.
Однако, такие захваты не обеспечивакуг поштучного заборами выдачи изделий.
Целью изобретения является расширение эксплуатационных возможностей путем поитучного забора и выдачи изделий.
Для достижения поставленной цели захнат снабже;; установленным иа. корпусе с возможностью возвратно-
поступательного движения стопором, в котором размещена с возможностью поворота тяга, выполненная в виде полого цилиндра. При зтом 1М1чаги парнирно прикреплены к стакану, а подхваты также шарнирно прикреплены к рычагам и к корпусу, причем фиксатор выполнен в виде двух взаимодействующих шестерен с наружным и внутренним зацеплением, первая из которых жестко соединена с верхним концом тяги, а вторая - с в.ерхним концом корпуса.
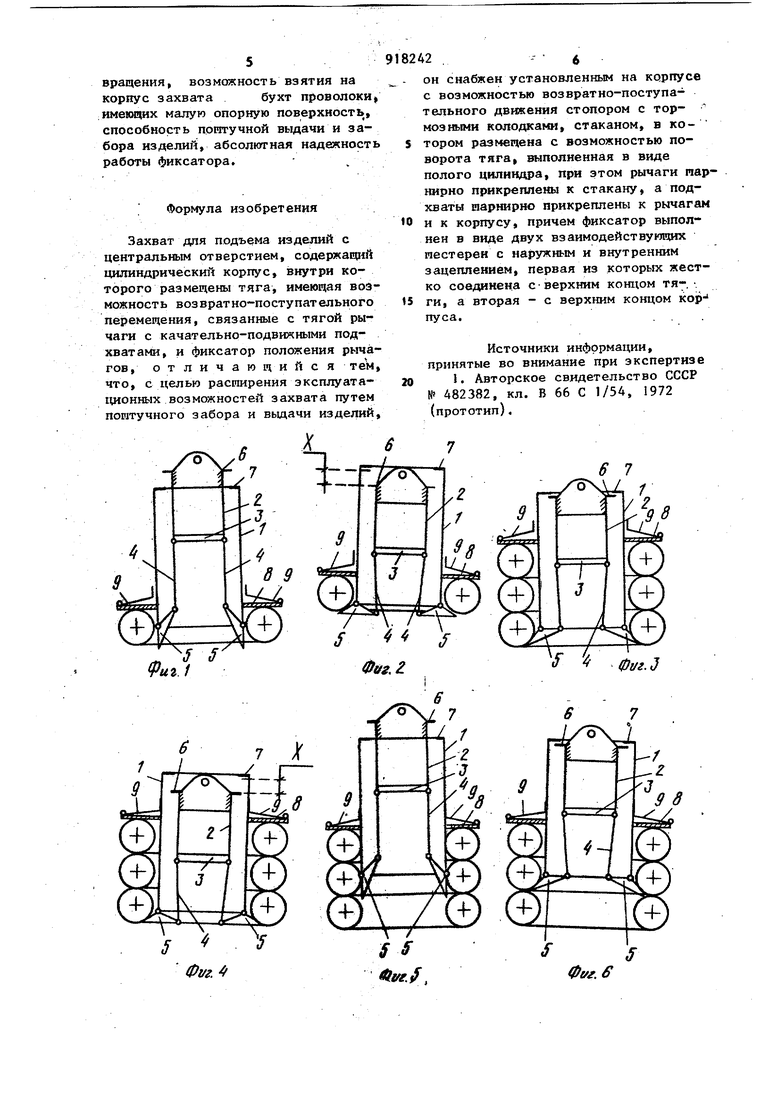
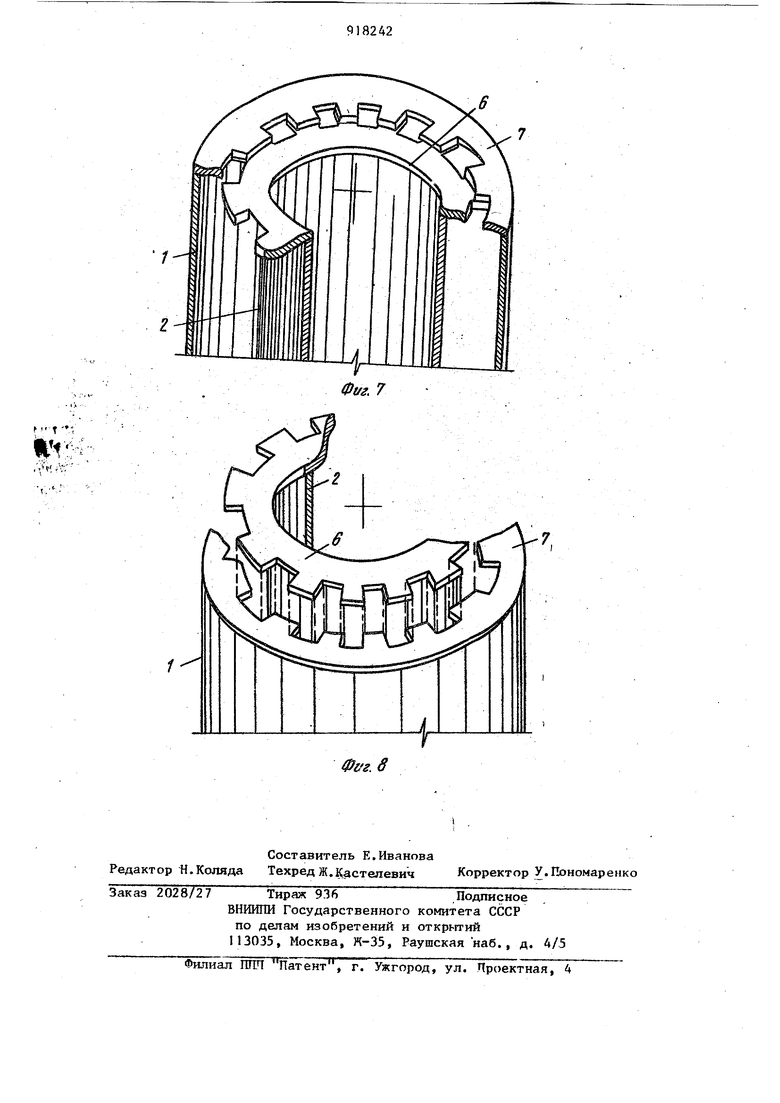
На фиг. I и на фиг. 2 показан захват в положении забора в разре381 на г. 3 - то же в процессе транспортировки изделий на фиг. 4-6 - то же в процессе поштучной выдачи изделий иа фиг. 7 - положение фиксатора при подъеме и-транспортировке изделий; на (. 8 - пoлoжe me фиксатора при захвате изделий и их вьщаче.
Захват содержит цилиндрический корпус 1, в котором размещена 2, выполненная в виде полого ци- линдра, имеющего возможность возвратно-поступательного движения в осевом направлении и вращательно-прерьгаистого вдсу1Ь своего поперечного сечения на участке X при передвдасении тяги 2 снизу вверх. Тяга 2 одной стороной со скольжением закреплена в стакане 3, к которому один за другим шарнирно крепятся 1Я 1чаги 4 и-подхваты 5. Подхваты 5 своими серединами шарнирно св язаны с одним из концов корпуса 1. С другой стороны к тяге 2 жестко прикреплейа иестерня 6 с наружным зацеплением. Другая чаестёр- ts но, ня 7 прикреплена к верхне концу корпуса и имеет внутреннее зацепление. Для понтучной выдачи изделий установлен стопор 8 с возможкостью возвратно-гпоступательного движения на JQ корпусе 1, снабженный тормозньми колодками 9, контактируювщми с корпусом t при его передвижении с крайнего верхнего, в. крайнее,нижнее положение, для (шксации корпуса 1 на изделии. Работает захват следуювим образом В рабочем положении забора издели захватом корпус t подвешивается на крюк грузоподъемного механизма поср ством тяги 2. Приспуцвнная в корпус i тяга 2 начинает подниматься, одновременно разворачиваясь вдоль своего поперечного сечения на участке X до тех пор, пока гаестерия 6 тяги 2 не Дойдет двух своих толсшн до пестерни 7. Далее поступательное движение тяги 2 совершается без её разворота При выравнивании уровней половин шестерен 6 и 7 их -зубья совпадают, в результате чего тяга 2 беспрепятственно продолжает подниматься дальше Приподнчвршсь до крайнего верхнего положения тяга 2 увлечет за собой иарнирно связанные рычаги 4 и подхваты 5, в результате чего подхваты 5 встанут в положение параллельно образугадей корпуса 1. Производим спуск на наделение с центральнш отв стием, црр этом подхваты 5 под весом тяги 2 заводятся под-, изделие ложась на пол. При повторном подъеме устройства с помощью грузоподъемного механизма тяга 2 повторно начикаето подниматься в корпусе 1, одновременно разворачиваясь вдоль: своего поперечного сечения на участке X до тех пор, пока шестерня 6 тяги 2 не дойдет двух своих толщин до шестерни 7. Далее поступательное
движение тяги 2 совершается без ее разворота. Выравнивание уровней гаестерен 6 и 7 не происходит из-за несовиадения их зубьев, в результате чего
рычаги 4, не имеющее возможности дальнейшего перемещения, фиксируют подхваты 5 в положении, препятствующем выпадению изделия с центральным отверстием в корпусе 1. Дальнейиий забор послеяую цих изделий до полного заполнения поверхности корпуса 1 производится аналогично.
Предлагаемое устройство в рабочем положении по выдаче изделий поштучнабранных до заполнения на корпусе 1, опускается на место потребления изделия. Тяга 2, продолжая опускаться в корпусе 1 до крайнего нижнего, своего положения, позволяет подхватам 5 лечь. Производят подъем грузоподъемным механизмом тяги 2, которая будет одновременно разворачиваться вдоль своего поперечного сечения на участке X до тех пор, пока шестерня 6 тяги 2 не дойдет двух своих толрдан до шестерни 7 корпуса 1. Далее поступательное движение тяги 2 совершается без ее развората. Зубья шестерен 6 и 7, совпадая, создадут возможность тяге 2 беспрепятственно подниматься дальше, увлекая за собой рычаги 4, подхваты 5, вставшие в положение, параллельное образующей корпуса 1 и сам корпус I. Поднимая устройство на высоту одного изделия с центральным отверстием, производят его спуск, а кольцо 8 опустится вдоль корпуса 1, на величину толщины одного изделия. Гарантированное торможение корпуса 1 при опускании захвата осуществляется с помощью тормозных колодок 9, установленных на кольце 8. Фиксация корпуса 1 позволяет опустить тягу 2 до крайнего нижнего положения, чтобы снова производя ее подъем, дать возможность ей совершить разворот вдоль своего поперечного сечения для несовпадения зубьев шестерен 6 и 7. В результате этого подхваты 5 будут подведены под пакет изделий, но уже без одного. Производят дальнейший подъем и транспортировку захвата с оставшимися изделиями. Дальнейшая выдача изделий производится аналогично. вПреимуществами предлагаемого захвата преимущественное использование простых в изготовлении тел i
вращения, возмсвкность взятия на корпус захватабухт проволоки,
:имеющих малую опорную поверхность, способность поштучной выдачи и забора изделий, абсолютная надежность работы фиксатора.
Формула изобретения
Захват для подъема изделий с централыаз1м отверстием, содержащий цилиндрический корпус, внутри которого размещены тяга, имеющая возможность возвратно-поступательного перемещения, связанные с тягой рычаги с качательно-подвижными подхватами, и фиксатор положения рычагов, отличающийся тем, что, с целью расиирения эксплуатационных возможностей захвата путем поштучного забора и выдачи изделий.
18242 .6
- он снабжен установленным на корпусе с возможностью возвратно-поступательного движения стопором с тор- мозными колодками, стаканом, в котором размещена с возможностью поворота тяга, выполненная в виде полого цилиндра, при этом рычаги парнирно прикреплены к стакану, а подхваты шарнирно прикреплены к рычагам
О и к корпусу, причем фиксатор выполнен в виде двух взаимодействующих пестерей с наружным и внутренним зацеплением, первая из которых жестко соединена сверхним концом тя-.
5 ги, а вторая - с верхним концом Koip- пуса.
Источники информации, принятые во внимание при экспертизе 20 5. Авторское свидетельство СССР № 482382, кл. В 66 С 1/54, 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической подачи заготовок и выдачи готовых задников к машине для формования задников | 1955 |
|
SU107378A1 |
| Автомат питания для штучных изделий | 1985 |
|
SU1344578A1 |
| Захват для изделий с центральным отверстием | 1972 |
|
SU482382A1 |
| Захват для изделий | 1979 |
|
SU918246A1 |
| Захват для изделий с центральным отверстием | 1989 |
|
SU1761654A1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 2006 |
|
RU2313478C1 |
| Роторный автомат питания | 1983 |
|
SU1093475A1 |
| Роторный автомат питания | 1985 |
|
SU1250440A1 |
| Многопозиционный автомат для сборки корпусных деталей с деталями типа подшипников и крышек | 1974 |
|
SU545443A1 |
| Устройство для лужения выводов радиоэлементов | 1990 |
|
SU1787717A1 |
ttv-;
,V4.V-
