при пращении барабаня 2 осу- тес тиля m подачу дйталой в гпиРеры I 9 , HIicjir;ufH( пгпптупчо подяют их п ори-- ч /гг прм / , 1и;ек)1ди иг диружниенныс ... | чи ) дчп чахпзтя, лряще1
Ияобрртеиио .я к антомати чацим )логических процессов в м р|И1Г()С гроеиии, л именно к ротг)рным 11 |пм,1 ;1М шп аиии дли подачи штучны iniiU Knx члго гоппк к чону обраПотки, II;H им Vint-г т и (Ml и о JVTH рс1тпрпо-1сон 1ейеIIMX ,
iI Mi . и-1 ч | чия - ijaciiiHpPHiU Г Ч1Г11.111 irit ii 1-ки.ч и( 1М()жП1К гей vf поиы iii HHi 11адс/1И11ГТИ работы jHiiopHoro .III гомач л дня питании путс м об(спече- икл 1Т П1п уч11оП ориентадии плоских дс- fii( сломпюй конфигурации и прину- ajfrcjn.iioi i 11(|дачп их п .
На itiur.l п 1пбражеи рот орпый анто- 4.1 г пи гапич, ИД (чи рху; н,1 фиг. 2 - . tjir Л Л HI ifinr. I ; на (|)vn . 1 - VHM f Ч.Ч фпг. ; и,1 .4 - нид Н на фиг. t; u.i I lnr.S - рачр( ч R-B па ( : ча itiMr.f) - iiaapo i Г-Г пп .. ft bin- иид, /I на ilinr . .
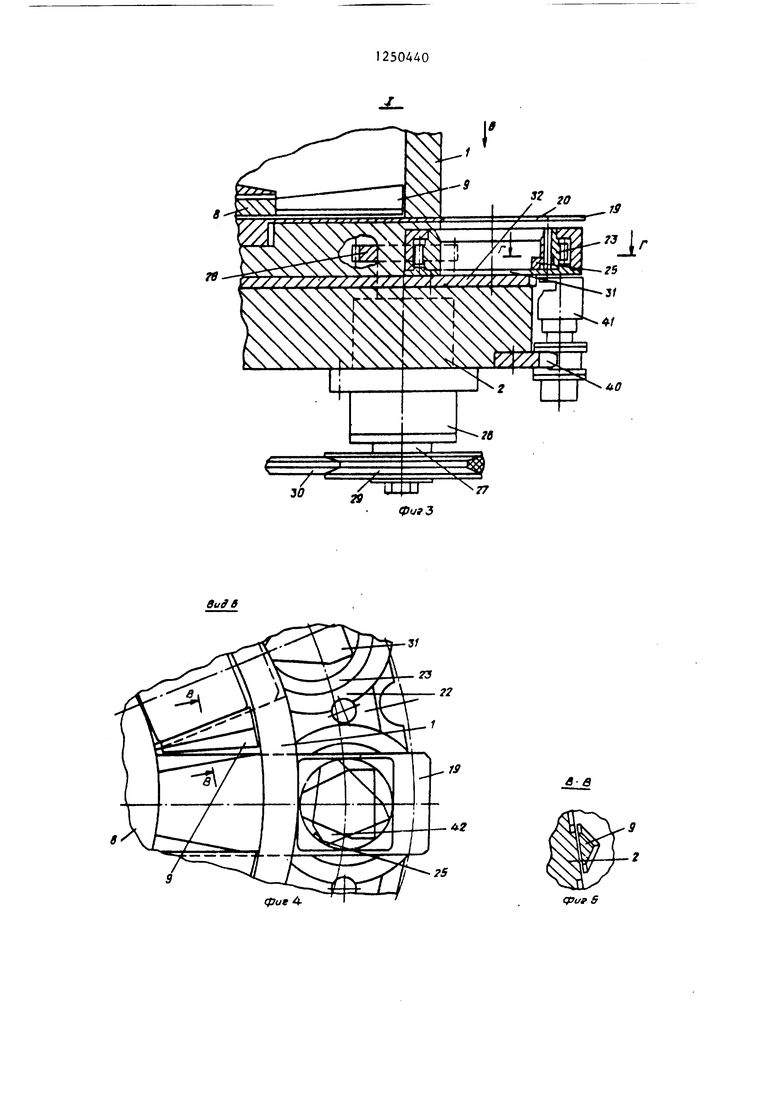
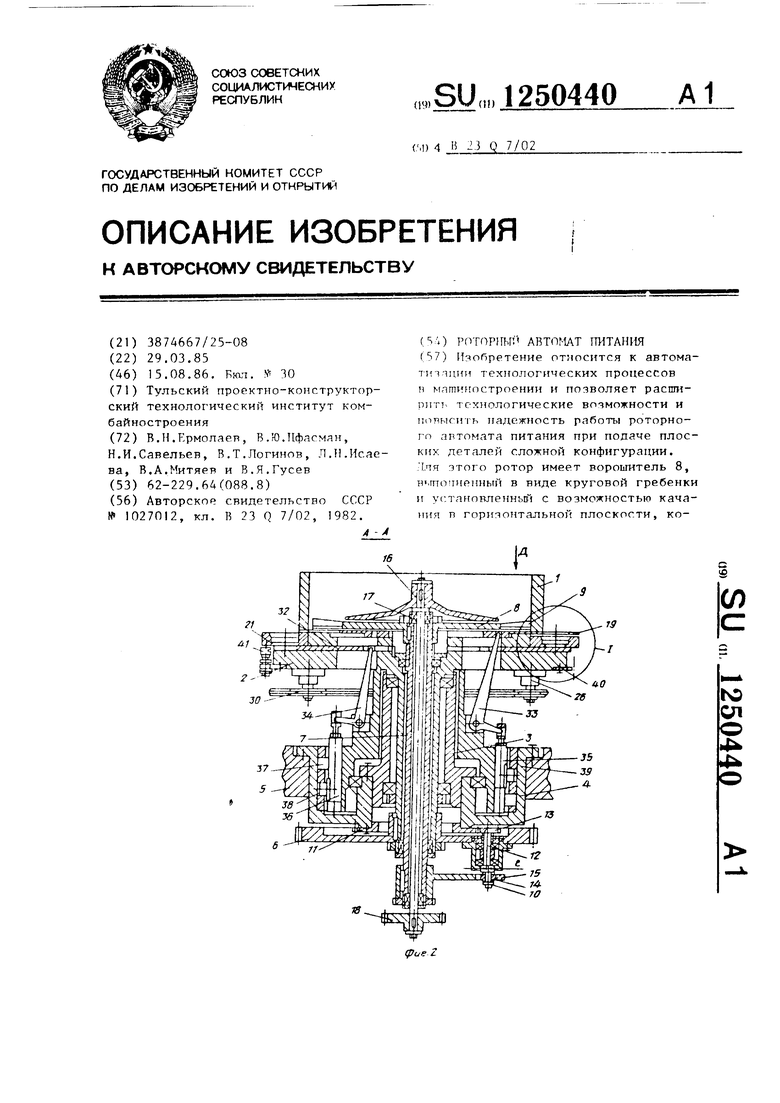
-. , it. 11гмма 1 nvcrannn сог Т(1Ит ii -f I т р (пч11(Ч о fiyjiKPpa 1 (фиг . 1) , :м riui Г ИМ П1И(И (1 с блраблном 2. liii;--ii iiir(i .-iiiifirviHo 11огаж(М( па 1 умбу . :iii f iH(. I M) iannvi( fo гаканом 4, ;iiMi4Hi4(iii.rM ii расточку ст/п1И(п.1 S, и гпяаам приипдпой пн- г терпели fi с при- иодом (Hf rioK.Ttan) . В центральной раг |-пчк(, PapafSaFia 2 свободно и соос- Н(1 устаппплсп пал /, на перхнем кон- Kivropor c жестко такреплен Hopoimi- тглт, 8, ш.гполпонный п ииде круговой гребопки с чубт,ями 9, имеющими ско- цк-пш.к кромки {г}1иг.5). ila нижнем конце нала / )акрО11, 1ен pi,prar 10 привода качания ворошителя Я в пиде нланртар Hort передачи, и которой поди.чом явля ечс н прииодиан пкм.-терни f), а 1ь-1л1,11мм t, (1.г1(ч (-IM - гиегт ерня 1 1 , жестко члкркплеипая на стакане 4. 1 расточке тестер}п( 6 гнободно рагчме1цен пал 12, на одпом КСИЩР которгп-о гто- ;гжепа щргтерпя-сателлит 13, а fia
ния и совмещения деталей с окном- трафаретом, атем толкателем 32 детали подаются в приемник, выполнен- н пиде охватыпающего ротор кон- .T 41 с яяхнатами, 7 ил.
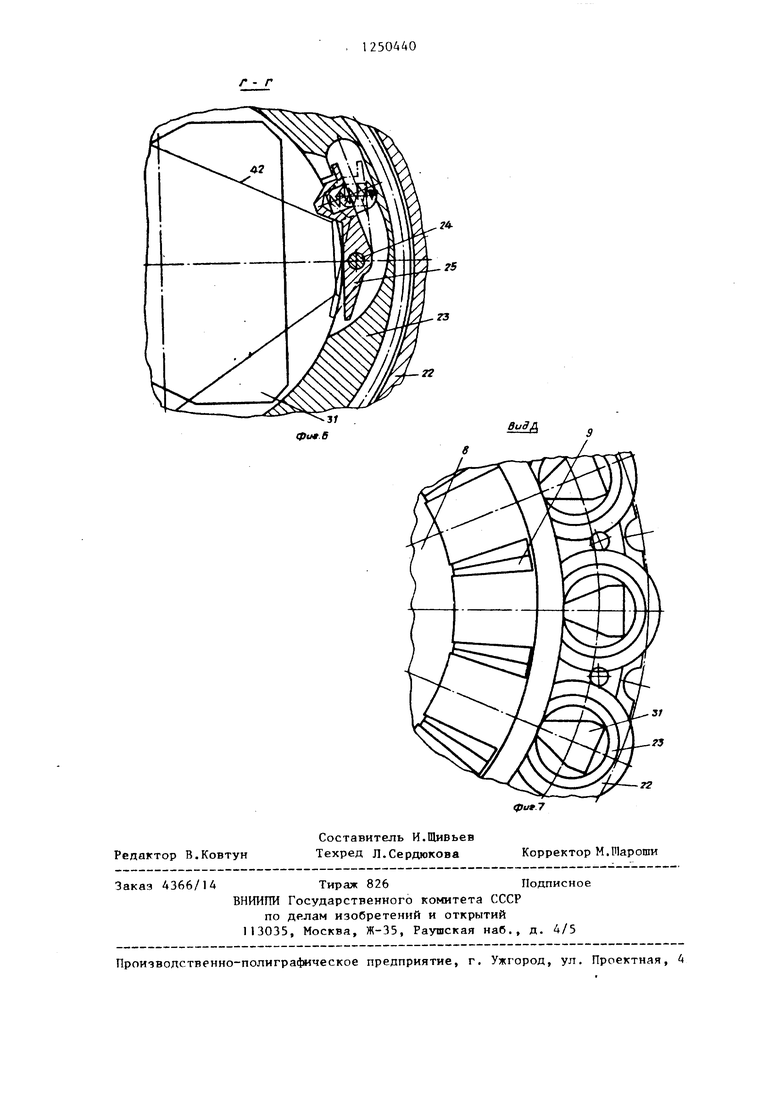
другом - с эксцентриситом е ролик 14, взаимодействумщий с пазом 15 рычага 10. Ко1гическое дно 16 бункера 1 жестко закреплено на верхнем конце вапя 5 17, свободно и соосно помещенного в центральную расточку вала 7. На нижнем конце вала I7 жестко закреплена приводная шестерня 18. Над верхним торцом барабана 2 в пазах размещены О механизмы поштучной выдачи, выполненные в виде шиберов 19 с окнами 20, форма и размеры которых выбраны из условия захвата одной заготовки в любом ее положении но плоскости. За 15 бункером 1 в расточках барабана 2 равномерно по периферии на пути зах- натных шиберов 19 размещены ориента- торм 21, состоящие ич жестко установленного внешнего цилиндра 22 (фиг.З) 20 в виде стакана и вращающегося внутреннего цилиндра 23 в ниде зубчатого колеса. На внутренней поверхности цилиндра 23 выполнен паз, в котором на оси 24 помещен подпружиненный 5 двуцлечий рычаг 25, одно плечо которого выступает внутрь цилиндра 23 и выполнено в ниде зуба для захвата де- т;гли, а второе - размещено в пазу чаподлицо с внутренней поверхностью цилиндра 23 (фиг.6) и закрывает паз от попадания в него деталей. Диаметр внутренней поверхности цилиндра 23 выбран из условия любого углового положения заготовки по плоскости относительно точки ее вращения в этой плоскости.
Привод вращения внутренних цилиндров 23 ориентатора 2 состоит из установленных в расточках барабана 2 0 корпусов 26, в которых помеп1ены валы 27 (фиг.З). На одном конце валов 27 закреплены шестерни 28, К р|;дая из которых взаимодействует с двумя цилиндрами 23,на втором - шкивы 29, охва- плваемые клииоременной передачей 30
JO
5
5
с приводом (отдельно не покатано). Под каждым вращающимся внутренним цилиндром 23 в дне внешнего цилиндра 22 имеется окно-трафар-: г 31, предназначенное для приона одной детали в требуемом угловом положении на позицию выдачи. Поп оьиентатора- ми 21 в пазах барабана 2 размещены толкатели 32 в виде ралиальнс расположенных шиберов. Возррлттю-поступательные переметения шиберам 19 и толкателям 32 передаются через рычаги 33 и ЗА от размешенных в барабана 2 чередующихся 35 и 36, взаимодействующих своими роликами с соответствующий профильными участками 37 и 38 копира 39, жестко закрепленного в стакане А. На бяраба- не 2 закреапена звездочка АО, охватываемая в зоне Р выдачи (фиг. 2) деталей конвейером А1 с захватам, вы- полняюпшм роль приемника деталей А2
Устройство работает следуюпцтм образом.
В загрузочном бункере 1 равномерно по его ггериферии навалом размещено определенное количество деталей. При вращении барабана 2 от приводной гаестерни 6 приводятся в возвратно-поступательное движение ползуны 35 и 36 от соответствующих профильных участков 37 и 38 неподвижного копира 39. Эти движения передаются захватным шиберам 19 и выталкивателям 32 через рычаги 33 и ЗА. При вращении шестерни 6 вместе с ней вращается шестерня-сателлит 13, обкатывающаяся при зтом по неподвижному центрапьному колесу 11, шестерня 6 при этом является водилом планетарной передачи. Вращение шестерни 13 передается валу 12 и ролику 1А, помещенному в паз 15 рычага 10. При этом рычаг 10 совершает качательные движения в плоскости вращения ролика IA, величина которых определяется эксцентриситетом е конца вала 12, на котором помещен ролик 1А. Далее качательные движения через вал 7 передаются воропшт&лю 8 с зубьями 9. При вращении вала I7 от шестертш 18 вращается коническое дно 16, которое отбрасывает детали от центра бункера к его периферии. Внутренние скошенные кромки соседних зубьев 9 ворощителя образуют воронку, дном которой является захватный шибер 19 с окном 20. Кроме того, внутренние
скошент,е кромки зубт.ев 9 позволяют исключить заклинивание деталей при вор11П рнии. Амплитуда колебаний зубь- Ч I npoIпитeля 8 выбрана из уело- J Бип рапенстпа величине расстояния мг:«л соседними пгиберами 19. В ре- чу Пттате клчдтельных лвижений вороши- грля 8 и вращательного движе}тия конического дтга 16 детали западают в сво- 0 гм любом угловом положении в окна 20 пптПеров 19. Зона захвата леталей оп- рг-тляетгя углом 360 -л/ , где с/ - тол зоны выдачи деталей шиберами 19 п ор1 ентаторы 21 (не превьппает 30°). 5 При вращении ротора в зоне выдачи деталей d в ориентаторы 21 шиберы 19 совершают ход вперед и выносят в гпоих окнах 20 захваченные детали 42 (кпт.чый захват 19 вьшосит одну деталь С п своем окне 20) за пределы бункера 1. При совмещении окна 20 с ориента- тором 21 деталь, потеряв опору на по- рорхности барабана 2, поступает по лнутреннему цЛпиндру 23 на поверх- 5 иость окна-трафарета 31, Нижняя поверхность окна-трафарета в этот момент закрыта вы i алкивателем 32 (фиг . 3). В тоне ff детали А2 сообщается вращение в плоскости окна-трафарета от 0 клиноременной передачи 30, шкива 29, в.ъчл 27 и гаестерни 28, взаимодейст- вутопл й с внутренним цилиндром 23 в ртшр зубчатого колеса, при зтом под- пр% ет нент1ый двуплечий рычаг 25 захва- с плрзет своей выступающей скошенной гг рхтюстью в виде зуба деталь и pariTOT ее до совмещения с окном-трафаретом 3 и западания в него. Для п(н(, надежности процесса ориен- f) тирот ання внутренний цилиндр 23 со- p(-pi:jacT несколько оборотов, хотя в больпгинстве случаев процесс ориенти- ронания заканчивается на первом пол- lioM повороте детали вокруг своей ус- 5 лорной оси, являющейся одновременно вращения внутреннего цилиндра. Но бывают случаи, когда по каким-либо причинам (заусенец на детали, неполный профиль и т.д.) происходит нополтюе западание де-али в окно- трафарет 31, деталь заклинивает и нращение ее прекращается. В зтом случае подпружзшенный двуплеч ш рычаг 25, преодолевая сопрот-.-.пление пружи- 5 нь), поворачивается в пазу цилиндра 23, перестает взаимодействоллть сво- efi с нерхностью в виде зуба с захвл- гчн:lй деталью и поворачивлсч ся Еместе с цилиндром 23 дальше, повторно захватывая деталь за другую боковую поверхность и тем самым повторяя процесс ориентирования.
При дальнейшем повороте ротора в зоне Y толкатель 32 переметается назад к центру ротора,деталь 42, потеряв опору, перемещается вниз в требуемом угловом положении на позицию вьщачи в зоне выдачи /3. В зоне выдачи fj толкатель 32 совершает ход вперед и подает деталь 42 в рабочие ячейки транспортной цепи 41, перекрывая при этом своей поверхностью окно-трафарет 31. При дальнейшем повороте ротора цикл повторяется.
Формула изобретения
Роторный автомат питания, содержащий закрепленный на барабане загрузочный бункер с коническим дном, установленным с возможностью враще- 1тя, ориентаторы, выпо-шенные в виде двух цилиндров, и приемник, отличающийся тем, что, с целью расширения технологических возможностей и повьшения надежности работы лри подаче плоских деталей сложной конфигурации, он снабжен механизмами поштучной выдачи деталей, расположенными над ориентаторами,
ворошителем, установленным над механизмами поштучной выдачи с возможностью качания в горизонтальной плоскости и вьтолненным в виде круговой гребенки, зубья которой размещены между механизмами поштучной выдачи, и толкателями, установленными под каждым ориентатором, причем ориентаторы закреплены на периферийной стороне бункера, внутренний цилиндр
каждого ориентатора установлен с возможностью вращения и снабжен подпружиненным двуплечим рычагом, смонтированным с возможностью качания в горизонтальной плоскости.
4f
20
19
UO
U4-LJ 77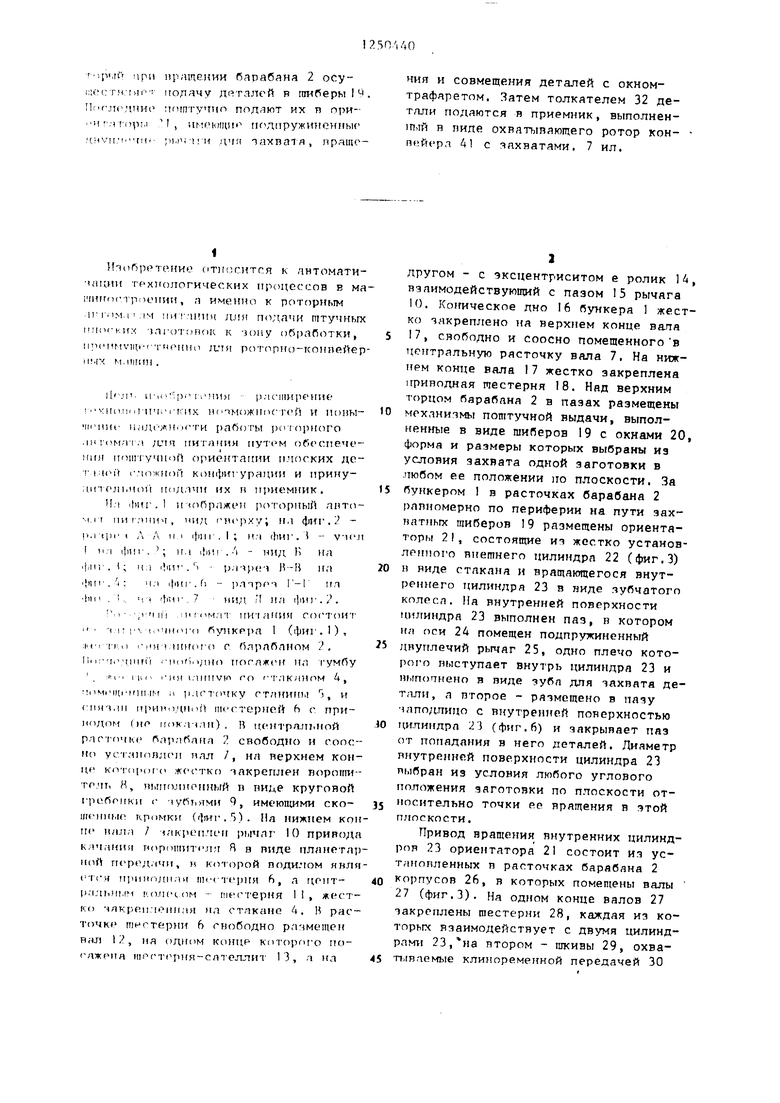
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторное питающее устройство | 1985 |
|
SU1266706A1 |
| АВТОМАТ ДЛЯ ПОДРЕЗАНИЯ ТОРЦА ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ ТИПА ТОНКОСТЕННЫХ СТАКАНОВ -. | 1970 |
|
SU275643A1 |
| Шлифовальный станок | 1980 |
|
SU903082A1 |
| Загрузочный ротор | 1989 |
|
SU1646783A1 |
| Многопозиционный автомат для сборки корпусных деталей с деталями типа подшипников и крышек | 1974 |
|
SU545443A1 |
| Загрузочный ротор | 1988 |
|
SU1673379A1 |
| Загрузочное устройство | 1985 |
|
SU1274905A1 |
| Роторный автомат питания | 1987 |
|
SU1468710A1 |
| Ротор ориентации и загрузки штучных заготовок | 1990 |
|
SU1722782A1 |
| СТАНОК ДЛЯ СБОРКИ И СМАЗКИ | 1965 |
|
SU172693A1 |
фие 4
У1
Л-в
9 2
75
S
22
фиг.7
Редактор В.Ковтун
Составитель И.Щивьев Техред Л.Сердюкова
Заказ 4366/14Тираж 826Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор М.Шароши
| ПРИВОД ДЛЯ ПЛОСКОЙ ВЯЗАЛЬНОЙ МАШИНЫ | 1923 |
|
SU1027A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
