СП
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Исполнительный орган манипулятора | 1989 |
|
SU1646845A1 |
| Привод манипулятора | 1982 |
|
SU1050862A2 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Манипулятор | 1988 |
|
SU1627400A1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
| Манипулятор | 1988 |
|
SU1548034A1 |
| Привод манипулятора | 1984 |
|
SU1266728A2 |
| Исполнительный орган манипулятора | 1985 |
|
SU1301684A1 |
Использование: для технологических операций в различных областях техники. Ведущий вал 7 соединен при помощи промежуточного вала 2 и крестовин 3 и 4 с ведомым валом 5 (схватом). Промежуточный вал состоит из двух частей, соединенных между собой поступательной кинематической парой. Ведущий вал 7 имеет коническое зубчатое колесо 6, которое входит в зацепление с зубчатым колесом 8, которое жестко связано с кольцом 9. Коническое зубчатое колесо 13 жестко связано с ведущим валом 14 и входит в зацепление с другим зубчатым колесом, которое жестко связано с кольцом 16. Для поворота корпуса 17 вокруг оси X или Y вращение от валов 7 и 14 передается соответственно кольцу 16 или кольцу 9. 2 ил.
Изобретение относится к машиностроению, в частности к промышленным роботам и манипуляторам, и может быть использовано для технологических операций.
Целью изобретения является повышение маневренности манипулятора и расширение зоны манипулирования за счет обеспечения возможности относительно углового поворота в шарнире трансмиссионных валов в двух взаимно перпендикулярных плоскостях.
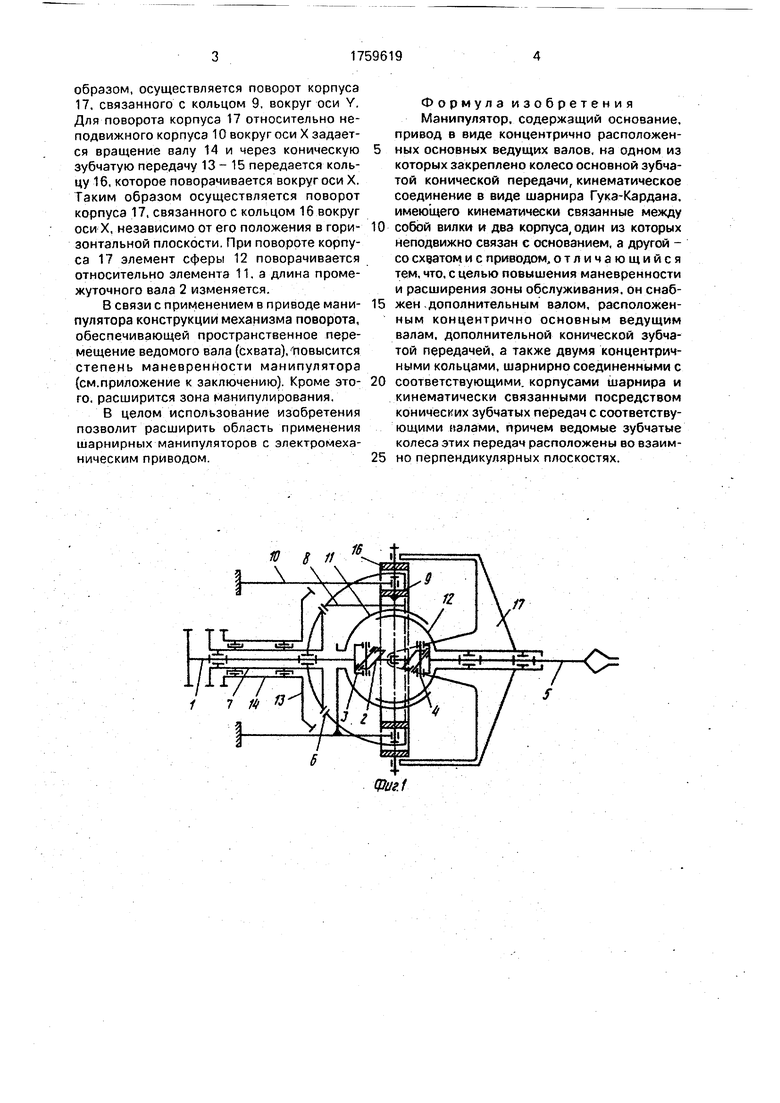
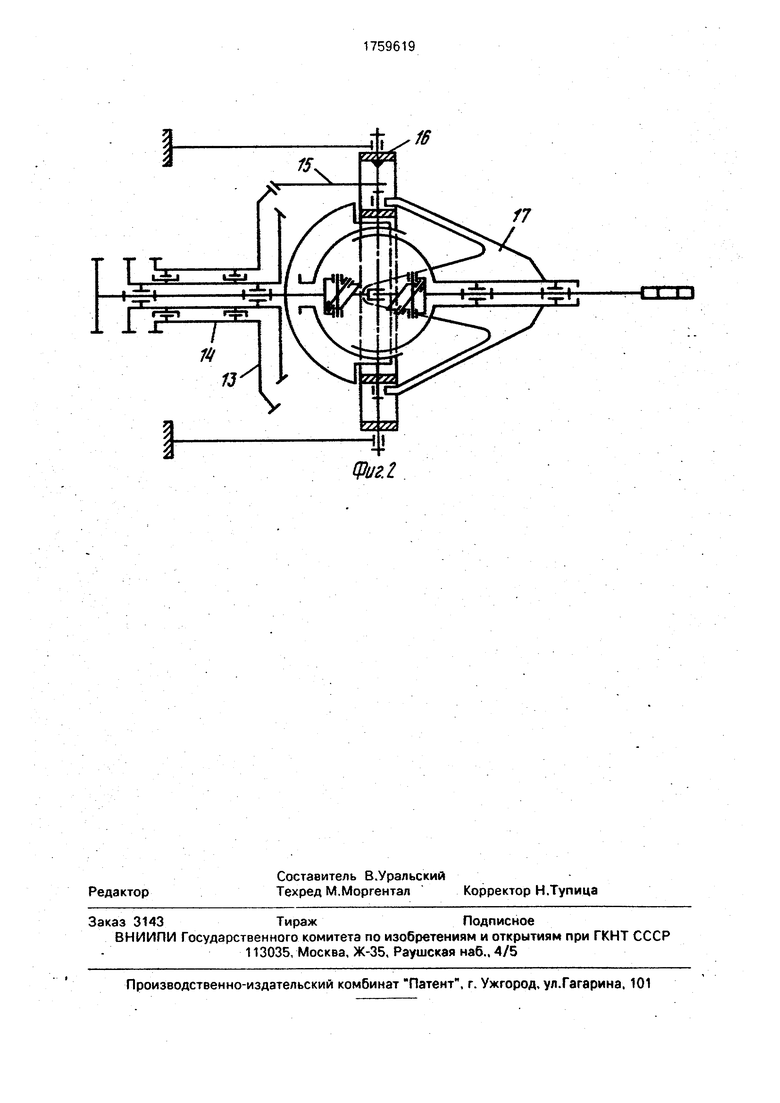
На фиг.1 изображена схема механизма поворота в одной плоскости; на фиг.2 - то же, в плоскости, перпендикулярной предыдущей.
Устройство содержит ведущий вал 1 (фиг.1), соединенный при помощи промежуточного вала 2 и крестовин 3 и 4 с ведомым валом 5 (схватом). Промежуточный вал состоит ИЗ двух частей, соединенных между собой поступательной кинематической парой. Коническое зубчатое колесо б, жестко
связанное с ведущим валом 7, входит в зацепление с зубчатым колесом 8, которое жестко связано с кольцом 9, Кольцо шарнирно соединено с неподвижным корпусом 10 манипулятора. С неподвижным корпусом жестко связана полусфера 11. вторая полусфера 12, концентричная первой, шарнирно соединена с ведомым валом. Коническое зубчатое колесо 13 (фиг.2), жестко связанное с ведущим валом 14, входит в зацепление с зубчатым колесом 15, которое жестко связано с кольцом 16. Кольцо шарнирно соединено с неподвижным корпусом. Подвижный корпус 17 манипулятора шарнирно соединен с кольцами.
Работа манипулятора осуществляется следующим образом.
Для поворота корпуса 17 относительно неподвижного корпуса 1 вокруг оси Y задается вращение валу 7 и через коническую передачу 6-8 оно передается кольцу 9, которое поворачивается вокруг оси Y. Таким
9
ю
ON Ю
образом, осуществляется поворот корпуса 17, связанного с кольцом 9, вокруг оси Y. Для поворота корпуса 17 относительно неподвижного корпуса 10 вокруг оси X задается вращение валу 14 и через коническую зубчатую передачу 13-15 передается кольцу 16, которое поворачивается вокруг оси X. Таким образом осуществляется поворот корпуса 17, связанного с кольцом 16 вокруг оси X, независимо от его положения в гори- зонтальной плоскости. При повороте корпуса 17 элемент сферы 12 поворачивается относительно элемента 11, а длина промежуточного вала 2 изменяется.
В связи с применением в приводе мани- пулятора конструкции механизма поворота, обеспечивающей пространственное перемещение ведомого вала (сх вата), повысится степень маневренности манипулятора (см.приложение к заключению). Кроме это- го. расширится зона манипулирования.
В целом использование изобретения позволит расширить область применения шарнирных манипуляторов с электромеханическим приводом.
Формула изобретения Манипулятор, содержащий основание, привод в виде концентрично расположенных основных ведущих валов, на одном из которых закреплено колесо основной зубчатой конической передачи, кинематическое соединение в виде шарнира Гука-Кардана, имеющего кинематически связанные между собой вилки и двз корпуса, один из которых неподвижно связан с основанием, а другой - со схватом и с приводом, отличающийся тем, что, с целью повышения маневренности и расширения зоны обслуживания, он снабжен дополнительным валом, расположенным концентрично основным ведущим валам, дополнительной конической зубчатой передачей, а также двумя концентричными кольцами, шарнирно соединенными с соответствующими, корпусами шарнира и кинематически связанными посредством конических зубчатых передач с соответствующими налами, причем ведомые зубчатые колеса этих передач расположены во взаимно перпендикулярных плоскостях.
1В ±
± 16
фиг.2
| Привод манипулятора | 1982 |
|
SU1114544A2 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
