Изобретение относится к оборудованию промышленности строительных материалов и может быть использовано в автоматических поточных линиях по.производству кирпича, керамических .камней, блоков и других изделий прямоугольной формы.
Известно устройство для съема, транспортировки и укладки керамических : камней,содержащее смонтированные на корпусе групповой щечный захват и силовой цилийдр, причем щёки захвата закреплены через одну, по крайней мере, на первой и второй несущих штангах, а корпус снабжен шарт нирно установленным двуплечим рычагом, одно плечо которого шарнирно соединено со.щекой, смонтированной на первой штанге, а другое плечо шарнирно соединено со- штоком силового цилиндра и щекой, установленной на второй штанге 1.
Недостатками данного устройства являются значительная металлоемкость и существенные энергетические затраты.
Наиболее близким по технической сущности к предлагаемому является захват для переноса кирпичей, содер;жащий раму, подъемную штангу с привО
дом, механизм зажима со щеками и кривошипно-шатунными парами, механизм фиксации с собачйой и поворотный упор, смонтированйый на раме и .связанный с собачкой посредством тяги, при этом подъемная штанга выполнена с поперечным пазом и снабжена возвратной пружиной, шатуны кривошипно-шатунных пар механизма Зс1жима
10 связаны с каретками, а кривошипы с подъемной штангой, механизм фиксации содержит подпружиненную собачку, входящую в паз подъемной штанги и связанную посредством тяги с ,
15 воротным упором 2.
Недостатками этого захвата являются ненадежность работы вследствие необходимости подрегулировки отдельных узлов из-зй их выработки, непос20тоянность усилия зажима изделий щеками и нечеткость фиксации предельного разведения цек,сложность взаимосвязи подъемной штанги с механизмом зажйма и регу.пировки усилия зажима.
25
Цель изобретения - упрощениеконструкции и повышение ее надежности за счет обеспечения постоянного усилия зажима изделий и его регулирования.
Поставленная цель достигается тем, что в захвате для пербйоса изделий
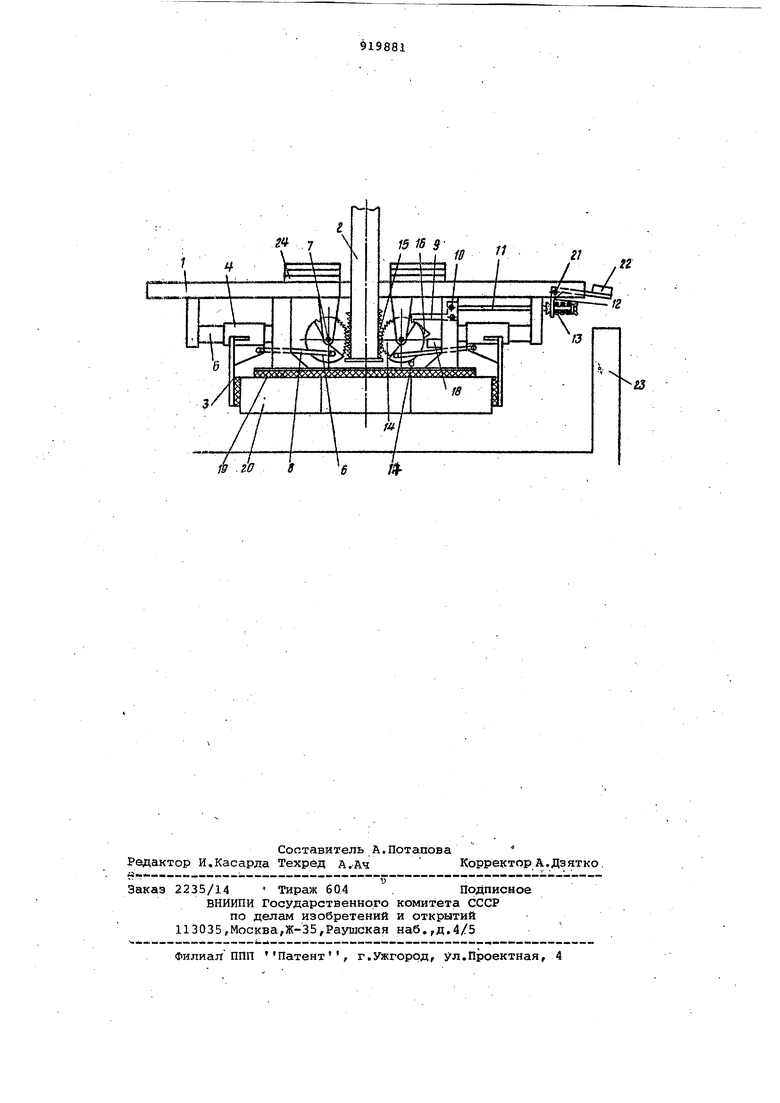
30 ppnMoyrojjbHoft формы, содержеицем раму подъемную штангу с приводом, механиз зажима со щеками и кривошипно-шатуннымк парами, механизм фиксации, вклю чающий собачку и поворотный упор, св эаиный с собачкой посредством тяги, подъемная штанга снабжена зубчатыми рейками, а кривошипы кривошипно-шату ных пар механизма зажима - зубчатыми сегментами, вэаимодейстзуквдйии с зубчатыми рейками, причем на одном из кривошипйз смонтированы флажок, электрически связанный с приводом подъемной штанги, и упор, взаимодейс вующий с , механизма , фиксации, при 3Toiv5 механизм фиксации снаб жен пружинящим элементом, установлен ным на тяге-и контактирующим с поворотным упором, Яа свободном конце которого смонтирован регулируемый противовес, а собачка выполнена поворотной. Кром$ того, захват может быть снабжен смонтированной на раме опорной площадкой с эластичной повер ностью для контакта с горизонтальной поверхностью изделий. На чертеже представлена схема зах вата. Захват для переноса изделий прямо угольной формы содержит раму 1, подъ емную штангу 2 с приводом (на чертеж не показан), механизм зажима сдщека ми 3, жестко связанными с каретками 4, одетыми-на направляющие 5, смонти рованные в раме 1, и кривошипно-шатунными парами, состоящими из кривошипов б, установленных на осях 7 с возможностью поворота и шарнирно свя занных с ниг4И шатунов- 8 в виде тяг, другой конец кртррых шарнирно связан с каретками 4. В раме 1 смонтирован механизм фиксации, состоящий из собачки 9 г установленной на оси 10 с возможностью поворотаи шарнирно связанной с тягой 11, на другой конец которой свободно одето одно из плечей Г-образного поворотного упора 12, при этом между плечом поворот ного упора 12 и свободным концом тяги 11 установлен пружинящий элемент. 13. Кривошипы б снабжены зубчатыми сегментами 14, при этом на подъемной штанге 2 выполнены зубчатые рейки 15 так., что они находятся в зацеплении с зубчатыми сегментами 14 кривошипов б. Кроме того, один из кривошипов б,- снабжен упором 16, с возможностью взаимодействия последнего с собачкой 9 механизма фиксации, а так же флажком 17, электрически через бесконтактный переключатель 18 связанным с приводом подъемной штанги З - В нижней части рамы 1 установлена опорная площадка 19, выполненная с эластичной новерхностью для взаимодействия с переносимыми изделиями 20 Свободное плечо поворотного упора 12, смонтированного на оси 21, снаб жено противовесом 22, при этом поворотный упор 12 установлен с возможностью взаимодействия с дополнительг ным упором 23 позиции.загрузки захвата. , Усилие зажима изделий 20 щеками 3 . захвата, как следствие Взаимосвязи., подъемной штанги 2с 1, прямо пропорционально массе рамы 1 с установленными на ней механизмами зажима и фиксации, а также эластичной опор« ной площадки 19. Для изменения усилия зажима изделий 20 захватом предусмотрена установка на раме 1 допоЛг; нительных грузов 24. Захват для переноса изделий.прямоугольной формы работает следующим образом. Изделия 20, зажатые между щеками 3, переносятся на позицию разгрузки (на чертеже не показана) . При опускании подъемной штанги 2 изделия опускаются на позицию , при этом эластичная опорная площадка 19, закрепленная в нижней части рамы 1, опирается на изделия 20, в результате чего рама 1 фиксируется в горизонтальном положении. Подъемная штанга 2 продолжает движение вниз, при этом через зубчатые рейки 15 П1эиводятся во вращение навстречу друг другу зубчатые сегменты 14 и жестко связанные с ними кривошипы б механизма зажима. При вращении кривошипов б шатуны 8 в виде тяг давят на каретки 4, одея:ыена направляющие 5, что приводит к перемещению кареток 4 по направляющим 5 и раздвижке жестко связанных с ними щек 3, вследствие чего изделия 20 освобождаются. Одновременно при вращении кривошипов 6 упор 16 одного из них свободно 1роходит за собачку 9., установленную на оси 10 с возможностью поворота, при этом за счет противовеса 22 поворотного упора 12, связанного через тягу 11 с пружинящим элементом 13 с собачкой 9/ гюЬледняя поджимается вплотную к кривошипу 6. После освобождения изделий 20 . флажок 17, установленный на кривошипе 6, входит в прорезь бесконтактного переключателя 18, установленного на раме 1 и связанного с приводом подъемной штанги 2, вследствие чего привод подъемной штанги 2 переключается на движение вверх. При этом через зубчатые рейки 15 j и зубчатые сегменты 14 приводятся во вращение кривошипы 6 до того, крк упор 16 войдет в контакт с собачкой 9, После этого свободный ход подъемной штанги 2 вверх и холостое сближение щек 3 прекращается, и захват с разведенными щеками 3 переносится к позиции загрузки. Частичное сбли.жение щек 3 при этом ограничено за данным расстоянием между щеками на |поэиции загрузки При опускании на позиции загрузки поворотный упор 12 плечом с противовесом 22 опирается на дополнительный упор 23, сжимая пружинящий элемент 13.на тяге 11.При фиксации рамы 1 в горизонталь .,ном положении на слое изделий 20, подготовленном для переноса, подъем ная штанга 2 продолжает движение : вниз, приводя через зубчатые рейки 15во вращение зубчатые, сегменты 14 и кривошипы б, вследствие чего упор 16кривошипа б отходит от собачки 9. Собачка 9 при этом под действием .пружинящего элемента 13 и тяги 11 поворачивается на оси 10 и выходит из ЗОНЫдействия упора 16. При этом флажок 17, установленный на кривошипе б, входит в прорезь бесконтактного переключателя 18, вследствие чего привод подъемной штанги переключается на движение вверх. При это зубчатые сегменты 14 через зубчатые рейки 15 приводят во вращение кривошипы б и через шатуны 8 в виде, тяг, соединенные с каретками 4 щеки 3 сдвигаются, зажимая и.зделия 20. Пр этом упор 16 кривошипа б свободно проходит мимо отведенной собачки 9. После зажатия изделий 20 сведение щек прекращается за счет сопротивления изделий 20 и подъемная штанга 2 с грулсеной рамой 1 начинает движение, верх. При поднятии груженой рамы 1 с . позиции загрузки поворотный упор 12 отходит от дополнительного упора 23 позиции загрузки и под действием его противовеса 22 возвращается в исходное положение, поджимая через ,тягу 11 собачку 9 к кривошипу б.Посл это.го цикл по разгрузке и загрузке захвата повторяется. Таким образом, предлагаемый захва для переноса изделий прямоугольной фор мы позволяет при минимальных энергетических затратах обеспечить зажим между щеками с постоянным усилием, пропорциональным массе рамы захвата со смонтированными на ней механизмами и не зависит от выработки каких либо узлов захвата. При использований захвата за счет конструкции рамы механизма зажима и фиксации существенно повышается надежность работы агрегата. Захват отличается простотой его отдельных узлов и их взаимосвязи, при этом за счет установки или съема дополнительных грузов на раме имеется возможностьв широком диапазоне изменять усилие зажима изделий захватом. Формула изобретения 1.Захват для переноса изделий прямоугольной формы, содержащий раму, подъемную штангу с приводом, механизм зажима со щеками и кривошипно-шатунными парами, механизм фиксации, включающий собачку и поворотный упор, связанный с собачкойпосредством тяги, о т л и ч а ю щ и и с я тем, что, с целью упрощения конструкции и повышения надежности, подъемная штанга снабжена зубчатыми рейкакш, а кривошипы кривощипно-шатунных пар механизма зажима - зубчатыми сегментами, взаимодействующими с зубчатыми рейками, причем на одном из кривошипов смонтированы флажок, электрически связанный с приводом подъемной штанги,и упор, взаимодействующий с собачкой механизма фиксации при этом механизм фиксации снабжен пружинящим элементом, установленным на тяге и контактирующим с поворотным упором, на свободном конце которого смонтирован регулируемый противовес, а собачка выполнена поворотной. 2.Захват по п. 1, отл.ичающ и и с я тем, что он снабжен смонтированной на раме опорной площадкой с эластичной поверхностью для контакта с горизонтальной поверхностью изделий. Источники информации. Принятые во внимание при экспертизе 1.Авторское свидетельство СССР В 645838, кл. В 28 В 13/00, 1976. 2.Авторское свидетельство СССР № 631348, кл. В 28 В 13/00, 1976. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для переноса слоя кирпича на печную вагонетку | 1990 |
|
SU1787790A1 |
| Устройство для укладки в пакет металлических чушек | 1983 |
|
SU1162715A1 |
| Трубогибочная машина | 1973 |
|
SU467556A1 |
| Устройство для подачи поддонов | 1980 |
|
SU899391A1 |
| Шаговый конвейер | 1990 |
|
SU1787881A1 |
| Автомат-укладчик кирпича на сушильные рамы | 1980 |
|
SU980992A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ ПОДДОНОВ С КИРПИЧОМ | 1992 |
|
RU2049715C1 |
| Механизм кнопочного управления приводом ткацкого станка | 1990 |
|
SU1756417A1 |
| Устройство для шелкотрафаретной печати | 1984 |
|
SU1178627A1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 1996 |
|
RU2146212C1 |