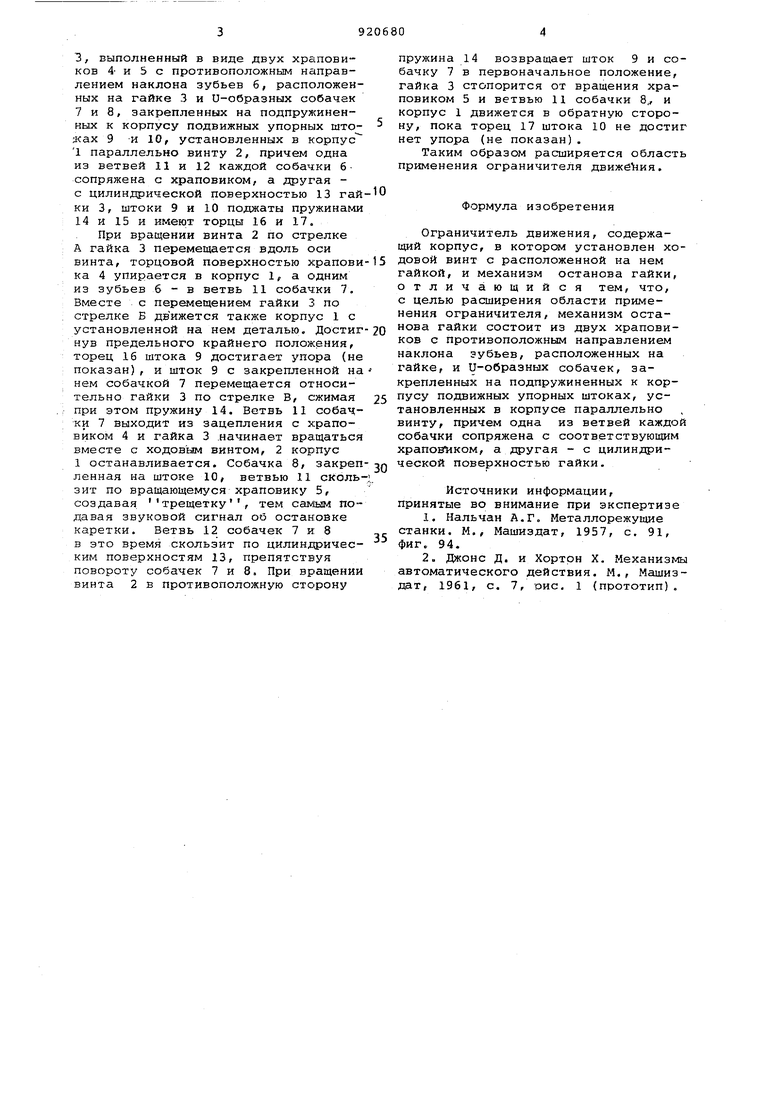
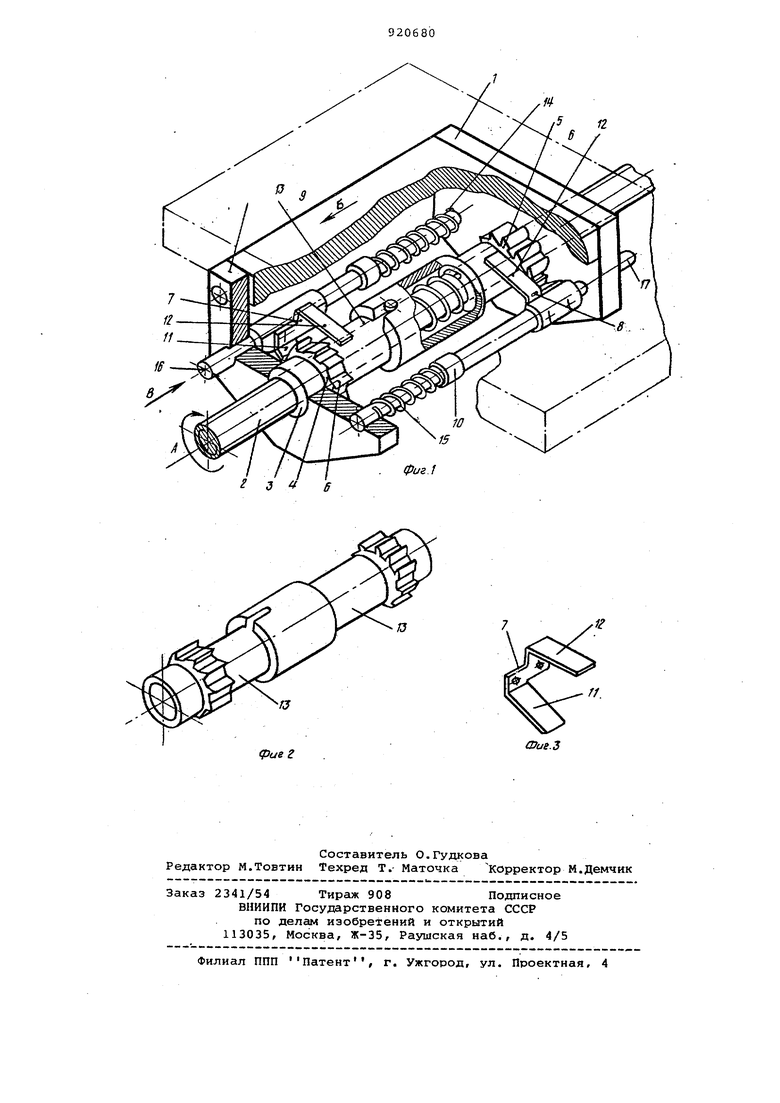
Изобретение относится к машиностроению и может применяться в стан костроении и приборостроении. Известен ограничитель хода, применяемый в станкостроении, содержащи ходовой винт, гайку, падающий червяк и фрикционную муфту, в ко тором ограничение движения суппорта осуществляется путем выведения из зацепления червячного колеса и падающего червяка 1 . Недостатком этой конструкции явля ется наличие трения в фрикционной муфте в застопоренном положении, от сутствие сигнализации об остановке, а также необходимость ручного приведения в действие механизма подвижной опоры при новом введении в зацепление упавшего червяка. Известен также ограничитель движения, в котором ограничение движения осуществляется путем расцепления муфты, закрепленной на ходовом винте и вале привода 2. Недостатком этой конструкции является односторонность действия огра ничителя движения. Целью изобретения является расширение области применения путем обес печения ограничения при прямом и обратном перемещении гайки. Поставленная цель достигается тем, что в ограничителе движения, содержащем корпус, вкотором установлен ходовой винт с расположенной на нем гайкой, и механизм останова гайки, последний выполнен в виде двух храповиков с противоположньлм направлением нaклo a зубьев , расположенных на гайке, и U-образных собачек, закрепленных на подпружиненных к корпусу подвижных упорных штоках, установленных в корпусе параллельно винту., причем одна из ветвей каждой собачки сопряжена с соответствующим храповиком, а другая - с цилиндрической поверхностью гайки. На фиг, 1 изображен ограничитель движения в собранном виде, аксонометрическая проекция; на фиг, 2 гайка в собранном виде, снятая с ходового винта, аксонометрическая проекция; на фиг. 3 - изображена собачка, ограничивающая движение гайки, аксонометрическая проекция. Ограничитель движения содержит корпус 1, в котором установлен ходовой винт 2 с расположенной.на нем гайкой 3 и механизм останова гайки 3, выполненный в виде двух храповиков 4- и 5 с противоположным направлением наклона зубьев б, расположенных на гайке 3 и U-образных собачек 7 и 8, закрепленных на подпружиненных к корпусу подвижных упорных штоэ ах 9 -и 10, установленных в корпус 1 параллельно винту 2, причем одна из ветвей 11 и 12 каждой собачки бсопряжена с храповиком; а другая с цилиндрической поверхностью 13 гай ки 3, штоки 9 и 10 поджаты пружинами 14 и 15 и имеют торцы 16 и 17. При вращении винта 2 по стрелке А гайка 3 перемещается вдоль оси винта, торцовой поверхностью храпови ка 4 упирается в корпус 1, а одним из зубьев б - в ветвь 11 собачки 7. Вместе с перемещением гайки 3 по стрелке Б движется также корпус 1 с установленной на нем деталью. Достиг нув предельного крайнего положения, торец 16 штока 9 достигает упора (не показан), и шток 9 с закрепленной на нем собачкой 7 перемещается относительно гайки 3 по стрелке В/ сжимая при этом пружину 14. Ветвь 11 собачки 7 выходит из зацепления с храповиком 4 и гайка 3 .начинает вращаться вместе с ходовым винтом, 2 корпус 1 останавливается. Собачка 8, закреп ленная на штоке 10, ветвью 11 скользит по вращающемуся храповику 5, создавая. трещетку , тем cawJbW подавая звуковой сигнал об остановке каретки. Ветвь 12 собачек 7 и 8 в это время скользит по цилиндрическим поверхностям 13, препятствуя повороту собачек 7 и 8. При вращении винта 2 в противоположную сторону пружина 14 возвращает шток 9 и собачку 7 в первоначальное положение, гайка 3 стопорится от вращения храповиком 5 и ветвью 11 собачки 6 и корпус 1 движется в обратную сторону, пока торец 17 штока 10 не достиг нет упора (не показан). Таким образом расширяется область применения ограничителя движения. Формула изобретения Ограничитель движения, содержащий корпус, в котором установлен ходовой винт с расположенной на нем гайкой, и механизм останова гайки, отличающийся тем, что, с целью расширения области применения ограничителя, механизм останова гайки состоит из двух храповиков с противоположным направлением наклона эубьев, расположенных на гайке, и у-образных собачек, закрепленных на подпружиненных к корпусу подвижных упорных штоках, установленных в корпусе параллельно винту, причем одна из ветвей каждой собачки сопряжена с соответствующим храповмком, а другая - с цилиндрической поверхностью гайки. Источники информации, принятые во внимание при экспертизе 1.Нальчан А.Г. Металлорежущие станки. М., Машиздат, 1957, с. 91, фиг« 94. 2.Джонс Д. и Хортрн X. Механизмы автоматического действия. М., Машизf&.T, 1961, с. 7, РИС. 1 (прототип). I 3 J/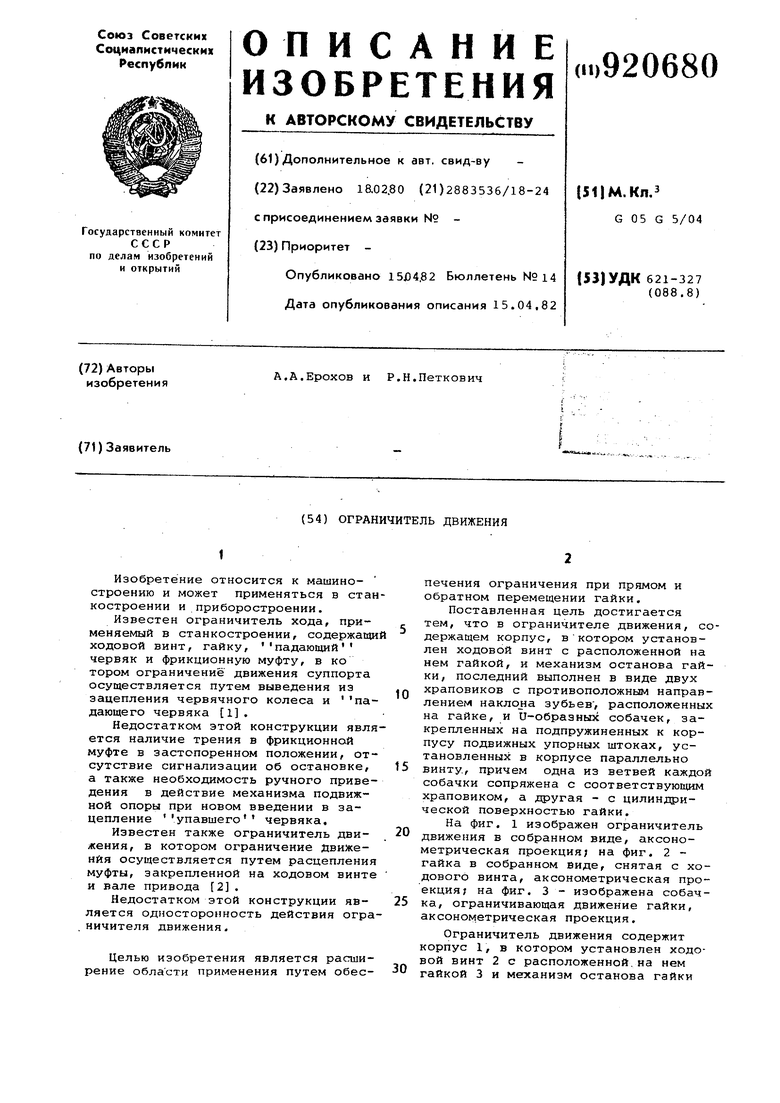
| название | год | авторы | номер документа |
|---|---|---|---|
| Ограничитель вращения вала | 1983 |
|
SU1109725A1 |
| Дисковый тормоз | 1987 |
|
SU1548552A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОКАРНЫМ СТАНКОМ | 1940 |
|
SU63198A1 |
| Машина для накатки лент пасмами | 1937 |
|
SU53614A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1938 |
|
SU57816A1 |
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2002 |
|
RU2221943C2 |
| Тормоз | 1973 |
|
SU527144A3 |
| Устройство для радиального перемещения вращающегося инструмента | 1980 |
|
SU931313A1 |
| Дисковый тормоз | 1987 |
|
SU1627762A2 |
| Автоматическое приспособление к станку для резки колец и шайб из трубчатых резиновых заготовок | 1950 |
|
SU87085A1 |
0
фиг г
a
Шие.З
